







Overview — ROS2 Grasp Library Tutorials 0.5.0 documentation
Robot Interface — ROS2 Grasp Library Tutorials 0.5.0 documentation
手动添加ompl_planning.yaml文件
planning_plugins:
- ompl_interface/OMPLPlanner
# To optionally use Ruckig for jerk-limited smoothing, add this line to the request adapters below
# default_planning_request_adapters/AddRuckigTrajectorySmoothing
request_adapters:
- default_planning_request_adapters/ResolveConstraintFrames
- default_planning_request_adapters/ValidateWorkspaceBounds
- default_planning_request_adapters/CheckStartStateBounds
- default_planning_request_adapters/CheckStartStateCollision
response_adapters:
- default_planning_response_adapters/AddTimeOptimalParameterization
- default_planning_response_adapters/ValidateSolution
- default_planning_response_adapters/DisplayMotionPath
planner_configs:
APSConfigDefault:
type: geometric::AnytimePathShortening
shortcut: 1 # Attempt to shortcut all new solution paths
hybridize: 1 # Compute hybrid solution trajectories
max_hybrid_paths: 36 # Number of hybrid paths generated per iteration
num_planners: 8 # The number of default planners to use for planning
planners: "RRTConnect,RRTConnect,RRTConnect,RRTConnect,RRTConnect,RRTConnect,RRTConnect,RRTConnect" # A comma-separated list of planner types (e.g., "PRM,EST,RRTConnect"Optionally, planner parameters can be passed to change the default:"PRM[max_nearest_neighbors=5],EST[goal_bias=.5],RRT[range=10. goal_bias=.1]"
SBLkConfigDefault:
type: geometric::SBL
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
ESTkConfigDefault:
type: geometric::EST
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0 setup()
goal_bias: 0.05 # When close to goal select goal, with this probability. default: 0.05
LBKPIECEkConfigDefault:
type: geometric::LBKPIECE
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
border_fraction: 0.9 # Fraction of time focused on boarder default: 0.9
min_valid_path_fraction: 0.5 # Accept partially valid moves above fraction. default: 0.5
BKPIECEkConfigDefault:
type: geometric::BKPIECE
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
border_fraction: 0.9 # Fraction of time focused on boarder default: 0.9
failed_expansion_score_factor: 0.5 # When extending motion fails, scale score by factor. default: 0.5
min_valid_path_fraction: 0.5 # Accept partially valid moves above fraction. default: 0.5
KPIECEkConfigDefault:
type: geometric::KPIECE
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability. default: 0.05
border_fraction: 0.9 # Fraction of time focused on boarder default: 0.9 (0.0,1.]
failed_expansion_score_factor: 0.5 # When extending motion fails, scale score by factor. default: 0.5
min_valid_path_fraction: 0.5 # Accept partially valid moves above fraction. default: 0.5
RRTkConfigDefault:
type: geometric::RRT
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability? default: 0.05
RRTConnectkConfigDefault:
type: geometric::RRTConnect
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
RRTstarkConfigDefault:
type: geometric::RRTstar
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability? default: 0.05
delay_collision_checking: 1 # Stop collision checking as soon as C-free parent found. default 1
TRRTkConfigDefault:
type: geometric::TRRT
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability? default: 0.05
max_states_failed: 10 # when to start increasing temp. default: 10
temp_change_factor: 2.0 # how much to increase or decrease temp. default: 2.0
min_temperature: 10e-10 # lower limit of temp change. default: 10e-10
init_temperature: 10e-6 # initial temperature. default: 10e-6
frountier_threshold: 0.0 # dist new state to nearest neighbor to disqualify as frontier. default: 0.0 set in setup()
frountierNodeRatio: 0.1 # 1/10, or 1 nonfrontier for every 10 frontier. default: 0.1
k_constant: 0.0 # value used to normalize expresssion. default: 0.0 set in setup()
PRMkConfigDefault:
type: geometric::PRM
max_nearest_neighbors: 10 # use k nearest neighbors. default: 10
PRMstarkConfigDefault:
type: geometric::PRMstar
FMTkConfigDefault:
type: geometric::FMT
num_samples: 1000 # number of states that the planner should sample. default: 1000
radius_multiplier: 1.1 # multiplier used for the nearest neighbors search radius. default: 1.1
nearest_k: 1 # use Knearest strategy. default: 1
cache_cc: 1 # use collision checking cache. default: 1
heuristics: 0 # activate cost to go heuristics. default: 0
extended_fmt: 1 # activate the extended FMT*: adding new samples if planner does not finish successfully. default: 1
BFMTkConfigDefault:
type: geometric::BFMT
num_samples: 1000 # number of states that the planner should sample. default: 1000
radius_multiplier: 1.0 # multiplier used for the nearest neighbors search radius. default: 1.0
nearest_k: 1 # use the Knearest strategy. default: 1
balanced: 0 # exploration strategy: balanced true expands one tree every iteration. False will select the tree with lowest maximum cost to go. default: 1
optimality: 1 # termination strategy: optimality true finishes when the best possible path is found. Otherwise, the algorithm will finish when the first feasible path is found. default: 1
heuristics: 1 # activates cost to go heuristics. default: 1
cache_cc: 1 # use the collision checking cache. default: 1
extended_fmt: 1 # Activates the extended FMT*: adding new samples if planner does not finish successfully. default: 1
PDSTkConfigDefault:
type: geometric::PDST
STRIDEkConfigDefault:
type: geometric::STRIDE
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability. default: 0.05
use_projected_distance: 0 # whether nearest neighbors are computed based on distances in a projection of the state rather distances in the state space itself. default: 0
degree: 16 # desired degree of a node in the Geometric Near-neightbor Access Tree (GNAT). default: 16
max_degree: 18 # max degree of a node in the GNAT. default: 12
min_degree: 12 # min degree of a node in the GNAT. default: 12
max_pts_per_leaf: 6 # max points per leaf in the GNAT. default: 6
estimated_dimension: 0.0 # estimated dimension of the free space. default: 0.0
min_valid_path_fraction: 0.2 # Accept partially valid moves above fraction. default: 0.2
BiTRRTkConfigDefault:
type: geometric::BiTRRT
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
temp_change_factor: 0.1 # how much to increase or decrease temp. default: 0.1
init_temperature: 100 # initial temperature. default: 100
frountier_threshold: 0.0 # dist new state to nearest neighbor to disqualify as frontier. default: 0.0 set in setup()
frountier_node_ratio: 0.1 # 1/10, or 1 nonfrontier for every 10 frontier. default: 0.1
cost_threshold: 1e300 # the cost threshold. Any motion cost that is not better will not be expanded. default: inf
LBTRRTkConfigDefault:
type: geometric::LBTRRT
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability. default: 0.05
epsilon: 0.4 # optimality approximation factor. default: 0.4
BiESTkConfigDefault:
type: geometric::BiEST
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
ProjESTkConfigDefault:
type: geometric::ProjEST
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
goal_bias: 0.05 # When close to goal select goal, with this probability. default: 0.05
LazyPRMkConfigDefault:
type: geometric::LazyPRM
range: 0.0 # Max motion added to tree. ==> maxDistance_ default: 0.0, if 0.0, set on setup()
LazyPRMstarkConfigDefault:
type: geometric::LazyPRMstar
SPARSkConfigDefault:
type: geometric::SPARS
stretch_factor: 3.0 # roadmap spanner stretch factor. multiplicative upper bound on path quality. It does not make sense to make this parameter more than 3. default: 3.0
sparse_delta_fraction: 0.25 # delta fraction for connection distance. This value represents the visibility range of sparse samples. default: 0.25
dense_delta_fraction: 0.001 # delta fraction for interface detection. default: 0.001
max_failures: 1000 # maximum consecutive failure limit. default: 1000
SPARStwokConfigDefault:
type: geometric::SPARStwo
stretch_factor: 3.0 # roadmap spanner stretch factor. multiplicative upper bound on path quality. It does not make sense to make this parameter more than 3. default: 3.0
sparse_delta_fraction: 0.25 # delta fraction for connection distance. This value represents the visibility range of sparse samples. default: 0.25
dense_delta_fraction: 0.001 # delta fraction for interface detection. default: 0.001
max_failures: 5000 # maximum consecutive failure limit. default: 5000
TrajOptDefault:
type: geometric::TrajOpt
arm100_arm:
planner_configs:
- APSConfigDefault
- SBLkConfigDefault
- ESTkConfigDefault
- LBKPIECEkConfigDefault
- BKPIECEkConfigDefault
- KPIECEkConfigDefault
- RRTkConfigDefault
- RRTConnectkConfigDefault
- RRTstarkConfigDefault
- TRRTkConfigDefault
- PRMkConfigDefault
- PRMstarkConfigDefault
- FMTkConfigDefault
- BFMTkConfigDefault
- PDSTkConfigDefault
- STRIDEkConfigDefault
- BiTRRTkConfigDefault
- LBTRRTkConfigDefault
- BiESTkConfigDefault
- ProjESTkConfigDefault
- LazyPRMkConfigDefault
- LazyPRMstarkConfigDefault
- SPARSkConfigDefault
- SPARStwokConfigDefault
- TrajOptDefault
arm100_hand:
planner_configs:
- APSConfigDefault
- SBLkConfigDefault
- ESTkConfigDefault
- LBKPIECEkConfigDefault
- BKPIECEkConfigDefault
- KPIECEkConfigDefault
- RRTkConfigDefault
- RRTConnectkConfigDefault
- RRTstarkConfigDefault
- TRRTkConfigDefault
- PRMkConfigDefault
- PRMstarkConfigDefault
- FMTkConfigDefault
- BFMTkConfigDefault
- PDSTkConfigDefault
- STRIDEkConfigDefault
- BiTRRTkConfigDefault
- LBTRRTkConfigDefault
- BiESTkConfigDefault
- ProjESTkConfigDefault
- LazyPRMkConfigDefault
- LazyPRMstarkConfigDefault
- SPARSkConfigDefault
- SPARStwokConfigDefault
- TrajOptDefault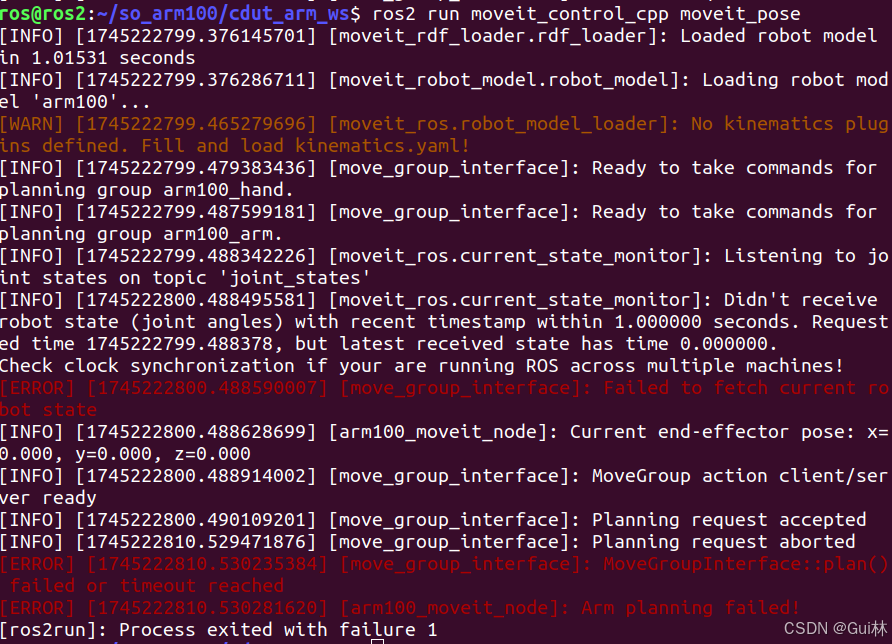



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











