







题目介绍:
主动稳定云台是一种电子与机械结合的装置,在云台的基座姿态发生变化时,云台能够检 测到姿态变化,并驱动相应的运动部件使云台的的输出保持稳定。运用于坦克、战舰上,主动 稳定云台可以在坦克战舰行进中保持炮塔的姿态稳定,提高射击精度;运用于摄影则可以保证 摄影师在跑动过程摄像机的稳定,使拍摄的画面稳定。 本课题的主要工作:使用高性能单片机 ESP32 为控制器,设计并实现一个主动平衡云台。 电路结构如下图:
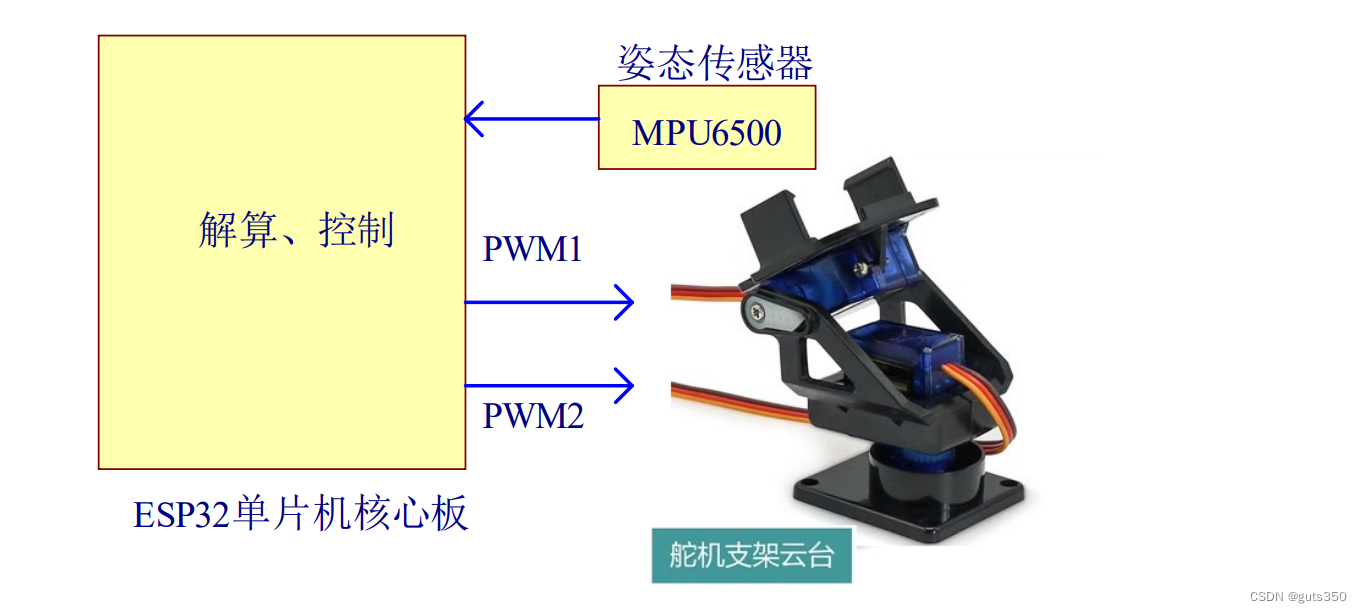
六轴(三轴重力加速度和三轴陀螺仪)姿态传感器型号为 MPU6500,安装在云台的顶部, 加速度及陀螺仪数据通过数据总线传输给单片机,单片机对数据进行解算,求解出云台输出端 的倾斜角度,产生特定占空比的 PWM 波给舵机,使舵机转动,调平云台输出端。 课题的工作主要集中在编写 ESP32 上的数据读取、解算、控制程序,另外还有基本的电 路设计、电路板设计、焊接、调试。 一、基本要求 1. 设计并制作专用 PCB, ESP32 模块通过插针和插座安装到所做 PCB 上。 2. MPU6500 模块固定在云台顶端,用杜邦线引出并插到所做 PCB 的插座上。 3. 舵机线插到所做 PCB 的插座上。 4. 云台顶端固定安装一个点状激光头,光点照射在 3 米外的墙上,云台底座滚动 90 度范 围内,光点在垂直范围偏移不超过+10 厘米。偏移距离越小越好。 5. 响应速度越快越好。 6. 整机使用 USB 供电。
器件说明:
开发板esp32见:esp32
MPU-6500:六轴运动处理传感器,在大小为3.0×3.0×0.9mm的芯片上,通过QFN 封装(无引线方形封装),集成了 3 轴 MEMS 陀螺仪,3 轴 MEMS加速度计,以及一个数字运动处理器 DMP( Digital Motion Processor)。还可以通过辅助I2C端口与多个非惯性数字传感器(例如压力传感器、磁力计)进行连接。
舵机SG90:位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其本质是一个伺服电机。G90 的主要电气参数:使用电压: 4.8V - 6V,尺寸: 221.5mm x 11.8mm x 22.7mm,重量: 9g,角度范围:0-180°,舵机的转动的角度是通过调节 PWM(脉冲宽度调制)信号的占空比来实现的,标准 PWM(脉冲宽度调制)信号的周期固定为 20ms(50Hz)
重要库函数:
1.采用了mpu6500自带的dmp进行姿态演算。可以快速方便地计算出四元数,重力加速度和三个姿态角yaw,roll,pitch。避免了繁琐复杂的姿态角计算,并且精确度较高。
注:esp32解算数据(欧拉角计算与舵机偏转角度的计算)与控制信号输出算法:通过mpu6500自带的dmp,可以快速计算出四元数,重力向量和三个姿态角yaw,roll,pitch。且yaw开始时为随机值,故跳过自校准过程的前300个读数。通过esp32servo库中的read函数可以读取舵机当前的角度。在水平方向上,用舵机当前角度加上yaw角进行补偿,即可保持水平方向上的稳定。在竖直方向上,用舵机当前角度加上roll角进行补偿,即可保持竖直方向上的稳定。
2.本方案实现控制云台采用esp32servo库中的函数write和read:使云台能够转到指定的角度和可以读出云台现在的角度。
引脚锁定:
MPU6500只使用VCC、GND 、SCL(接esp32的引脚22)、SDA(接esp32的引脚21)四个引脚。
舵机的三根线全部使用,分别接Vin,GND,ESP32的D12,D13引脚(输出pwm信号控制两个舵机转动)
本贴不给出pcb设计。参考帖见评论。
主要代码(并不完整):
void setup()
{
Wire.begin();
Wire.setClock(400000);
Serial.begin(115200);
mpu.initialize();
mpu.dmpInitialize();
mpu.CalibrateAccel(6);
mpu.CalibrateGyro(6);
mpu.PrintActiveOffsets();
mpu.setDMPEnabled(true);
// 分配硬件定时器,有0,1,2,3四个定时器
ESP32PWM::allocateTimer(0);
// 设置频率
my_servo.setPeriodHertz(50);
my_servo1.setPeriodHertz(50);
// 关联 servo 对象与 GPIO 引脚,设置脉宽范围
my_servo.attach(SERVO_PIN, MIN_WIDTH, MAX_WIDTH);
my_servo1.attach(SERVO_PIN1, MIN_WIDTH, MAX_WIDTH);
my_servo1.write(90);
my_servo.write(0);
delay(50);
}
void loop()
{
if (mpu.dmpGetCurrentFIFOPacket(fifoBuffer))
{
mpu.dmpGetQuaternion(&q, fifoBuffer);// 获取四元数数据
mpu.dmpGetGravity(&gravity, &q);//获取重力向量
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
static const float dt = 8.0 / 1000;
static const float ZERO_OFFSET_COUN (1 / dt);
static int g_GetZeroOffset = 0;
static float gyroZ_offset = 0.0f;
ypr[0]=ypr[0] * 180 / M_PI;
ypr[1]=ypr[1] * 180 / M_PI;
ypr[2]=ypr[2] * 180 / M_PI;
if(j<=300)
{
correct=ypr[0];
correct2=ypr[2];
temp1=correct;
j++;
}
else
{
ypr[0]=ypr[0]-correct;
ypr[2]=ypr[2]-correct2;
// 间隔8ms一次采样,统计125次,共1秒时间
if (g_GetZeroOffset++ < ZERO_OFFSET_COUN)
gyroZ_offset += ypr[0] * dt; // 每次8%积分,累计加权125次
// 除去零偏
if (g_GetZeroOffset > ZERO_OFFSET_COUN) // 统计完零偏后开始累计偏角
ypr[0] -= gyroZ_offset;
int targetAngle =my_servo.read()+ypr[2];
my_servo.write(targetAngle);
// 将目标位置限制在舵机允许范围内
int targetAngle1 = my_servo1.read() + ypr[0];
if(targetAngle1<=180&&targetAngle1>=-180)
my_servo1.write(targetAngle1);
delay(50);
}
}
}
源文件请看个人主页的资源。
参考文章和视频:
(该视频主要是看的24节舵机实验,使用的舵机第三方库文件):
【2023年最新 ESP32 Arduino 教程(持续更新中)】 https://www.bilibili.com/video/BV1RM4y1a7J5/?p=24&share_source=copy_web&vd_source=9332b8fc5ea8d349a54c3989f6189fd3
在Arduino IDE上开发ESP32(离线安装SDK):
https://blog.csdn.net/fengcan/article/details/128317803
ESP32引脚介绍(本设计基本只用考虑输入输出引脚):
https://blog.csdn.net/m0_46509684/article/details/129105888?spm=1001.2014.3001.5506
MPU6500和6050是差不多的,而6050资料更多,下面大部分是6050的参考:
MPU6050简介
https://blog.csdn.net/u012065954/article/details/128443231?spm=1001.2014.3001.5506
https://blog.csdn.net/weixin_52801934/article/details/126232654?spm=1001.2014.3001.5506
https://blog.csdn.net/qq_38972634/article/details/116786421?spm=1001.2014.3001.5506
MPU6050第三方库下载和使用
https://blog.csdn.net/tonyiot/article/details/104914431?spm=1001.2014.3001.5506


















 2262
2262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











