







1 SENet
注:主要包括在一维卷积、二维卷积中的代码实现
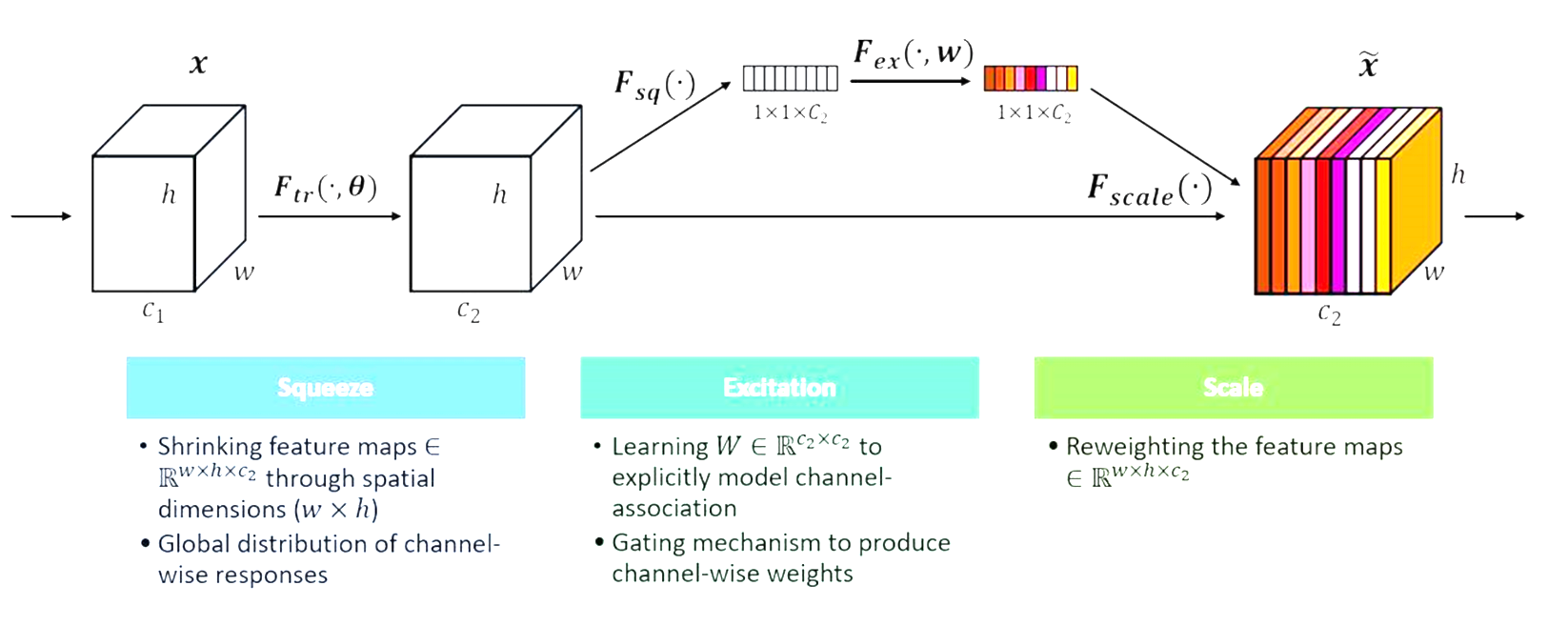
1.1一维卷积实现过程:code
import torch
import torch.nn as nn
class SELayer_1D(nn.Module):
"""Constructs a SE module.
Args:
channel: Number of channels of the input feature map
reduction: Reduction ratio for the Squeeze operation
"""
def __init__(self, channel, reduction=16):
super(SELayer_1D, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool1d(1) # 创建一个自适应平均池化层,将每个通道的特征图的长度缩减为1
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction), # 第一个线性层,将通道数从channel缩减为channel/reduction
nn.ReLU(inplace=True), # ReLU激活函数
nn.Linear(channel // reduction, channel), # 第二个线性层,将通道数从channel/reduction扩展到channel
nn.Sigmoid() # Sigmoid激活函数
)
def forward(self, x):
b, c, _ = x.size() # b为batch size,c为通道数,_是长度
y = self.avg_pool(x).view(b, c) # 将每个通道的特征图进行平均池化,维数变为(batch size, channel)
y = self.fc(y).view(b, c, 1) # 将特征图通过线性层和激活函数进行处理,并重新调整为(batch size, channel, 1)的形状
return x * y.expand_as(x) # 将特征图与该形状的y进行逐元素乘法,返回最终的特征图
import torch
import torch.nn as nn
class Model_1d(nn.Module):
def __init__(self):
super(Model_1d, self).__init__()
self.conv = nn.Conv1d(512, 128, kernel_size=3, padding=1)
self.se = SELayer_1D(128)
self.conv1 = nn.Conv1d(128, 32, kernel_size=3, padding=1)
def forward(self, x):
x = self.conv(x)
x = self.se(x)
x = self.conv1(x)
return xfrom torchsummary import summary
model = Model_1d()
summary(model,(512, 1024))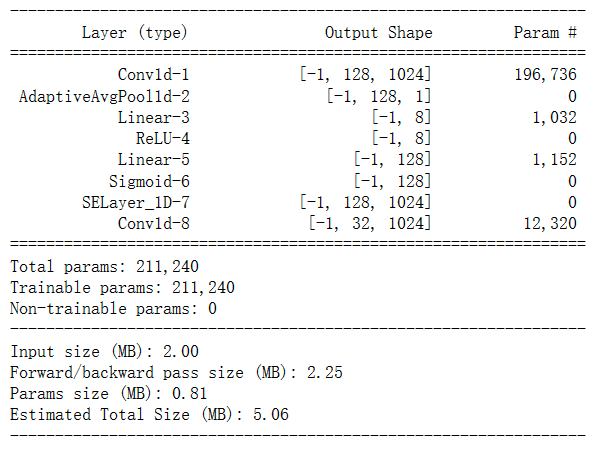
1.2二维卷积实现过程:code
import torch
import torch.nn as nn
class SELayer(nn.Module):
def __init__(self, in_planes, reduction=16):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(in_planes, in_planes // reduction),
nn.ReLU(inplace=True),
nn.Linear(in_planes // reduction, in_planes),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y.expand_as(x)
class ConvNet(nn.Module):
def __init__(self):
super(ConvNet, self).__init__()
self.conv = nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1)
self.selayer = SELayer(32)
def forward(self, x):
x = self.conv(x)
x = self.selayer(x)
return xfrom torchsummary import summary
model = ConvNet()
summary(model,(3,32,32))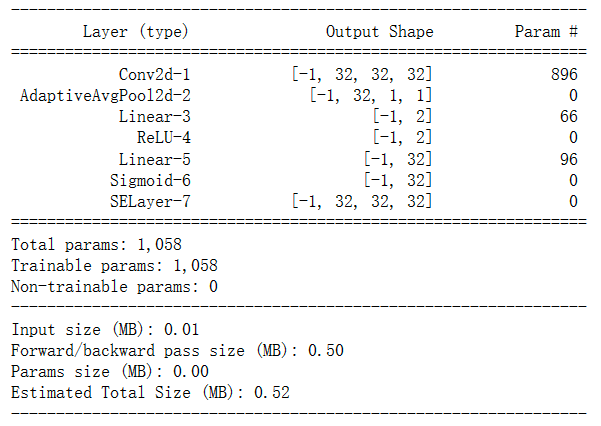
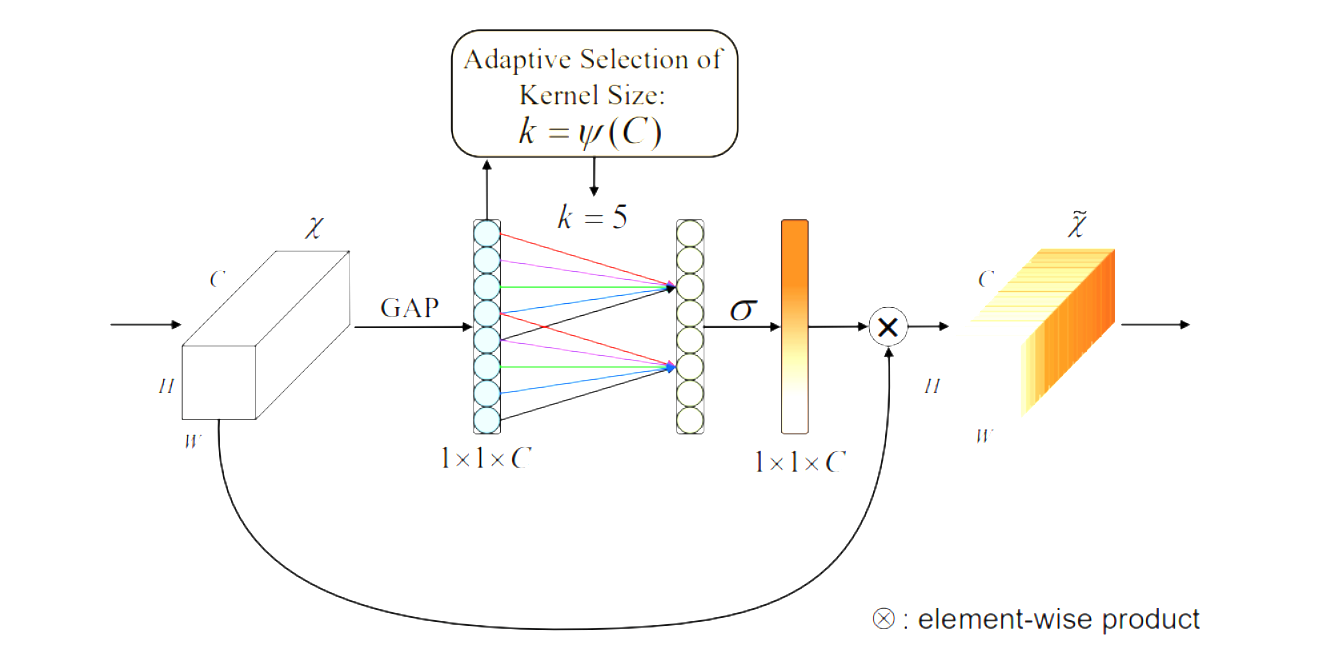
2 ECANet
注:主要包括在一维卷积、二维卷积中的代码实现
2.1一维卷积实现过程:code
import torch
import torch.nn as nn
class ECALayer1D(nn.Module):
def __init__(self, in_planes, reduction=16):
"""
ECALayer1D初始化方法
参数:
- in_planes: 输入的特征图的通道数
- reduction: 比率
"""
super(ECALayer1D, self).__init__()
# 平均池化层,取每一通道的平均值
self.avg_pool = nn.AdaptiveAvgPool1d(1)
# 全连接层,用于计算权重
self.fc = nn.Sequential(
# 第一层线性层,将特征图的通道数除以reduction
nn.Linear(in_planes, in_planes // reduction),
# ReLU激活函数
nn.ReLU(inplace=True),
# 第二层线性层,将输出的结果乘以in_planes
nn.Linear(in_planes // reduction, in_planes),
)
def forward(self, x):
"""
前向传播函数
参数:
- x: 输入的特征图
"""
# 获取batch_size,通道数和长度
b, c, l = x.size()
# 对特征图进行平均池化,并将结果reshape成(batch_size,通道数)的形式
y = self.avg_pool(x).view(b, c)
# 计算权重
y = self.fc(y).view(b, c, 1)
# 对权重进行ReLU激活,权重<0的位置赋值为0
y = torch.where(y >= 0, y, torch.zeros_like(y))
# 将权重扩展到与特征图相同的大小并乘以特征图
return x * y.expand_as(x)import torch
import torch.nn as nn
class Model_1d(nn.Module):
def __init__(self):
super(Model_1d, self).__init__()
self.conv = nn.Conv1d(512, 128, kernel_size=3, padding=1)
self.eca = ECALayer1D(128)
self.conv1 = nn.Conv1d(128, 32, kernel_size=3, padding=1)
def forward(self, x):
x = self.conv(x)
x = self.eca(x)
x = self.conv1(x)
return xfrom torchsummary import summary
model = Model_1d()
summary(model,(512, 1024))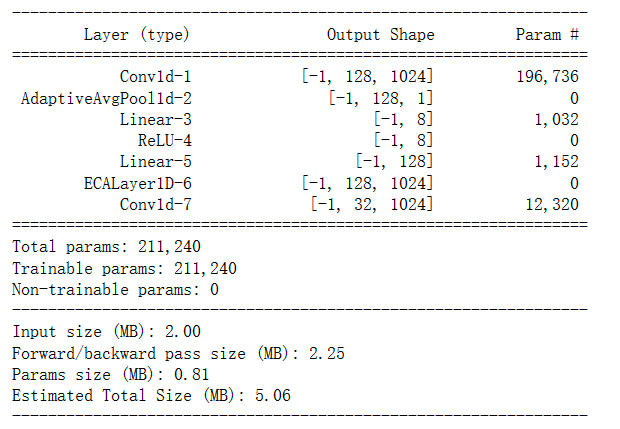
2.2二维卷积实现过程:code
import torch
import torch.nn as nn
class ECALayer(nn.Module):
def __init__(self, in_planes, reduction=16):
super(ECALayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(in_planes, in_planes // reduction),
nn.ReLU(inplace=True),
nn.Linear(in_planes // reduction, in_planes),
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
y = torch.where(y >= 0, y, torch.zeros_like(y))
return x * y.expand_as(x)class ConvNet(nn.Module):
def __init__(self):
super(ConvNet, self).__init__()
self.conv = nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1)
self.ecalayer = ECALayer(32)
def forward(self, x):
x = self.conv(x)
x = self.ecalayer(x)
return xfrom torchsummary import summary
model = ConvNet()
summary(model,(3,32,32))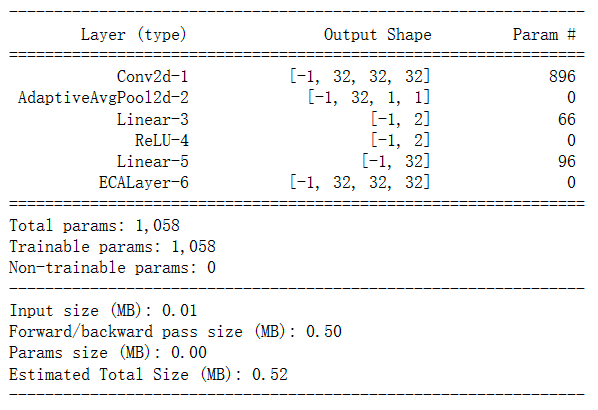















 7941
7941











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









