






松灵移动机器人bunker在使用过程中发现遥控器无法操作机器人底盘移动,经过调试,发下通过机载计算机给底盘控制器发布指令可以控制底盘行走,由此得出应该是接收机出现问题,拆机后发现接收机发热严重,应该算坏了。
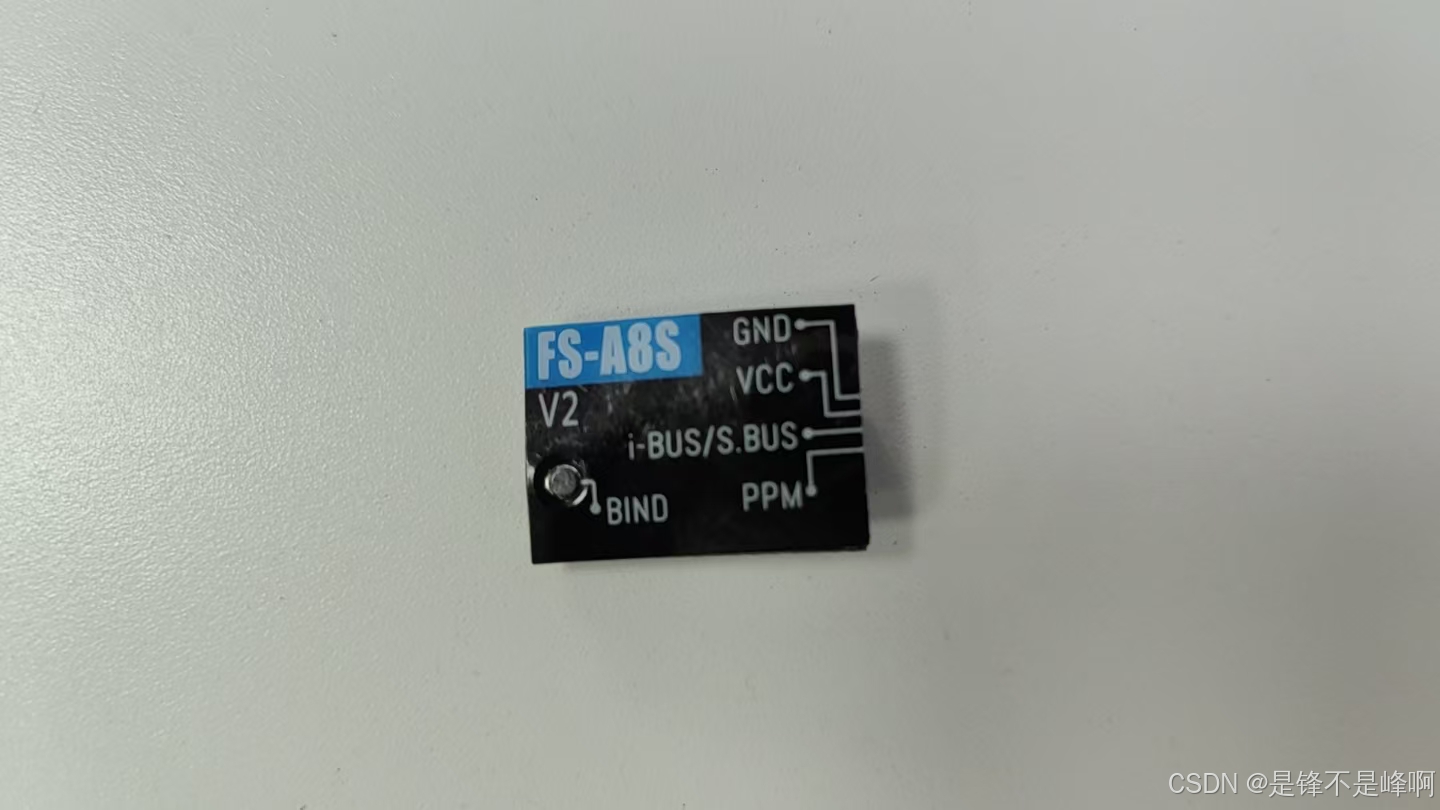
松灵机器人底盘用的Flysky FS-A8S 接收机,很小的一个,实物如下图所示:
用的富斯FSi6S10遥控器实物试下所示:

在接收机和遥控器对码过程中,一开始参照网上的教程,出现一些问题,摸索后,总结了一些关键问题,这里总结分享一下:
1、FS-A8S 接收机对码需要先断开接收机电源,按照对码按钮之后再接通电源,我一开始直接接通电源再按对码按钮,一致无法进入对码模式,进入对码模式后,指示灯会变成快速闪烁。
2、与此同时,再打开遥控器,这个顺序不能反了,否则也会对码失败。打开遥控器之后,解锁进图设置,进入SYSTEM界面,点击bind RX,此时开始对码,接收机对码成功后指示灯会变成常亮状态。
3、接收机与遥控器的模式匹配,接收机上有两种工作模式,i-BUS和S-BUS,同样的,遥控器上也有这两种模式,这个也要一致,否则无法使用。具体如何设置接收机和遥控器的输出模式呢?操作方法如下:
接收机输出模式切换:长按对码按键保持2S即可在i-BUS/S.BUS输出模式之间进行切换,
指示灯先灭1秒后快闪两次,表示成功切换至i-BUS输出模式;
指示灯先快闪两次后灭1秒,表示成功切换至S.BUS输出模式。
遥控器的输出模式切换可在触摸屏中进入设置切换。
以上就是本文的所有内容。

















 5272
5272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









