




介绍
舵机,全称为伺服马达(Servo Motor),是一种能够精确控制角度或位置的电动机。它广泛应用于模型制作、机器人技术、工业自动化等领域。舵机通过接收控制信号,将其转化为机械运动,从而实现精确的控制。
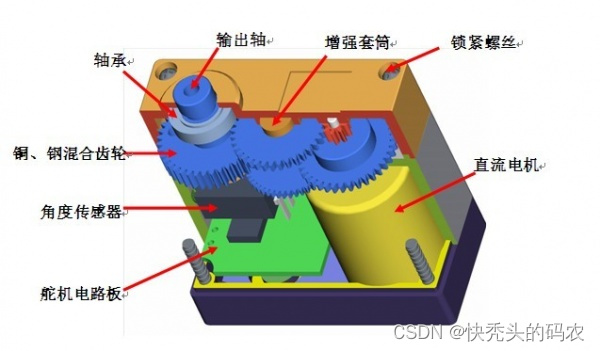
舵机主要由以下几个部分组成
- 电机:舵机的核心部分,用于提供动力。
- 减速齿轮组:将电机的快速旋转转化为较大力矩的慢速旋转。
- 位置反馈装置:通常是一个电位计(电位器),用于检测输出轴的位置,将其与期望位置进行比较,从而实现闭环控制。
- 控制电路:根据位置反馈信号,调节电机的功率和方向,以实现精确的位置控制。
工作原理

结构
控制原理
控制线意思

信号控制
180度
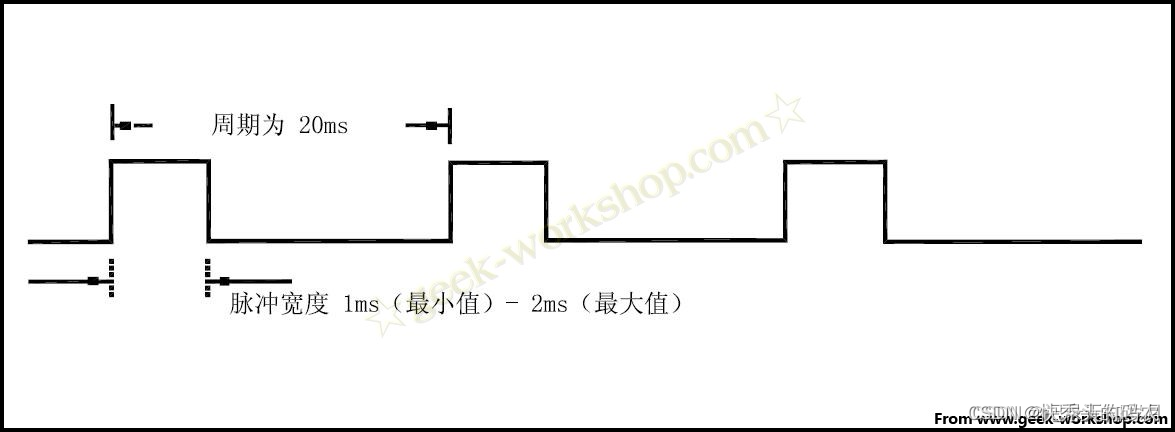
舵机的控制通常采用PWM信号,例如需要一个周期为20ms的脉冲宽度调制(PWM), 脉冲宽度部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。 当脉冲宽度为1.5ms时,舵机旋转至中间角度,大于1.5ms时 舵机旋转角度增大,小于1.5ms时舵机旋转角度减小。舵机分90°、180°、270°和360°舵机, 以180°的舵机为例来看看脉冲宽度与角度的关系,见下图所示。
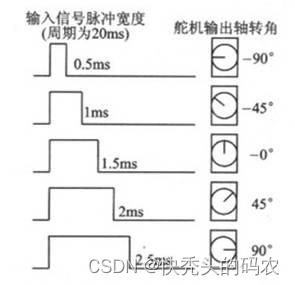
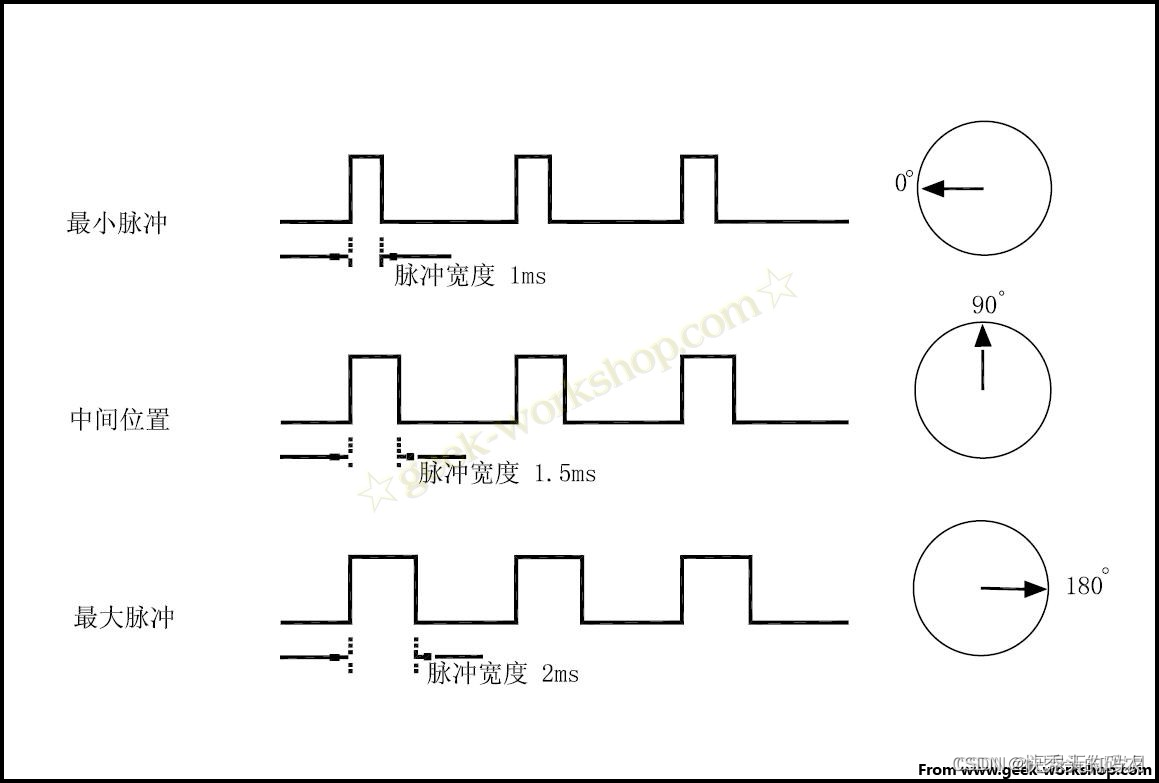
0.5ms对应0度,2.5ms对应最大 旋转角度,脉冲宽度与旋转角度也是线性关系。
360度
除了上面介绍的180°舵机之外,还有一种360°舵机。与180°舵机不同的是,360°舵机是无法控制角度的,它只能控制旋转方向和旋转速度。360°的舵机也是由脉冲宽度为20ms的PWM控制。高电平持续时间与舵机转向和转速的对应关系如下

舵机的重要的参数
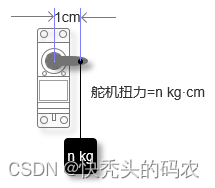
舵机扭矩的单位是KG*CM,这是一个扭矩的单位,可以理解为在舵盘上距离舵机轴中心水平距离1CM处, 舵机能够带动的物体重量,如下图所示。
硬件设计
本实验使用MG996R舵机来演示,这款舵机的规格如下。
-
尺寸:40.5*20*41mm
-
重量:55g
-
速度:4.8V@ 0.12±0.01sec/60°——6.0V@ 0.11±0.01sec/60°
-
扭力:4.8V@ 11kg-cm——6.0V@ 13kg-cm
-
电压:4.8V-6V
-
空载工作电流:220±20mA
-
堵转工作电流:2000±30mA
-
响应脉宽时间≤5usec
-
角度偏差:回中差≤1°,左右各45°误差≤3°。
-
齿轮:5级金属齿轮组
-
连接线长度:300mm
-
接口规格:JR/FP通用。
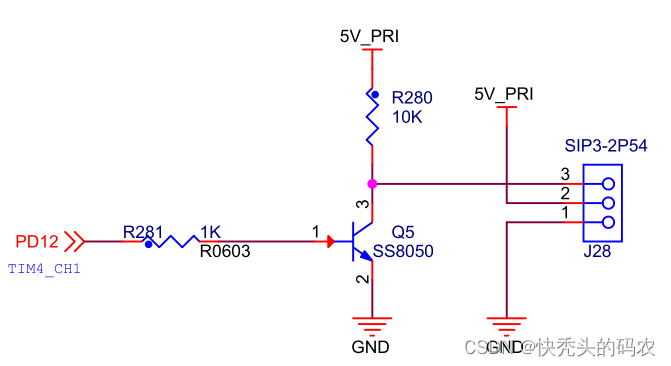
原理图

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









