






脉宽调制(或PWM)是一种流行和有效的驱动直流电机的方法,因为我们可以用比连续线性调节显着更少的功率损耗来控制电机。
使用 PWM 可以控制绕组中的电流,进而控制输出转矩,因为转矩与平均绕组电流成正比。 因此,由于转矩的线性响应,电流将与 PWM 成正比。
在电路中,电阻负载的电流与PWM成比例。然而,直流电机比电阻负载更复杂,它们包含一个电感,当旋转时,它们产生反电动势。这些因素通常意味着PWM控制不是严格的线性的,PWM频率(不仅仅是占空比)实际上是相当重要的输出参数。
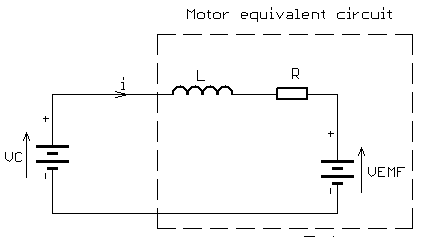
当电机静止(或以非常低的速度旋转)时,没有反电动势(或非常小),电路变得更简单。 在这种情况下,电流受到绕组电阻和线圈电感的限制。
附带说明一下,如果电机使用稳压直流电源而非 PWM 工作,那么电流将仅由电阻决定,因为电感在恒定电源下没有阻抗。
我们更新了下面的等效电路,以反映电机在低速或无速时的情况,仅由串联 RL 电路组成。
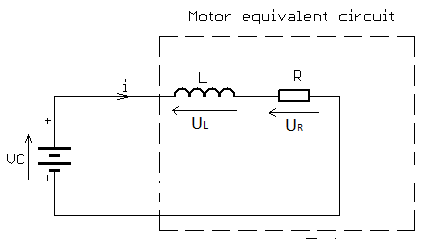
输入电压 V 等于电感两端的压降和电阻两端的压降之和:
随着时间的推移,电感两端的电压趋向于 0,而电阻两端的电压趋向于 V。这与直觉一致,即只要电路中的电流发生变化,电感两端就会有电压——如 电路达到稳态,没有进一步的电流变化,最终没有电感电压。
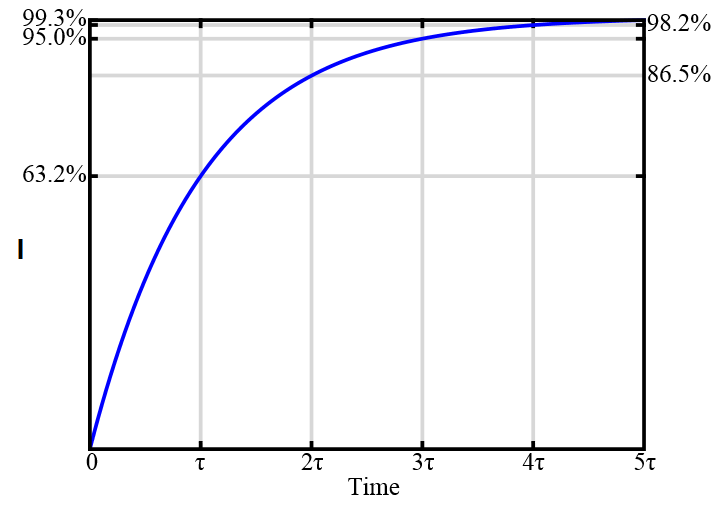
所有串联的 RL 电路都有一个时间常数,通常表示为,即元件两端的电压达到
的最终值。 所以
是
所需的时间。 类似地,
是
所需的时间。
当电压施加到电路时,L 的电感会减慢电流上升的速度。 发生这种情况是因为电感器会产生一个反电动势,它会阻止流过它的电流。 这可以防止电流(以及电阻器两端的电压)的上升或下降速度比电路的时间常数快得多。
因此,当电源接通时,电流不会立即达到其稳态值。 相反,上升需要几个时间常数才能完成。
当使用 PWM 进行直流电机控制时,这种情况在 PWM 的每个周期都会重复。 如果负载只是电阻,PWM 频率没有影响,但在此 RL 电路中,电流上升受电感限制。
因此,使用更高频率的 PWM 信号为电流上升提供的时间更少。
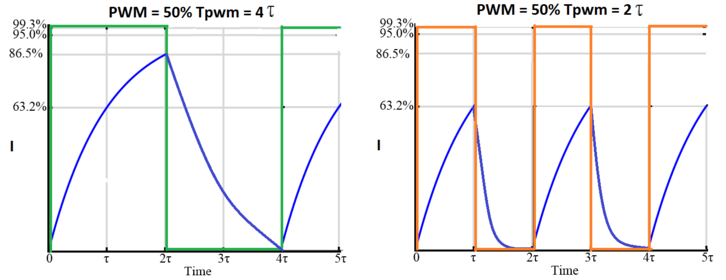
这意味着要模拟线性响应,PWM 的“开启”脉冲时间应大于 5,即
。
例如,如果我们的电机有一个时间常数 ,那么最小脉冲宽度应该大于
。
如果我们的最小可用 PWM 占空比是 5%,那么我们应该选择一个频率以确保它长于。 这给出了
的最小 PWM 周期。 1ms 的周期意味着我们线性响应的最大频率为1kHz,任何更低且在低占空比下,电流都没有足够的时间接近其稳态值。
举例:
让我们尝试计算最大 PWM 频率,它给出了线性扭矩响应1% PWM 分辨率。 对于这个例子,我们选择一款直流电机,在数据表中找到其技术细节。
额定电压 = 1.5V
电阻 = 3.4 Ω
电感 = 19 μH
该电机的时间常数为:
因此最小脉冲宽度应大于:
最小 PWM 分辨率为 1% 时,最小脉冲宽度为:
这决定了最大频率线性响应,请记住,这是电机绕组中的电感未将电流平均到低于可为电机提供最大扭矩的水平的地方):
因此,即如果您想最大化电机的扭矩,请使用直流或频率小于 357Hz 的 PWM(在本例中)驱动它。














 7495
7495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









