







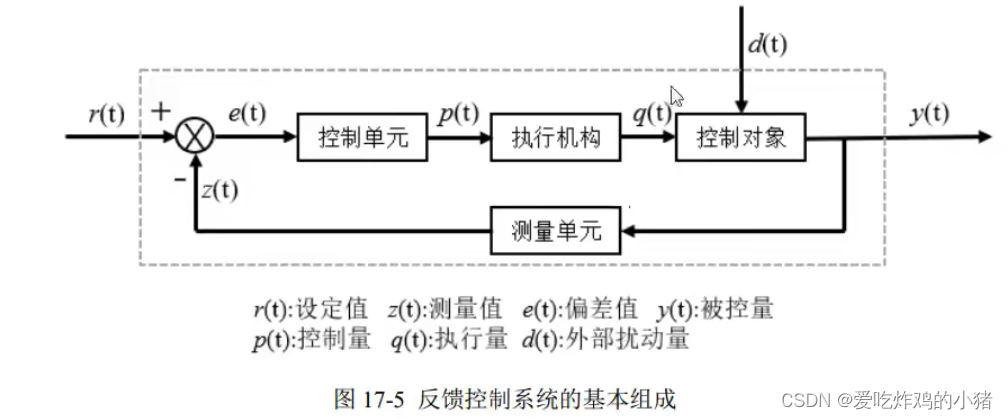
基本的闭环控制图如下:
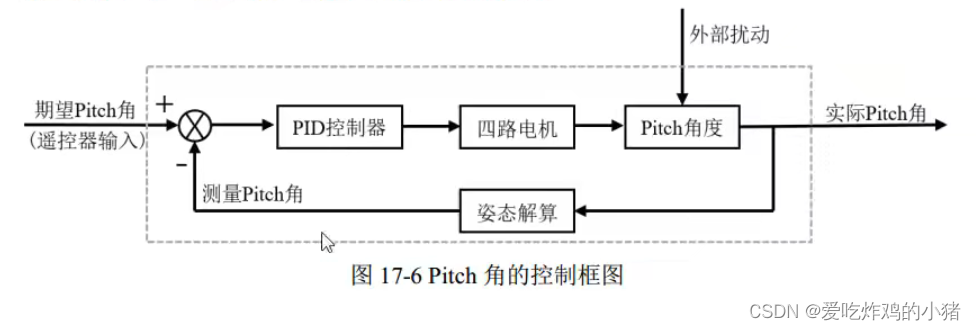
将各个控制单元对应到无人机上,可以做出Pitch角的反馈控制框图:
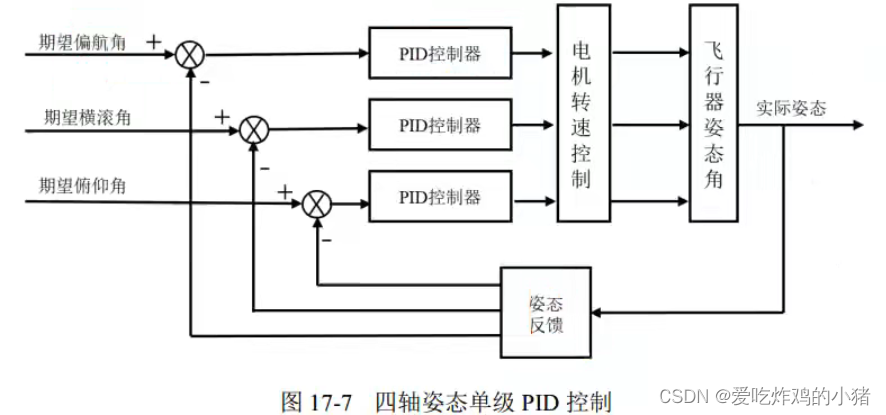
四轴姿态PID控制
单级控制框图如下:
串级控制框图如下:
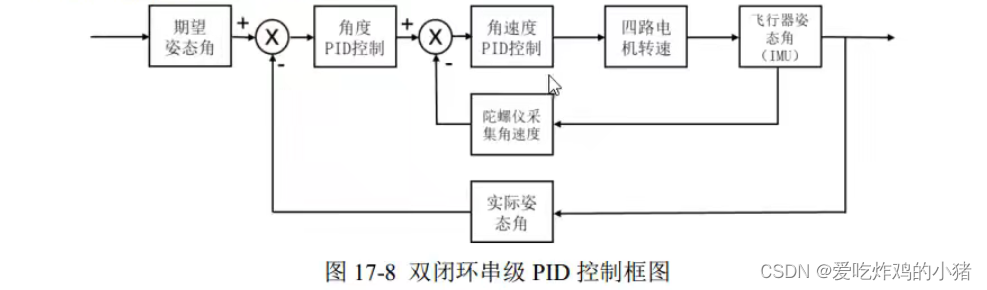 主要是在角度控制的基础上,增加了角速度控制。期望姿态角与姿态结算出来的角度进行角度PID控制,输出的角度值,是离散型数据。又因为w(角速度)=a(角度)/t(时间)。所以可以认为输入的也是角速度。于是就实现了外环PID值作为内环PID的期望值目的。再结合陀螺仪比较精准的采集角速度的原理。内环的角速度控制可以保证飞行器测量值迅速的达到期望值。
主要是在角度控制的基础上,增加了角速度控制。期望姿态角与姿态结算出来的角度进行角度PID控制,输出的角度值,是离散型数据。又因为w(角速度)=a(角度)/t(时间)。所以可以认为输入的也是角速度。于是就实现了外环PID值作为内环PID的期望值目的。再结合陀螺仪比较精准的采集角速度的原理。内环的角速度控制可以保证飞行器测量值迅速的达到期望值。
这样一来就大大缓解了单角度环控制,由于飞机的电机转速与升力不成正比而出现的失衡(比如说在目标位置前后,左右偏移),跟随滞后等等问题。
四轴姿态控制原理四路电机动力分配
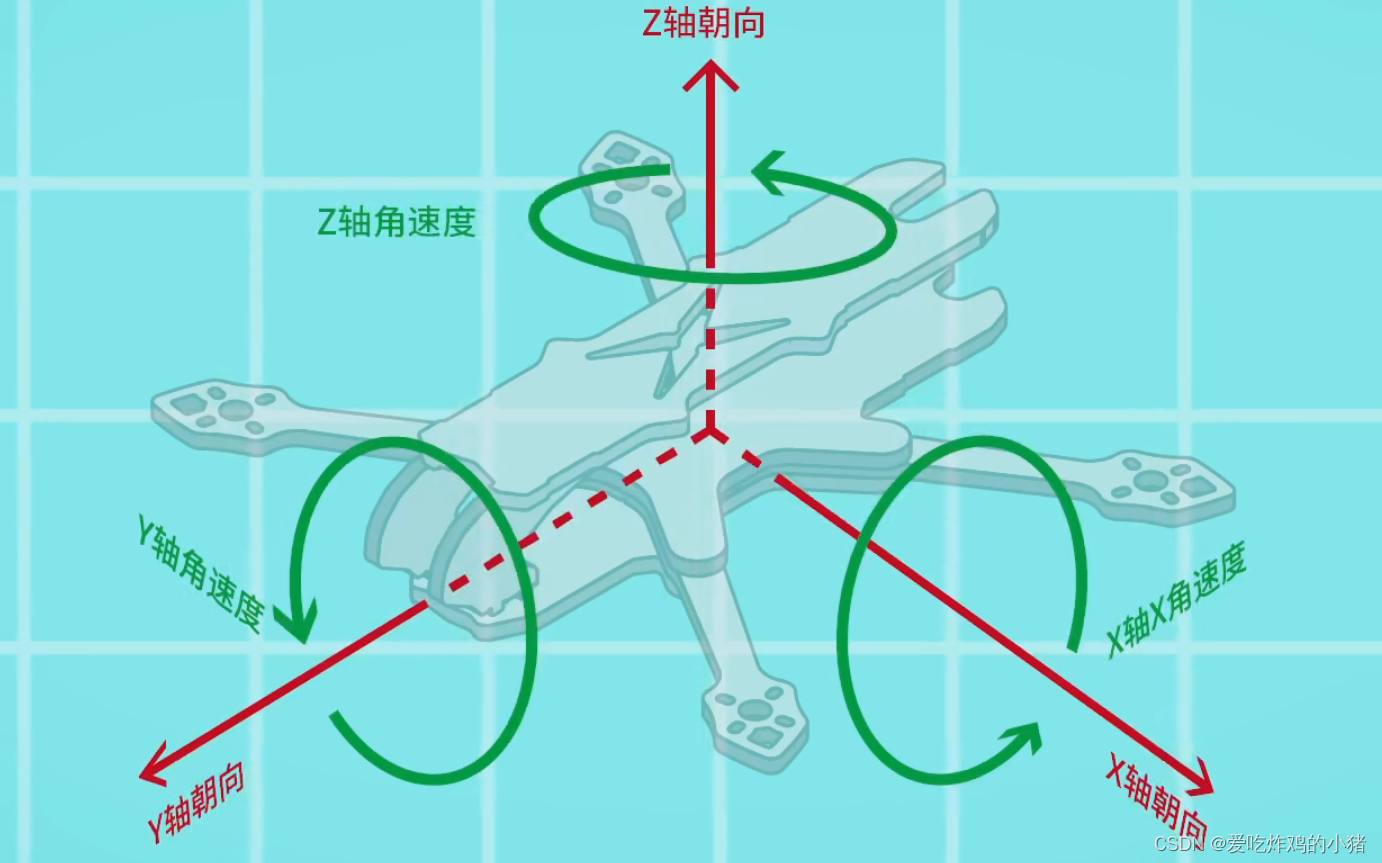
PID计算的结果最终是要输出给电机的,所以我们要将三个姿态角的控制输出正确的分配给四个电机。顺时针开始,从第四象限开始,依次是M1,M2,M3,M4四个电机。(注意上面给的参考图片,左下侧是机头方向)
实现左右横滚运动的时候:(Roll)
需要M1,M4的转速增大。M2,M3电机的转速减少。(或者反着来,运动方向相反)并且为了使得飞行的稳定性。输出的增量和减少量是一致:
MOTOR1 += + pidRateX.out
MOTOR2 += - pidRateX.out
MOTOR3 += - pidRateX.out
MOTOR4 += + pidRateX.out实现前后俯仰运动的时候:(Pitch)
需要M3,M4的转速增大。M1,M2电机的转速减少。(或者反着来,运动方向相反)同样的为了使得飞行的稳定性。输出的增量和减少量是一致:
MOTOR1 += - pidRateY.out
MOTOR2 += - pidRateY.out
MOTOR3 += + pidRateY.out
MOTOR4 += + pidRateY.out实现前后偏航运动的时候:(Yaw)
实现原理:
主要是运用反扭矩:四轴无人机有一个特点,玩过无人机的人也应该知道,就是两个斜对角方向的旋翼旋转方向是不同的。这样使得顺时针方向与逆时针方向产生的反扭矩相互抵消。飞机不至于原地转圈。
在一些小的飞行器上可能会直接在两个对角线上安转正浆与反浆。这样直接控制四个电机旋转方向相同就行。
什么是反扭矩?
用直升机的例子解释:
直升机飞行主要靠旋翼产生的拉力。当旋翼由发动机通过旋转轴带动旋转时,旋翼给空气以作用力矩(或称扭矩),空气必然在同一时间以大小相等、方向相反的反作用力矩作用于旋翼(或称反扭矩),从而再通过旋翼将这一反作用力矩传递到直升机机体上。如果不采取措施予以平衡,那么这个反作用力矩就会使直升机逆旋翼转动方向旋转。所以直升机尾巴上的小螺旋桨就是用来抵消反扭矩,进而起到控制直升机方向的作用。
所以如果我们要飞机向逆时针方向偏航,是不是就要增大逆时针方向上的反扭矩,减少顺时针方向的反扭矩。即增大顺时针旋转旋翼的转速,并减少逆时针旋转旋翼的转速。对应到图中需要M2,M4的转速增大。M1,M3电机的转速减少。(或者反着来,运动方向相反)同样的为了使得飞行的稳定性。输出的增量和减少量是一致:
MOTOR1 += -pidRateZ.out;
MOTOR2 += + pidRateZ.out;
MOTOR3 += - pidRateZ.out;
MOTOR4 += + pidRateZ.out ;将三个式子加和:
MOTOR1 += + pidRateX.out - pidRateY.out -pidRateZ.out;
MOTOR2 += - pidRateX.out - pidRateY.out + pidRateZ.out;
MOTOR3 += - pidRateX.out + pidRateY.out - pidRateZ.out;
MOTOR4 += + pidRateX.out + pidRateY.out + pidRateZ.out;DIY需要注意的一点是,可能自己DIY的飞机的角速度方向与这个代码并不是一致的,原因是自己DIY的飞控的mup6050的方向不一定相同,所以导致一个问题就是:不同飞行器x轴加速度,y轴加速度,z轴加速度的正方向不一样。
那么在测试调参的时候,一般是俯仰角,翻滚角,偏航角一个一个的调整。避免变量过多分不清楚的情况。

















 1976
1976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









