







做毕设的时候涉及到需要进行简单的遥控操作去检测机器人的运行状态,简单写个笔记
富斯官网:FlyskyRC
先附上富斯的IBUS协议:
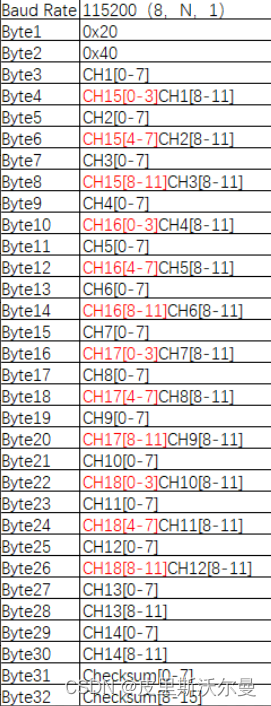
对于I6X来说,可以选择6-10通道的数据输出,摇杆对应频道1-4,5-6,7-10可以选择是旋钮还是拨杆,具体界面下图
在正式编写代码之前,让我们先对遥控器和接收机进行一下设置:
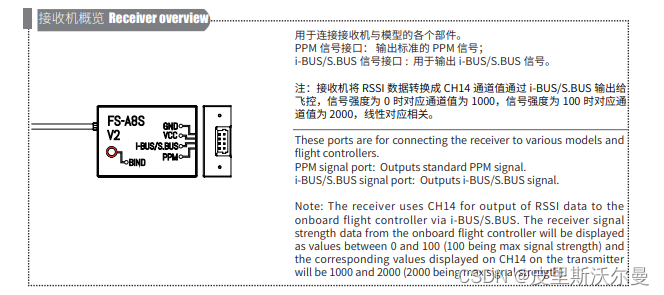
1.进行配对
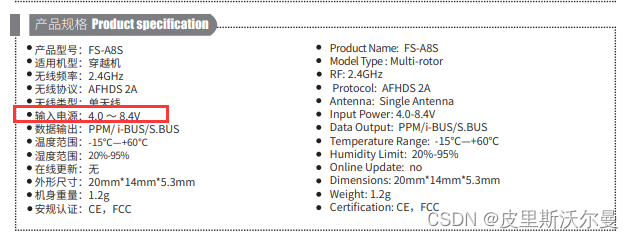
首先要对FS-A8S进行供电,VCC说明书上是4-8V,(实测用MCU的3.3V好像也行)
然后在VCC接通前(注意一定是接通前)按住Bind按钮,直到接收机变为快闪
做毕设的时候涉及到需要进行简单的遥控操作去检测机器人的运行状态,简单写个笔记
富斯官网:FlyskyRC
先附上富斯的IBUS协议:
对于I6X来说,可以选择6-10通道的数据输出,摇杆对应频道1-4,5-6,7-10可以选择是旋钮还是拨杆,具体界面下图
在正式编写代码之前,让我们先对遥控器和接收机进行一下设置:
首先要对FS-A8S进行供电,VCC说明书上是4-8V,(实测用MCU的3.3V好像也行)
然后在VCC接通前(注意一定是接通前)按住Bind按钮,直到接收机变为快闪

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 4679
4679





