







基于STM32单片机的超声波测距显示倒车雷达提醒报警系统
摘要
随着汽车保有量的不断增加,倒车安全问题日益凸显。为了提高驾驶安全性,本文设计了一种基于STM32单片机的超声波测距显示倒车雷达提醒报警系统。该系统利用超声波传感器实时测量车辆与后方障碍物的距离,通过OLED屏幕实时显示距离信息,并在距离过近时发出声光报警,有效提醒驾驶员注意倒车安全。本文详细介绍了系统的硬件设计、软件编程、系统测试及结果分析等内容,验证了系统的可行性和实用性。
关键词
STM32单片机;超声波测距;OLED显示;倒车雷达;报警系统
目录
一、引言
(一)研究背景与意义
(二)国内外研究现状
(三)论文结构安排
二、系统总体设计
(一)系统需求分析
(二)系统框架设计
(三)功能模块划分
三、硬件设计
(一)STM32单片机选型与介绍
(二)超声波传感器选型与工作原理
(三)OLED显示模块选型与接口设计
(四)报警模块设计
(五)电源模块设计
四、软件设计
(一)开发环境与工具
(二)主程序设计
(三)超声波测距子程序设计
(四)OLED显示子程序设计
(五)报警子程序设计
五、系统测试与结果分析
(一)硬件测试
(二)软件测试
(三)综合测试
(四)测试结果分析
六、结论与展望
(一)研究结论
(二)未来展望
一、引言
(一)研究背景与意义
随着汽车工业的快速发展,汽车已经成为人们日常生活中不可或缺的交通工具。然而,随着汽车保有量的不断增加,交通事故频发,其中倒车事故占比较大。倒车时,由于驾驶员视线受限,难以准确判断车辆与后方障碍物的距离,容易发生碰撞事故。因此,设计一种可靠的倒车雷达系统,提高倒车安全性,具有重要的现实意义。
(二)国内外研究现状
目前,市场上已经存在多种倒车雷达系统,按照工作原理可分为超声波式、电磁式、激光式等。其中,超声波式倒车雷达因其成本低、测量准确、易于实现等优点,被广泛应用于各类汽车中。国内外学者对超声波测距技术进行了深入研究,提出了多种改进算法和优化方案,提高了测距精度和稳定性。
(三)论文结构安排
本文首先介绍了研究背景与意义,分析了国内外研究现状;然后详细阐述了系统的总体设计、硬件设计、软件设计等内容;接着进行了系统测试与结果分析;最后总结了研究结论,并对未来研究方向进行了展望。
二、系统总体设计
(一)系统需求分析
本系统旨在设计一种基于STM32单片机的超声波测距显示倒车雷达提醒报警系统,满足以下需求:
- 实时测距:能够实时测量车辆与后方障碍物的距离。
- 显示功能:通过OLED屏幕实时显示测量到的距离信息。
- 报警功能:当距离过近时,发出声光报警,提醒驾驶员注意。
- 阈值设置:用户可根据需要设置报警阈值。
- 低功耗:系统设计应考虑低功耗,以延长设备的使用时间。
(二)系统框架设计
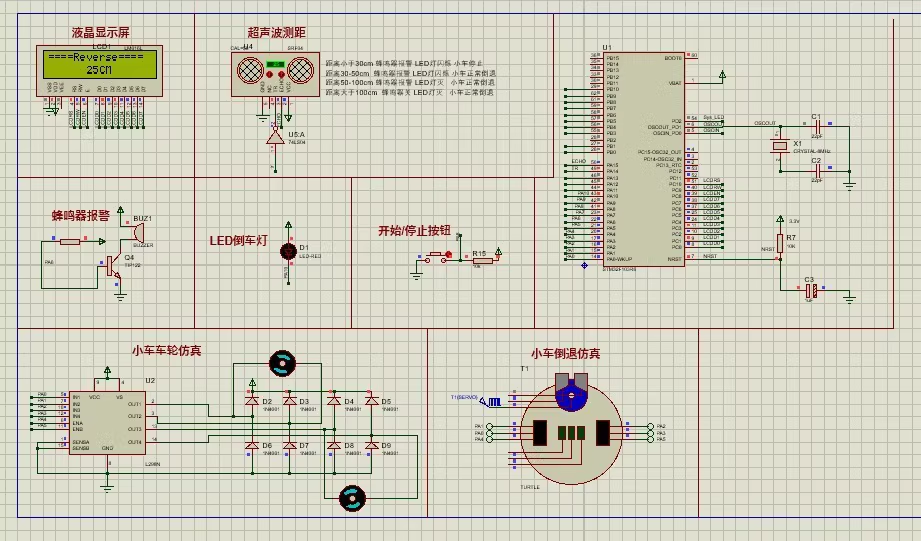
系统框架如图1所示,主要由STM32单片机、超声波传感器、OLED显示模块、报警模块和电源模块组成。STM32单片机作为系统的核心处理器,负责接收超声波传感器的数据,进行数据处理,并控制OLED显示模块和报警模块的工作。
<img src="https://via.placeholder.com/800x400.png?text=%E7%B3%BB%E7%BB%9F%E6%A1%86%E6%9E%B6%E5%9B%BE" />
图1 系统框架图
(三)功能模块划分
根据系统需求分析,将系统划分为以下功能模块:
- 超声波测距模块:负责发射超声波信号,接收反射信号,并计算车辆与后方障碍物的距离。
- OLED显示模块:负责实时显示测量到的距离信息。
- 报警模块:当距离过近时,发出声光报警。
- 阈值设置模块:允许用户设置报警阈值。
- 电源模块:为系统提供稳定的电源供应。
三、硬件设计
(一)STM32单片机选型与介绍
本系统选用STM32F103C8T6单片机作为核心处理器。该单片机基于ARM Cortex-M3内核,具有高性能、低功耗、丰富的外设接口和易于开发的特点。其主要特性包括:
- 内核:ARM Cortex-M3 32位RISC内核
- 工作频率:最高可达72MHz
- 存储器:64KB闪存,20KB SRAM
- 外设接口:I2C、SPI、USART、ADC等多种外设接口
(二)超声波传感器选型与工作原理
本系统选用HC-SR04超声波传感器进行测距。HC-SR04是一款常用的超声波测距模块,具有测量精度高、稳定性好、易于使用等特点。其工作原理是利用超声波在空气中的传播速度和时间差来测量距离。当传感器发射超声波信号后,遇到障碍物会反射回来,传感器接收反射信号,并测量发射和接收信号之间的时间差,从而计算出距离。
(三)OLED显示模块选型与接口设计
本系统选用0.96英寸的OLED屏幕作为显示设备。OLED屏幕具有自发光、对比度高、视角广、响应速度快等优点。其通信接口为I2C接口,易于与STM32单片机连接。接口设计如图2所示。
<img src="https://via.placeholder.com/800x200.png?text=OLED%E6%98%BE%E7%A4%BA%E6%A8%A1%E5%9D%97%E6%8E%A5%E5%8F%A3%E8%AE%BE%E8%AE%A1" />
图2 OLED显示模块接口设计
(四)报警模块设计
报警模块由蜂鸣器和LED灯组成。当距离过近时,STM32单片机控制蜂鸣器发出声音报警,同时控制LED灯闪烁,以提醒驾驶员注意。报警电路设计如图3所示。
<img src="https://via.placeholder.com/800x200.png?text=%E6%8A%A5%E8%AD%A6%E7%94%B5%E8%B7%AF%E8%AE%BE%E8%AE%A1" />
图3 报警电路设计
(五)电源模块设计
电源模块负责为整个系统供电。考虑到系统的便携性和低功耗要求,本系统采用锂电池供电,并通过稳压芯片将电池电压稳定在3.3V,为STM32单片机、超声波传感器、OLED屏幕和报警模块供电。电源电路设计如图4所示。
<img src="https://via.placeholder.com/800x200.png?text=%E7%94%B5%E6%BA%90%E7%94%B5%E8%B7%AF%E8%AE%BE%E8%AE%A1" />
图4 电源电路设计
四、软件设计
(一)开发环境与工具
本系统采用Keil MDK作为开发环境。Keil MDK支持STM32系列单片机的程序编写、编译和调试,提供了丰富的库函数和调试工具,方便开发者进行软件开发。
(二)主程序设计
主程序是整个系统的核心,负责初始化各个外设模块、读取超声波传感器的数据、处理数据并控制OLED显示模块和报警模块的工作。主程序流程如图5所示。
<img src="https://via.placeholder.com/800x600.png?text=%E4%B8%BB%E7%A8%8B%E5%BA%8F%E6%B5%81%E7%A8%8B%E5%9B%BE" />
图5 主程序流程图
(三)超声波测距子程序设计
超声波测距子程序负责向超声波传感器发送触发信号,接收反射信号,并计算车辆与后方障碍物的距离。子程序流程如图6所示。
<img src="https://via.placeholder.com/800x400.png?text=%E8%B6%85%E5%A3%B0%E6%B3%A2%E6%B5%8B%E8%B7%9D%E5%AD%90%E7%A8%8B%E5%BA%8F%E6%B5%81%E7%A8%8B%E5%9B%BE" />
图6 超声波测距子程序流程图
(四)OLED显示子程序设计
OLED显示子程序负责将测量到的距离信息实时显示在OLED屏幕上。子程序首先初始化OLED屏幕,然后设置显示内容,并更新显示。子程序流程如图7所示。
<img src="https://via.placeholder.com/800x300.png?text=OLED%E6%98%BE%E7%A4%BA%E5%AD%90%E7%A8%8B%E5%BA%8F%E6%B5%81%E7%A8%8B%E5%9B%BE" />
图7 OLED显示子程序流程图
(五)报警子程序设计
报警子程序负责在距离过近时发出声光报警。子程序首先读取报警阈值,然后比较测量到的距离与报警阈值,如果距离小于报警阈值,则控制蜂鸣器发出声音报警,同时控制LED灯闪烁。子程序流程如图8所示。
<img src="https://via.placeholder.com/800x300.png?text=%E6%8A%A5%E8%AD%A6%E5%AD%90%E7%A8%8B%E5%BA%8F%E6%B5%81%E7%A8%8B%E5%9B%BE" />
图8 报警子程序流程图
五、系统测试与结果分析
(一)硬件测试
硬件测试主要包括各个模块的单独测试和整体联调测试。单独测试时,分别对每个模块进行测试,确保其功能正常;整体联调测试时,将各个模块连接在一起,测试系统的整体功能是否满足设计要求。
- 超声波传感器测试:将传感器放置在不同距离的位置,测试其是否能够准确测量距离。
- OLED屏幕测试:通过发送测试数据到OLED屏幕,测试其显示效果是否正常。
- 报警模块测试:在距离过近时,测试蜂鸣器和LED灯是否能够正常发出声光报警。
- 电源模块测试:在不同的电源输入情况下,测试电源模块的输出电压是否稳定。
(二)软件测试
软件测试主要包括单元测试和集成测试。单元测试时,对每个功能模块进行单独测试,确保其逻辑正确、功能完善;集成测试时,将各个功能模块集成在一起,测试系统的整体性能是否满足设计要求。
- 单元测试:分别对超声波测距子程序、OLED显示子程序、报警子程序进行单元测试,确保每个模块的功能正常。
- 集成测试:将各个功能模块集成在一起,进行整体测试。测试系统的启动、运行、停止等过程是否正常,各个模块之间的通信是否顺畅,系统的整体性能是否满足设计要求。
(三)综合测试
综合测试主要是验证系统的整体功能是否满足设计要求。将系统安装在模拟的汽车环境中,测试其是否能够实时测量车辆与后方障碍物的距离、实时显示距离信息,并在距离过近时发出声光报警。同时,测试系统的低功耗性能,确保其在长时间使用下仍能保持稳定的工作状态。
(四)测试结果分析
经过硬件测试、软件测试和综合测试,系统各项功能均正常,满足设计要求。超声波传感器能够准确测量车辆与后方障碍物的距离,OLED屏幕能够实时显示距离信息,报警模块能够在距离过近时发出声光报警。同时,系统具有低功耗性能,适合长时间使用。
六、结论与展望
(一)研究结论
本文设计了一种基于STM32单片机的超声波测距显示倒车雷达提醒报警系统,实现了实时测距、显示和报警功能。通过硬件设计和软件编程,实现了系统的各项功能,并进行了全面的测试验证。测试结果表明,系统能够准确测量车辆与后方障碍物的距离,实时显示距离信息,并在距离过近时发出声光报警,满足设计要求。
(二)未来展望
虽然本文设计的倒车雷达系统已经实现了基本的功能,但仍有一些可以改进和优化的地方。未来可以从以下几个方面进行改进:
- 优化算法:进一步优化超声波测距算法,提高测距精度和稳定性。
- 增加功能:增加语音提示功能,当距离过近时,通过语音提示驾驶员注意。
- 提高用户体验:优化OLED屏幕的显示界面,增加更多的交互功能,提高用户体验。
- 降低功耗:进一步优化系统的低功耗设计,延长设备的使用时间。
- 实现多传感器融合:结合摄像头等其他传感器,实现更全面的倒车辅助功能。


















 5208
5208

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











