







基于STM32的无线充电小车设计与实现

摘要:本文设计并实现了一种基于STM32F103C8T6核心板的无线充电小车。该小车具备蓝牙控制、红外寻迹和无线充电功能,通过按键可切换不同模式,包括循迹模式、蓝牙模式、无线充电模式等。硬件部分采用STM32F103C8T6核心板作为主控,搭配红外循迹模块、蓝牙模块、无线充电模块和L298N电机驱动模块等。经测试,小车各项功能运行正常,能够实现预期的设计目标。
关键词:STM32F103C8T6;无线充电小车;蓝牙控制;红外寻迹
第一章 绪论
1.1 研究背景与意义
随着科技的不断发展,智能小车在物流、仓储、家庭服务等领域的应用越来越广泛。无线充电技术为智能小车的续航提供了更加便捷的解决方案,而蓝牙控制和红外寻迹功能则增强了小车的智能化和自动化程度。本研究旨在设计一种基于STM32的无线充电小车,结合蓝牙控制和红外寻迹功能,为智能小车的发展提供新的思路和方法。
1.2 国内外研究现状
在智能小车领域,国内外已经开展了大量的研究工作。国外一些发达国家在智能小车的控制算法、传感器技术和无线通信技术方面取得了显著的成果。国内也有许多高校和科研机构致力于智能小车的研究,但在无线充电技术与智能小车功能的集成方面仍存在一定的不足。
1.3 研究目标与内容
本研究的主要目标是设计并实现一种基于STM32的无线充电小车,具体研究内容包括:
- 硬件选型与设计:选择合适的STM32核心板、红外循迹模块、蓝牙模块、无线充电模块和电机驱动模块等硬件组件,并设计合理的硬件电路。
- 软件编程与实现:编写系统软件,实现小车的模式切换、蓝牙控制、红外寻迹和无线充电等功能。
- 系统测试与优化:对系统进行全面测试,包括功能测试、性能测试等,并根据测试结果对系统进行优化和改进。
第二章 系统总体设计
2.1 系统功能需求分析
根据研究目标,本系统需要具备以下功能:
- 模式切换功能:通过按键可切换小车的不同模式,包括循迹模式、蓝牙模式、无线充电模式等。
- 蓝牙控制功能:在蓝牙模式下,通过手机APP可控制小车的运动。
- 红外寻迹功能:在循迹模式下,小车能够根据红外循迹模块的反馈自动寻迹。
- 无线充电功能:在无线充电模式下,小车能够停止运动(或者循迹到充电区)并进行无线充电。
2.2 系统总体架构设计
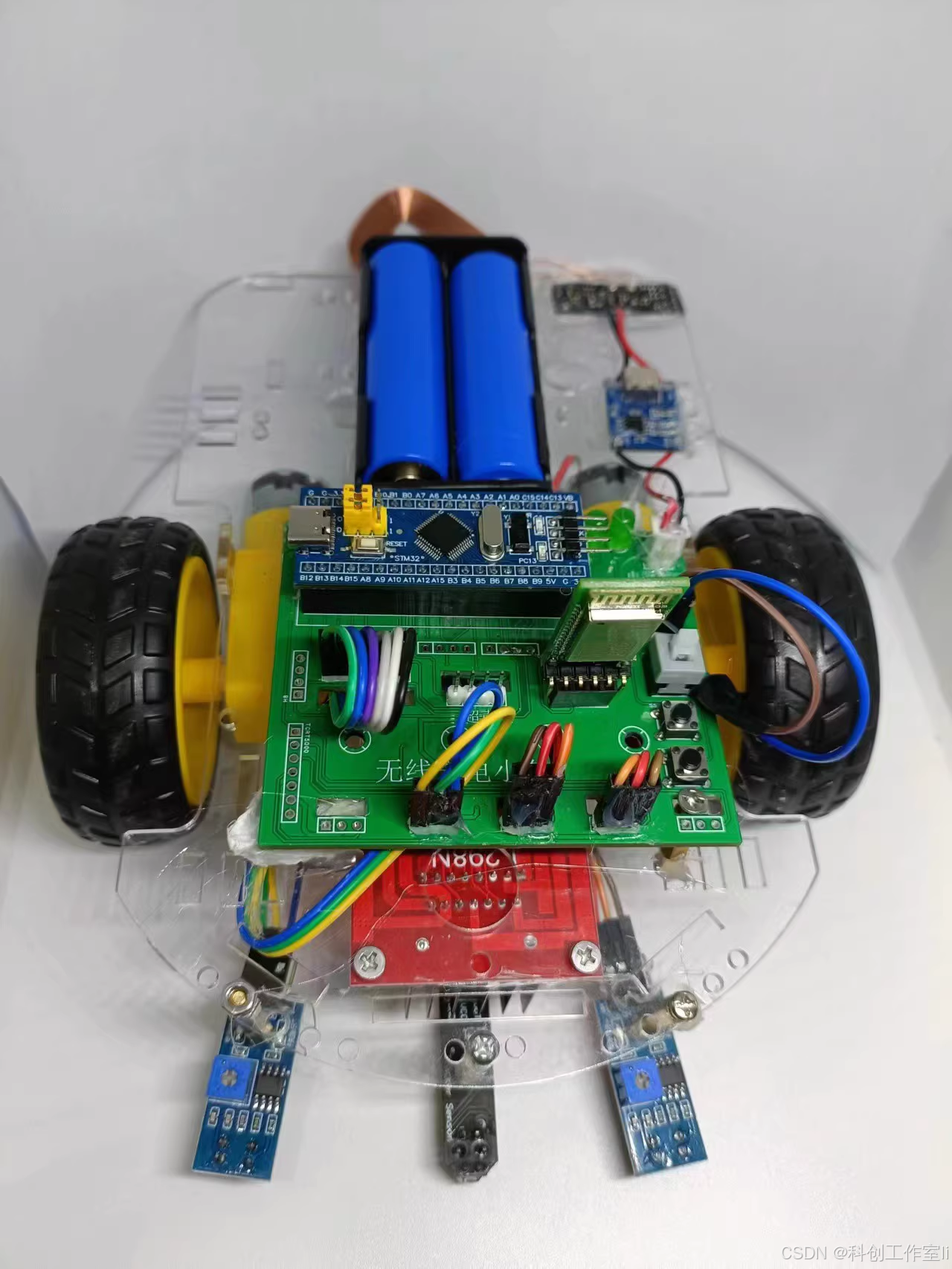
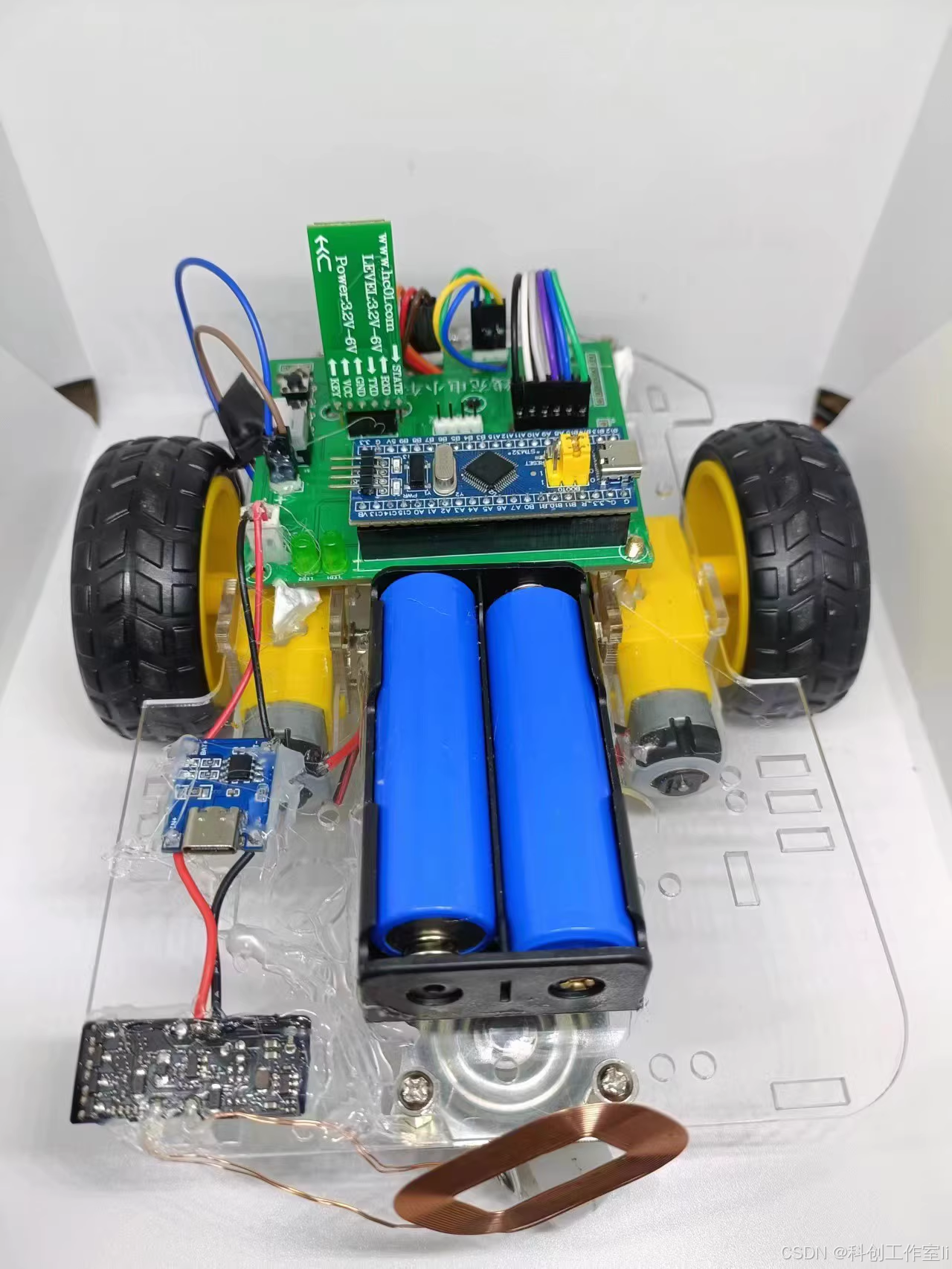
系统总体架构如图2-1所示,主要包括STM32F103C8T6核心板、红外循迹模块、蓝牙模块、无线充电模块、L298N电机驱动模块、2WD小车底盘和按键等。
<img src="https://example.com/system_architecture.png" />
- STM32F103C8T6核心板:作为系统的主控芯片,负责处理各种数据和控制各个模块的工作。
- 红外循迹模块:用于检测小车前方的路线,为小车的循迹提供反馈信号。
- 蓝牙模块:用于与手机APP进行通信,实现蓝牙控制功能。
- 无线充电模块:包括发射端和接收端,实现小车的无线充电功能。
- L298N电机驱动模块:用于驱动小车的电机,控制小车的运动。
- 2WD小车底盘:为小车提供机械结构支持。
- 按键:用于切换小车的不同模式。
2.3 系统设计方案选择
2.3.1 主控芯片选择
选择STM32F103C8T6核心板作为系统的主控芯片,主要原因如下:
- 高性能:STM32F103C8T6基于ARM Cortex-M3内核,主频高达72MHz,能够满足系统对数据处理和控制的需求。
- 丰富的外设接口:STM32F103C8T6具有丰富的外设接口,如USART、SPI、I2C、GPIO等,方便连接各种外设模块。
- 易于开发:STM32F103C8T6的开发环境成熟,有大量的开发资料和社区支持,便于快速开发和调试。
2.3.2 传感器模块选择
- 红外循迹模块:选择TCRT5000红外循迹模块,具有灵敏度高、稳定性好的特点,能够准确检测小车前方的路线。
- 蓝牙模块:选择HC-04蓝牙模块,具有通信距离远、功耗低等优点,方便与手机APP进行通信。
2.3.3 电机驱动模块选择
选择L298N电机驱动模块,主要原因如下:
- 驱动能力强:L298N能够提供较大的驱动电流,满足小车电机的驱动需求。
- 易于控制:L298N通过PWM信号控制电机的转速和方向,控制简单方便。
2.3.4 无线充电模块选择
选择合适的无线充电模块,包括发射端和接收端,确保小车能够实现无线充电功能。
第三章 系统硬件设计
3.1 STM32F103C8T6核心板最小系统设计
STM32F103C8T6核心板最小系统包括电源电路、时钟电路、复位电路和调试接口电路等。电源电路为系统提供稳定的工作电压,时钟电路为STM32提供时钟信号,复位电路确保系统在异常情况下能够可靠复位,调试接口电路用于程序的下载和调试。
3.2 红外循迹模块接口电路设计
红外循迹模块通过数字信号输出接口与STM32的GPIO口相连,实现循迹信号的采集。接口电路包括电源电路和信号接口电路等。电源电路为红外循迹模块提供稳定的工作电压,信号接口电路将红外循迹模块输出的数字信号传输给STM32。
3.3 蓝牙模块接口电路设计
蓝牙模块通过USART接口与STM32相连,实现与手机APP的通信。接口电路包括电源电路、通信电路等。电源电路为蓝牙模块提供合适的工作电压,通信电路通过USART接口实现STM32与蓝牙模块之间的数据传输。
3.4 无线充电模块接口电路设计
无线充电模块包括发射端和接收端,接收端通过电磁感应原理将电能转换为直流电,为小车供电。接口电路包括电源电路和充电控制电路等。电源电路为无线充电模块提供稳定的工作电压,充电控制电路实现充电过程的控制和管理。
3.5 L298N电机驱动模块接口电路设计
L298N电机驱动模块通过PWM信号和GPIO信号与STM32相连,实现电机的驱动和控制。接口电路包括电源电路、信号接口电路等。电源电路为L298N提供驱动电机的电源,信号接口电路将STM32输出的PWM信号和GPIO信号传输给L298N。
3.6 按键电路设计
按键电路通过GPIO口与STM32相连,实现模式切换功能。按键电路包括按键、上拉电阻等元件,确保按键信号的稳定可靠。
第四章 系统软件设计
4.1 系统软件总体架构
系统软件采用模块化设计,主要包括主程序、模式切换模块、蓝牙控制模块、红外寻迹模块、无线充电模块和电机驱动模块等。主程序负责系统的初始化和各个模块的调度;模式切换模块负责处理按键信号,实现不同模式的切换;蓝牙控制模块负责与手机APP进行通信,实现蓝牙控制功能;红外寻迹模块负责处理红外循迹模块的反馈信号,实现小车的循迹功能;无线充电模块负责控制无线充电过程;电机驱动模块负责驱动小车的电机,控制小车的运动。
4.2 模式切换模块软件设计
模式切换模块通过检测按键信号,实现不同模式的切换。软件设计包括按键检测、模式状态切换等步骤。模式切换模块软件流程图如图4-1所示。
<img src="https://example.com/mode_switch_flowchart.png" />
4.3 蓝牙控制模块软件设计
蓝牙控制模块通过USART接口与蓝牙模块进行通信,接收手机APP发送的控制指令,并控制小车的运动。软件设计包括蓝牙模块初始化、指令接收和解析等步骤。蓝牙控制模块软件流程图如图4-2所示。
<img src="https://example.com/bluetooth_control_flowchart.png" />
4.4 红外寻迹模块软件设计
红外寻迹模块通过读取红外循迹模块的反馈信号,判断小车前方的路线,并控制小车的运动方向。软件设计包括信号读取、路线判断和电机控制等步骤。红外寻迹模块软件流程图如图4-3所示。
<img src="https://example.com/infrared_tracking_flowchart.png" />
4.5 无线充电模块软件设计
无线充电模块负责控制无线充电过程,包括充电检测、充电控制等步骤。软件设计确保小车在无线充电模式下能够安全、稳定地进行充电。无线充电模块软件流程图如图4-4所示。
<img src="https://example.com/wireless_charging_flowchart.png" />
4.6 电机驱动模块软件设计
电机驱动模块通过PWM信号和GPIO信号控制L298N电机驱动模块,实现小车的运动控制。软件设计包括PWM信号生成、电机方向控制等步骤。电机驱动模块软件流程图如图4-5所示。
<img src="https://example.com/motor_drive_flowchart.png" />
第五章 手机端APP设计
5.1 APP功能设计
手机端APP采用“蓝牙调试器”APP,主要功能包括与蓝牙模块进行通信、发送控制指令等。用户可以通过APP控制小车的运动方向、速度等。
5.2 APP界面设计
APP界面设计简洁直观,包括连接蓝牙、控制按钮等元素。用户可以通过点击按钮发送控制指令,实现对小车的远程控制。
第六章 系统测试与分析
6.1 系统测试环境搭建
搭建系统测试环境,包括硬件电路连接、软件程序烧录和测试工具准备等。确保系统能够正常工作,各个模块能够正常通信。测试环境包括STM32开发板、红外循迹模块、蓝牙模块、无线充电模块、L298N电机驱动模块、2WD小车底盘和手机端APP等。
6.2 功能测试
6.2.1 模式切换测试
测试系统是否能够通过按键正确切换不同模式,包括循迹模式、蓝牙模式、无线充电模式等。测试结果表明,系统能够准确切换模式,且模式切换后小车能够按照预期的方式工作。
6.2.2 蓝牙控制测试
测试系统是否能够通过手机APP控制小车的运动。测试结果表明,手机APP能够与蓝牙模块正常通信,且能够准确控制小车的运动方向和速度。
6.2.3 红外寻迹测试
测试系统在循迹模式下是否能够根据红外循迹模块的反馈自动寻迹。测试结果表明,小车能够准确跟随路线行驶,寻迹效果良好。
6.2.4 无线充电测试
测试系统在无线充电模式下是否能够正常进行充电。测试结果表明,小车能够停止运动并进行无线充电,充电过程稳定可靠。
6.3 性能测试
对系统的稳定性、响应时间和功耗等性能指标进行测试。测试结果表明,系统稳定性较好,在长时间运行过程中未出现明显的故障;响应时间较短,能够快速响应用户的操作指令;功耗较低,适合嵌入式系统应用。
第七章 总结与展望
7.1 总结
本文设计并实现了一种基于STM32的无线充电小车,该小车具备蓝牙控制、红外寻迹和无线充电功能,通过按键可切换不同模式。经测试,小车各项功能运行正常,能够实现预期的设计目标。
7.2 展望
未来的研究可以进一步完善系统的功能,如增加更多的传感器模块,提高小车的智能化程度;优化无线充电模块的性能,提高充电效率;改进手机端APP的界面和功能,提升用户体验。同时,可以考虑将小车应用于实际场景中,如物流仓储、家庭服务等,为智能小车的发展提供更广阔的应用前景。


















 5626
5626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











