







在多智能体系统的研究过程中,图论是重要的分析工具。这里的图表示的是一类事物之间的联系。多智能体系统图论是指应用图论的相关理论及方法来研究多智能体系统中的协同、合作和竞争等问题。多智能体系统是由多个智能体组成的复杂系统,其智能体之间存在着互动和协作关系。图论是一种研究图结构和图论算法的数学理论,可以用来描述和分析多智能体系统中的结构和行为。在多智能体系统图论中,通常使用图表示智能体之间的关系和交互方式。常见的图模型包括有向图、无向图、加权图等。在图模型中,节点表示智能体,边表示智能体之间的关系和互动。例如,在一个智能交通系统中,车辆可以表示为图的节点,道路可以表示为图的边,车辆之间及车辆与道路之间的交互可以通过图来表示和描述。以下是图的一些基本概念:
含N个节点的通信拓扑图可用图来表示,其中
表示图
的节点集,如每个智能体都可以看作一个节点。
为图
的边集。如任意两个智能体之间有联系,则他们之间的联系可用边表示。
是图
的邻接矩阵。其中
表示节点
和
之间的连接权值。通常情况下
为非负数。
如果节点能够直接接收到
节点的信息,
,一般默认为1,如果不能接收到信息,则
,如果任意两个节点
和
有
,则该图是无向图,否则称有向图。对于无向图,
的邻居就是所有跟它有连线的节点,对于有向图,
的邻居就是所有指向
的节点,用
表示。对于无向图,所有邻居节点的个数叫做该节点的度,用
表示,
。定义度矩阵
。对于有向图分为入度和出度,出度是所有从
出发的边的个数,入度就是所有指向
的边的个数。图中从一个节点到另一个节点,至少存在一条路径,则称这两个节点是联通的,若任意两个节点之间都能联通,则图为联通图。在有向图中,若任意两个节点
和
,满足
到
以及
到
都联通,则称图为强连通图。如果一个图(有向或无向)没有环,但却是联通的,那么这种特殊的图叫做树。
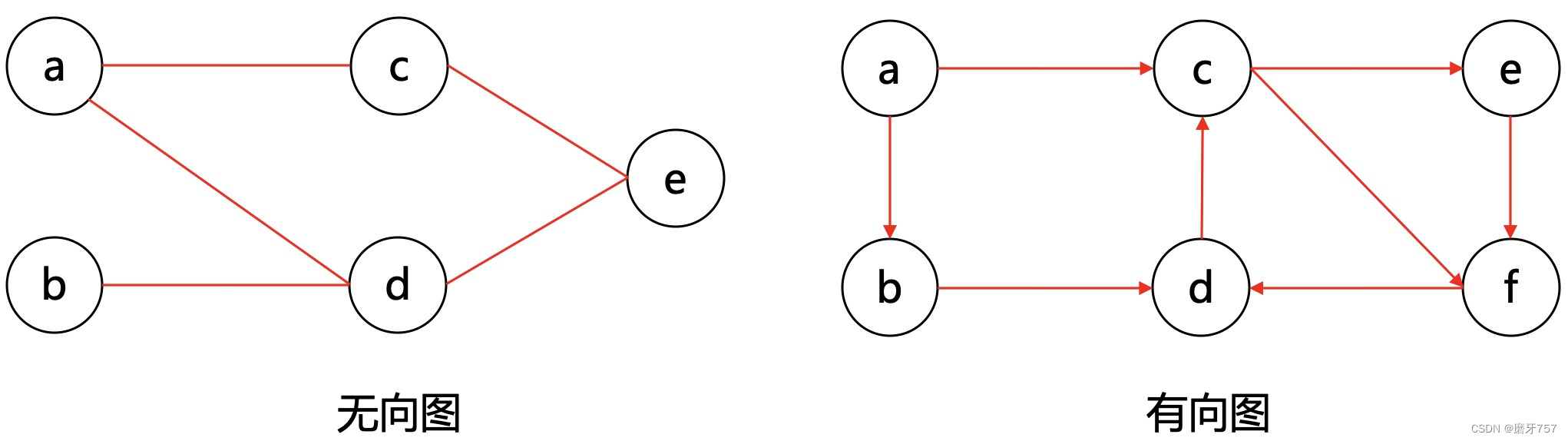
以无向图为例,a的邻居就是c和d,出度=入度=2;以有向图为例,d的邻居就是b和f,出度为1(d指向c),入度为2(b和f指向d)
定义图的拉普拉斯矩阵。
以无向图为例
,
,
以有向图为例
,















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









