






下载Proteus并完成一个C15程序设计与仿真
1、下载并安装proteus
链接:https://pan.baidu.com/s/1eURfI-nSSXHQfL1cgaSdKg
提取码:lse6
将下载后的安装包解压缩,打开 Proteus 8.9 SP2 Pro 应用程序。
2、51程序设计和仿真
点击新建工程:

选择创造固件项目,controller选择80C51,下一步:

点击完成:
依次添加AT89C51,LED-YELLOW,RES原件
放置AT89C51芯片,8个LED灯及8个内阻

使用 LBL 为支线标记编号,连接到主线的支线,电阻阻值改为300,需要对支线进行编号才能正常连接,否则后面需要正常实验成功

3、编写51程序
打开keil软件,点击project,选择New uVision Project

选择AT89C51芯片,点击ok

编写main.c文件

点击保存,右键点击Source Group 1,选择Add Existing Files to Group ‘Source Group 1’:

点击output,勾选Create HEX File:

点击编译按钮,进行编译,编译成功并生成了两个头文件
4、开始仿真
回到Proteus软件的原理图内,双击 AT89C51 芯片后,在弹出的窗口的 Program File 一栏从刚才 keil 软件编译后的路径中添加 .hex 文件,再点击 OK 。

点击调试,开始仿真

使用MDK编译stm32简单程序
1、新建工程
打开 Keil uVision5 ,新建一个工程。
 载入工程后,窗口内选择STM32芯片,并保存
载入工程后,窗口内选择STM32芯片,并保存

勾选相应的选项,并点击OK,这样工程创建完毕

2、创建main.c
在左上角点击new新建文件,将以下代码复制进Text1文本框内
//宏定义,用于存放stm32寄存器映射
#define PERIPH_BASE ((unsigned int)0x40000000)//AHB
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
#define GPIOA_BASE (APB2PERIPH_BASE + 0x0800)
//GPIOA_BASE=0x40000000+0x10000+0x0800=0x40010800,该地址为GPIOA的基地址
#define GPIOB_BASE (APB2PERIPH_BASE + 0x0C00)
//GPIOB_BASE=0x40000000+0x10000+0x0C00=0x40010C00,该地址为GPIOB的基地址
#define GPIOC_BASE (APB2PERIPH_BASE + 0x1000)
//GPIOC_BASE=0x40000000+0x10000+0x1000=0x40011000,该地址为GPIOC的基地址
#define GPIOD_BASE (APB2PERIPH_BASE + 0x1400)
//GPIOD_BASE=0x40000000+0x10000+0x1400=0x40011400,该地址为GPIOD的基地址
#define GPIOE_BASE (APB2PERIPH_BASE + 0x1800)
//GPIOE_BASE=0x40000000+0x10000+0x0800=0x40011800,该地址为GPIOE的基地址
#define GPIOF_BASE (APB2PERIPH_BASE + 0x1C00)
//GPIOF_BASE=0x40000000+0x10000+0x0800=0x40011C00,该地址为GPIOF的基地址
#define GPIOG_BASE (APB2PERIPH_BASE + 0x2000)
//GPIOG_BASE=0x40000000+0x10000+0x0800=0x40012000,该地址为GPIOG的基地址
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define LED0 MEM_ADDR(BITBAND(GPIOA_ODR_Addr,8))
//#define LED0 *((volatile unsigned long *)(0x422101a0)) //PA8
//定义typedef类型别名
typedef struct
{
volatile unsigned int CR;
volatile unsigned int CFGR;
volatile unsigned int CIR;
volatile unsigned int APB2RSTR;
volatile unsigned int APB1RSTR;
volatile unsigned int AHBENR;
volatile unsigned int APB2ENR;
volatile unsigned int APB1ENR;
volatile unsigned int BDCR;
volatile unsigned int CSR;
} RCC_TypeDef;
#define RCC ((RCC_TypeDef *)0x40021000)
//定义typedef类型别名
typedef struct
{
volatile unsigned int CRL;
volatile unsigned int CRH;
volatile unsigned int IDR;
volatile unsigned int ODR;
volatile unsigned int BSRR;
volatile unsigned int BRR;
volatile unsigned int LCKR;
} GPIO_TypeDef;
//GPIOA指向地址GPIOA_BASE,GPIOA_BASE地址存放的数据类型为GPIO_TypeDef
#define GPIOA ((GPIO_TypeDef *)GPIOA_BASE)
void LEDInit( void )
{
RCC->APB2ENR|=1<<2; //GPIOA 时钟开启
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;
}
//粗略延时
void Delay_ms( volatile unsigned int t)
{
unsigned int i,n;
for (n=0;n<t;n++)
for (i=0;i<800;i++);
}
int main(void)
{
LEDInit();
while (1)
{
LED0=0;//LED熄灭
Delay_ms(500);//延时时间
LED0=1;//LED亮
Delay_ms(500);//延时时间
}
}
复制粘贴完后,点击左上角保存按钮,在弹出的窗口内,输入文件名main.c
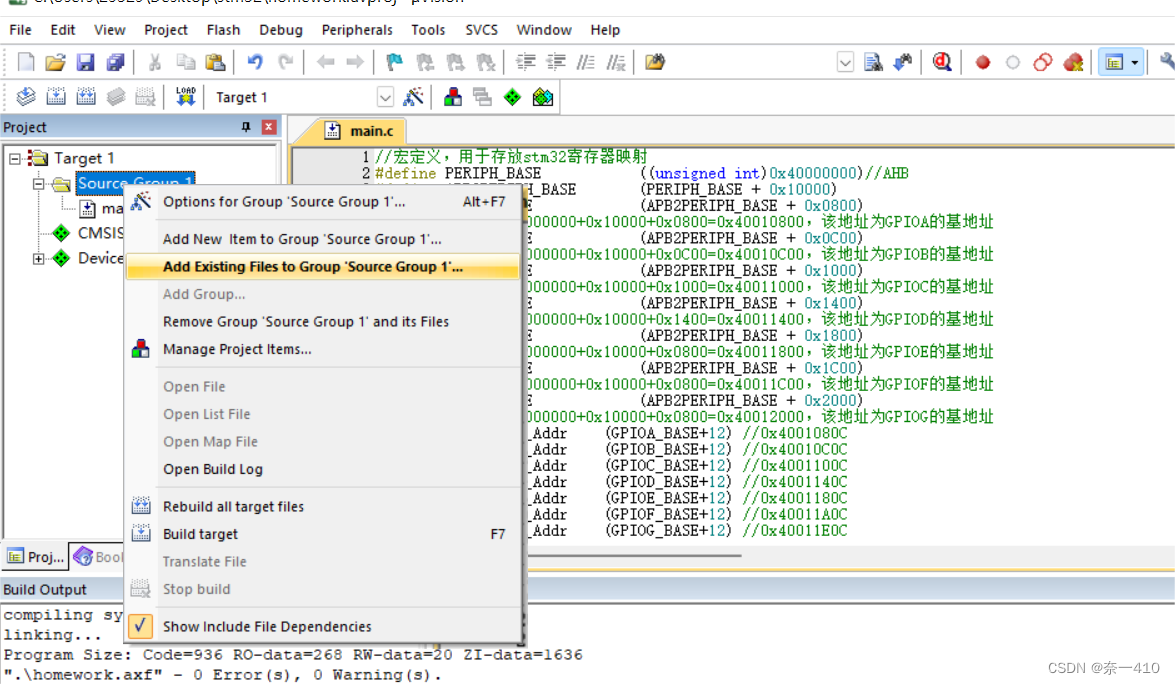
右键点击 Source Group 1 ,然后点击 Add Existing Files to Group在工程下添加main.c文件
3、编译程序
点击左上角编译按钮,开始编译程序。

4.stm32程序仿真调试
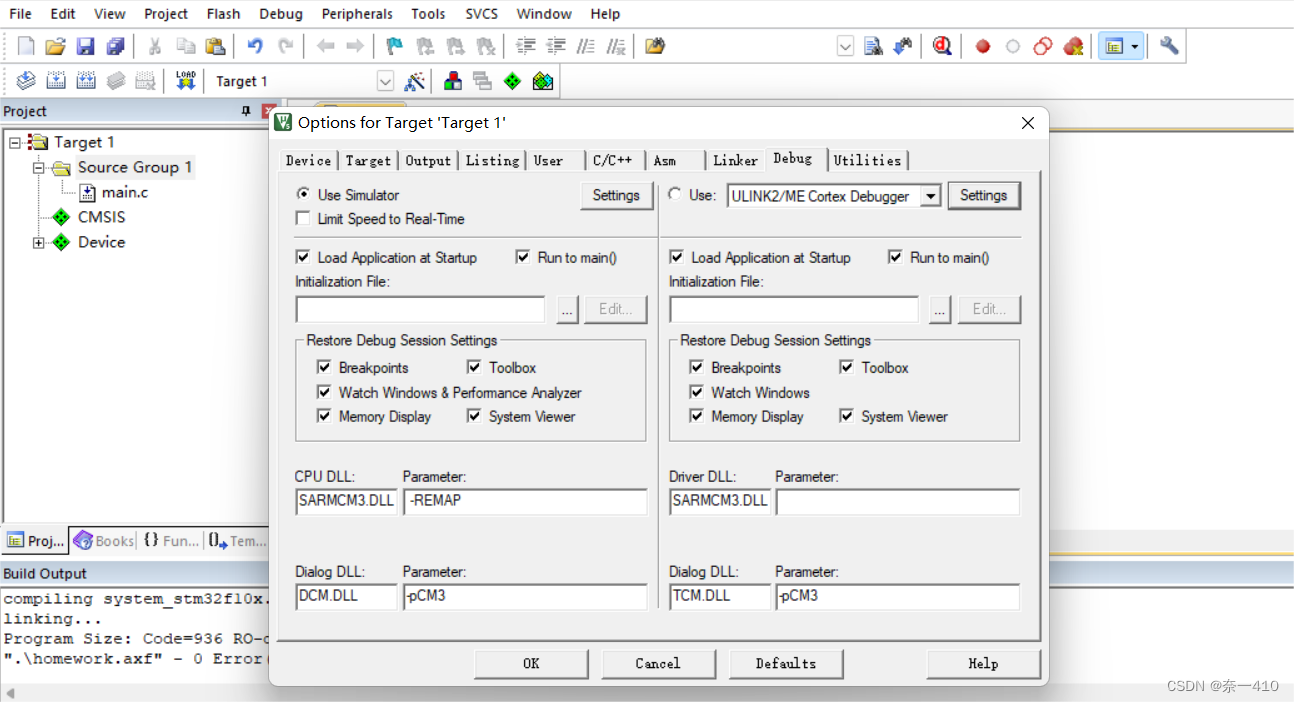
点击工具栏下的魔法棒,然后在弹出的窗口内,点击 Debug,勾选 Use Simulator ,再选择 ULINK2/ME Cortex Debugger 。
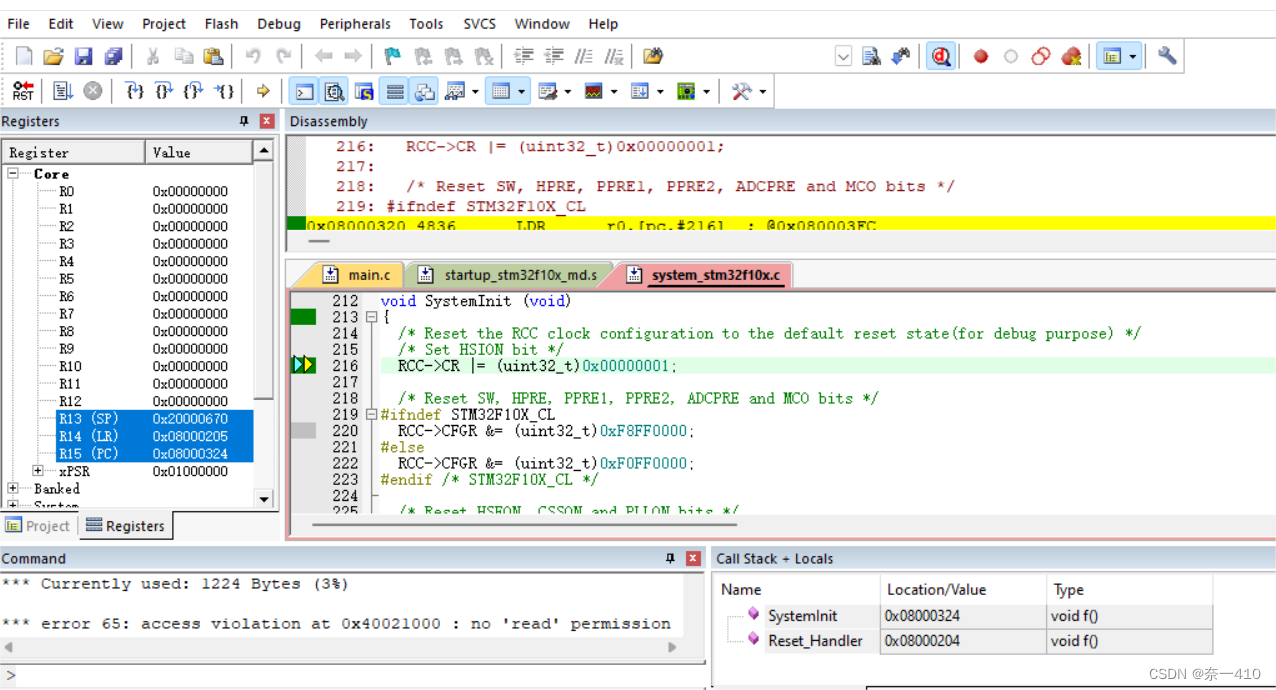
选中带有红色d的放大镜开始调试,在左边工具栏的括号处就是仿真调试所需要的调试工具
理论概念
1、
嵌入式C程序对内存(RAM)中的变量的修改操作类似于对外部设备(寄存器—>对应相关管脚)的操作,都需要通过读取和写入操作进行。对于内存中的变量,可以使用赋值操作符(=)来修改其值,而对于外部设备,需要通过特定的寄存器或相关管脚来进行读取和写入操作。但是,它们之间也存在一些差别。
相同之处:
1.都需要通过特定的操作来修改变量的值或对外部设备进行相应的操作。
2.都需要遵循相应的编程规范和语法,以确保正确的操作和数据传输。
差异之处:
1.内存中的变量可以通过直接访问其内存地址进行修改,而外部设备的操作需要通过特定的寄存器或相关管脚进行。
2.内存中的变量可以在程序执行过程中被修改,而外部设备的操作需要在特定的时机和条件下进行。
3.内存中的变量可以被多个线程或进程同时访问和修改,而外部设备的操作可能需要进行同步或互斥控制,以防止冲突和竞态条件。
2、
51单片机的LED点灯编程相比于STM32来说更简单,主要有以下几个原因:
STM32的外设资源更多,启动文件更复杂,初学者可能会在这些繁琐的设置上感到困惑。
STM32的寄存器编程相对于51单片机来说更为复杂,需要对寄存器的位操作有更深入的理解。
51单片机的开发环境和工具链较为成熟,有更多的资料和教程可供参考,初学者更容易上手。
4、理论概念
register和volatile是嵌入式C程序中经常使用的变量修饰符。
register关键字用于提示编译器将变量存储在CPU寄存器中,以便提高访问速度。由于寄存器的数量有限,编译器可能不会将所有的变量都存储在寄存器中。因此,register关键字只是一个建议,编译器可以选择忽略该建议。以下是一个示例:
register int x; // 将变量x存储在CPU寄存器中
int main() {
x = 10;
// 其他代码
return 0;
}
volatile关键字用于告诉编译器,该变量的值可能会在意料之外的时候发生改变,因此编译器不应该对该变量进行优化。这通常用于访问硬件寄存器或多线程编程中。以下是一个示例:
volatile int y; // 声明一个volatile变量y
void ISR() {
y = 1; // 在中断服务程序中修改y的值
}
int main() {
while (y != 1) {
// 等待y的值变为1
}
// 其他代码
return 0;
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









