






今天主要讲原理以及如何用OpenCV库实现,大家如果有兴趣下期可以出算法代码实现。
角点(Corner Points)
通常意义上来说,角点就是极值点,即在某方面属性特别突出的点,是在某些属性上强度最大或者最小的孤立点、线段的终点。对于图像而言,角点是指物体边缘的拐点(交点),它是一种非常重要的局部特征,决定了图像中目标的形状,所以在图像匹配、目标描述与识别以及运动估计、目标跟踪等领域,角点提取都具有十分重要的意义。
1.Harris角点检测
利用矩形窗在图像上移动,若窗内包含有角点,则窗口向各个方向移动进而利用这一规律实现图像角点检测的目时,窗内的灰度值都会发生变化。具体地,考虑以下三种情况:

从数学角度来看,Harris角点检测算法受信号处理中自相关函数的启发,设计了以下自相关函数来描述局部窗口的亮度变化:
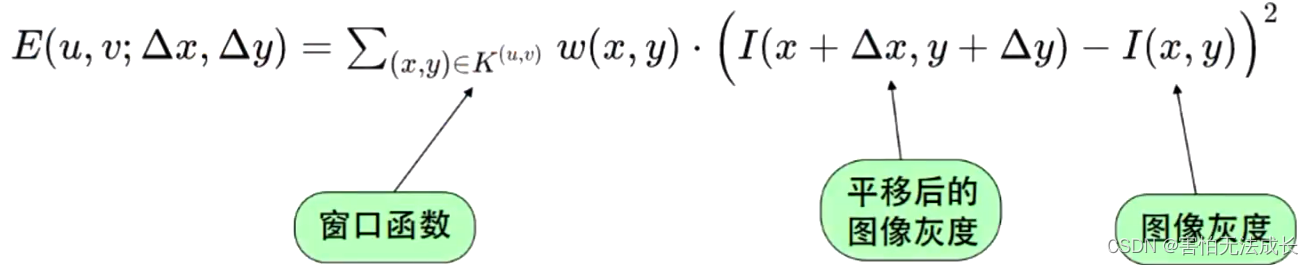
(u,v)代表当前待判定的像素点,△x,△y 分别是水平、垂直方向上的偏移量; I(x, y)代表图像 I在点(x,y)的亮度值; w(x,y)是局部窗口加权函数,有高斯加权和均值加权等。
但是如何求解 平移后的图像灰度呢?
![]()
需要用到高数中 的 泰勒展开式:
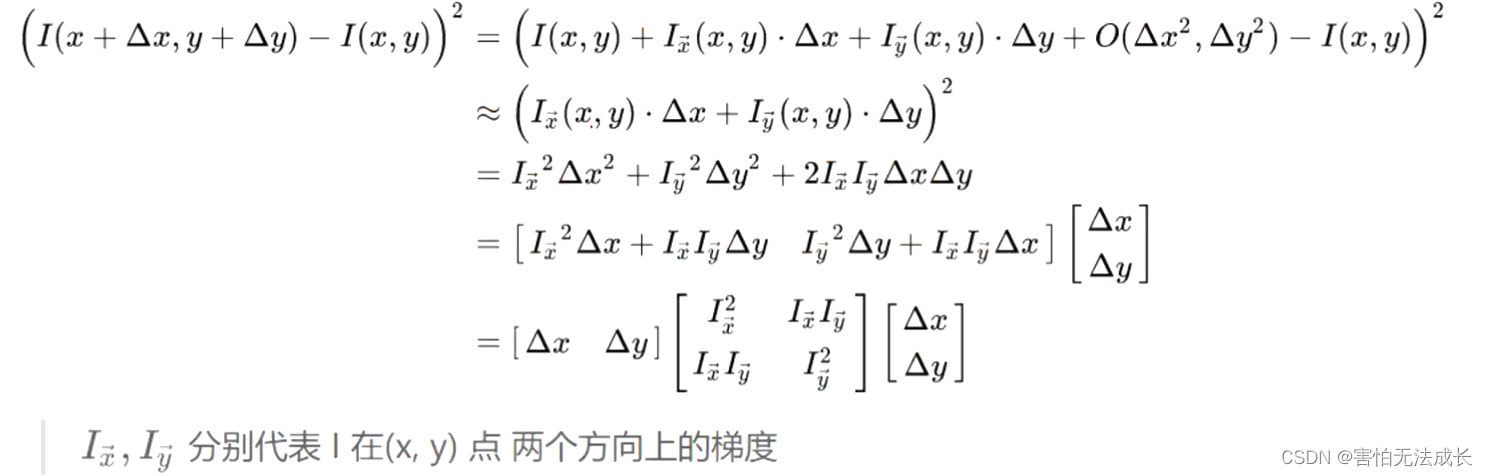
再将 其带入原来的亮度变化公式:
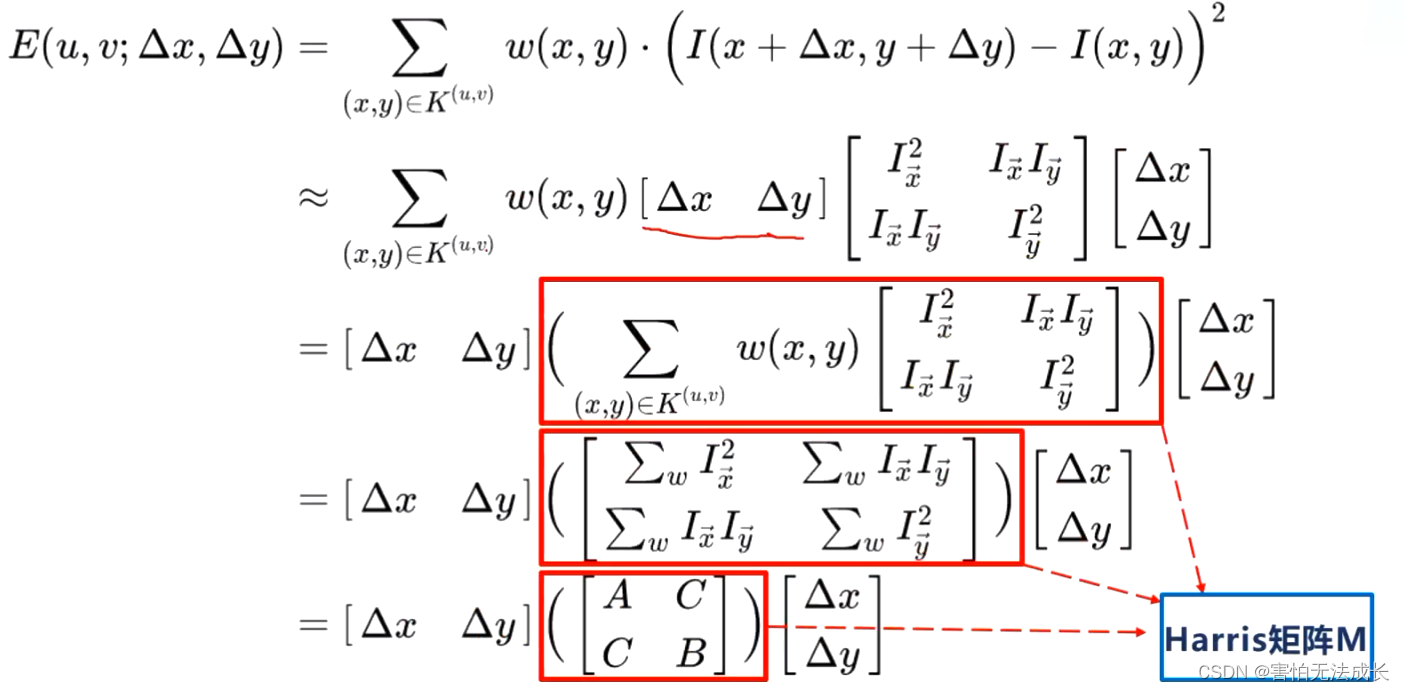
1.1Harris矩阵M
将公式展开,可以发现交叉项为0时,即C=0,令表达式等于常数Q,则其为一个椭圆。


此时局部区域的域的梯度方向信息都集中在主对角线上,入1表征了x方向的梯度信息,入2表征了y方向的梯度. 有如下结论:

但是上述结论是交叉项C=0得出的,如果C不为0呢?
我们可以采用线性代数的方法。此时,我们可以通过对Harris矩阵M进行正交相似对角化来消除交叉项,从而将坐标轴旋转到实际椭圆对应的梯度方向上。如下:

带入亮度变化公式:
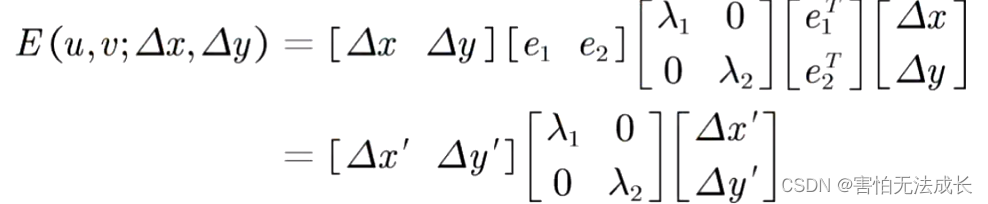
展开上式:
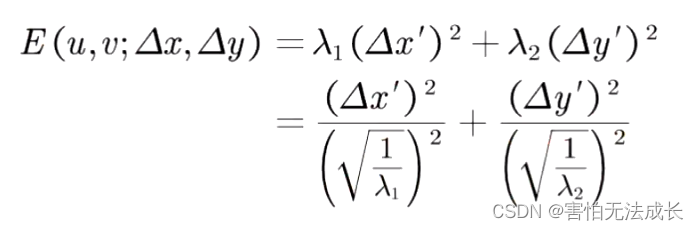
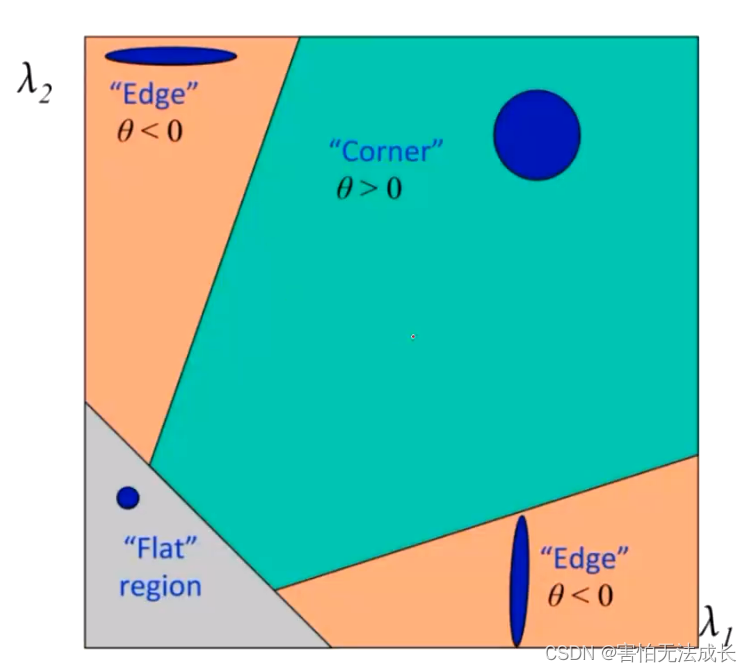
可以看到,只有入1和入2都为较大值时E才能取到较大数,此时(u,v)为角点.综上所述,我们可以有如下结论:
M矩阵的两个特征值入1、入2的大小相对关系可以判断角点,即:
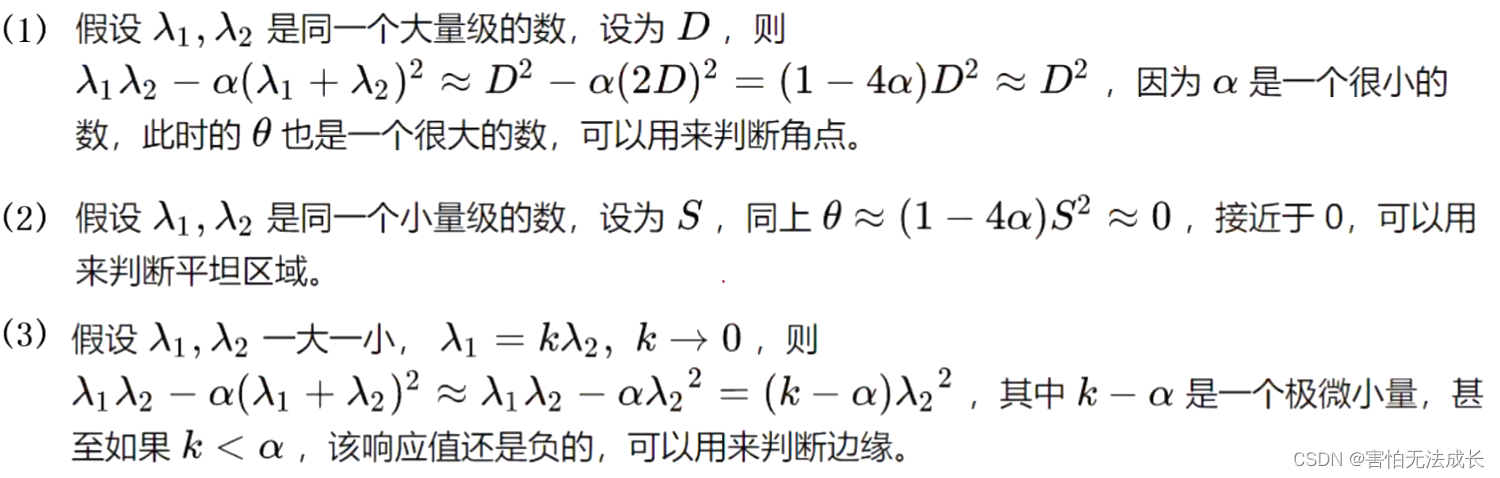
1.2如何界定特征值入1、入2的大小相对关系?
到底什么情况特征值入1、入2为较大值,什么情况为较小值?
角点响应函数
因此一般步骤为: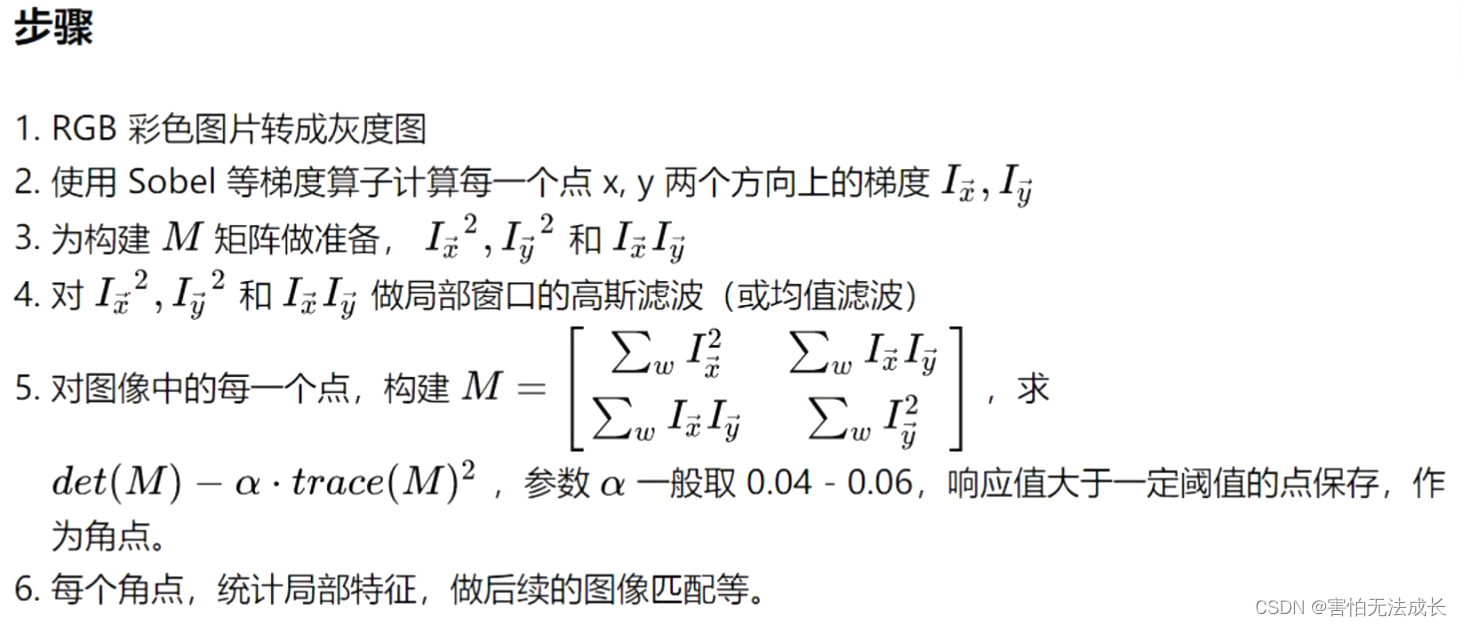
用OpenCV库函数调用示例:
cornerHarris(img,dst,blockSize,ksize,k) blockSize:检测窗口大小 ksize:sobel卷积核 k:权重系数,经验值,一般取0.02-0.04之间
import cv2
import numpy as np
blockSize=2
ksize=3
k=0.04
img=cv2.imread(r"C:\Users\86166\Desktop\corner2.png")
cv2.imshow("img",img)
#灰度 化 角点检测需要灰度图 否则 会报错
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
dst=cv2.cornerHarris(gray,blockSize,ksize,k)
print(dst.shape)
img[dst>0.01*dst.max()]=[0,0,255]
cv2.imshow('harris',img)
cv2.waitKey(0)现象如下: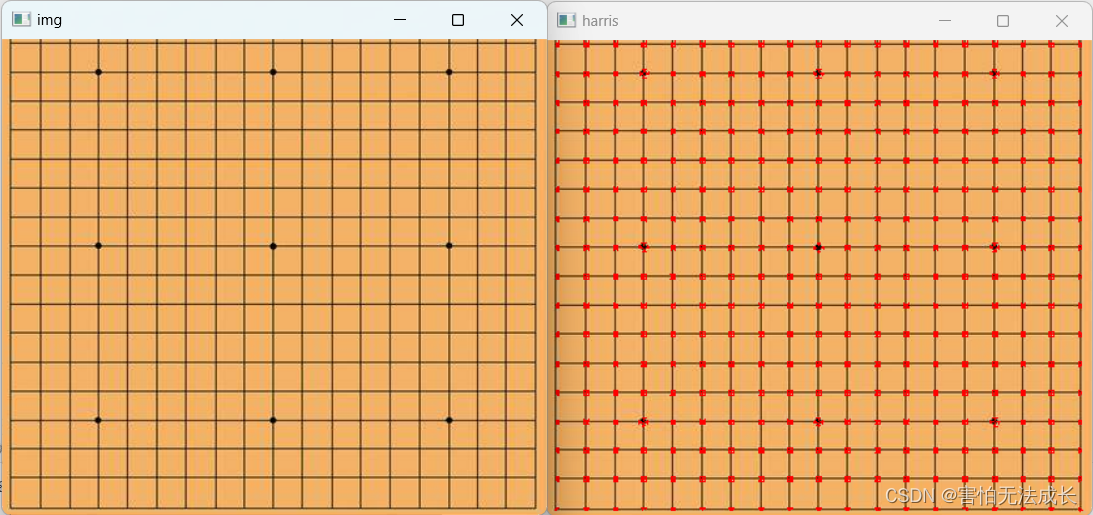

















 284
284

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









