







深度学习经典检测方法
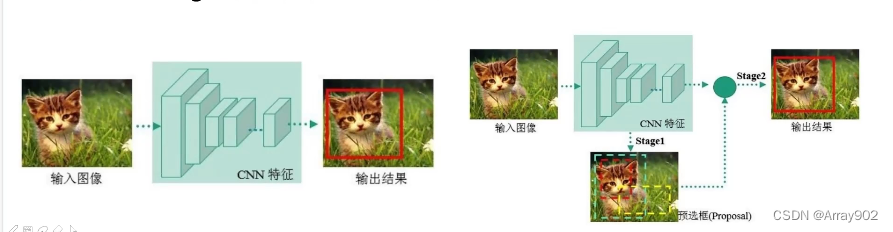
two-stage(两阶段):Faster-rcnn\Mask-Rcnn系列(两阶段即多了一步预选操作)
one-stage(单阶段):YOLO系列(直接处理,不需要对数据进行预选)
one-stage:
最核心的优势:速度非常快,适合做实时监测任务!
但是缺点也是有的,效果通常情况下不会太好!(速度越快效果越差,二者相互有些矛盾)
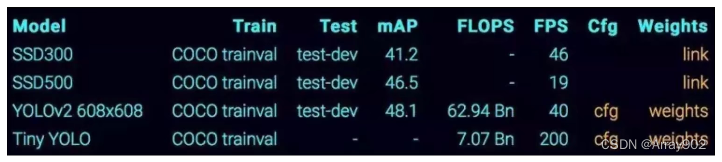
mAP:效果好坏
FPS:速度快慢
two-stage:
速度通常较慢(5FPS),但是效果是不错的!
YOLO
指标分析
map指标:综合衡量检测效果;
单看精度和recall(召回率)是很难看出算法的好坏的,因为二者之间是矛盾的,一方高,另一方就低。
IOU(Intersection over Union):交集和并集的一个比值(越重叠越好)
recall:图像中所有存在的物体都检测到了吗
Recall= TP:T(TRUE),正确的判断为正确的positive
Precision= FP:F(FALSE),错误的判断为正确的positive
TN:T(TRUE),正确的判断为了负类
FN:F(FALSE),错误的判断为了负类

例: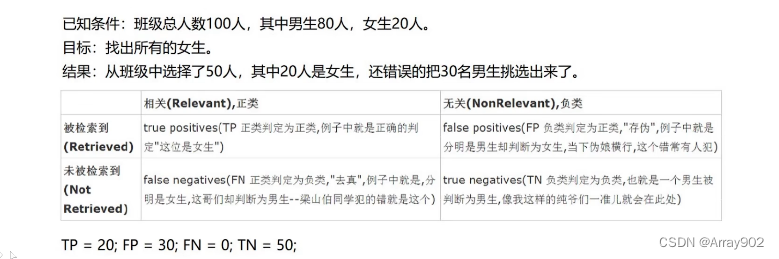 MAP:不同的置信度(阈值)下得出的P,R值,画图取最大值求面积
MAP:不同的置信度(阈值)下得出的P,R值,画图取最大值求面积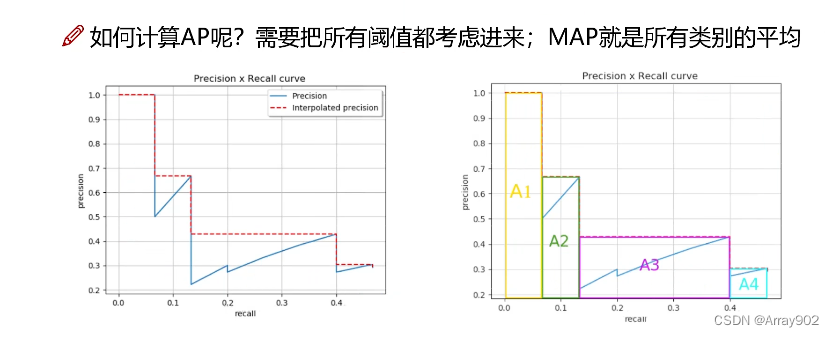
YOLO-V1
名称:You Only Look Once
把检测问题转换为回归问题,一个CNN就搞定了!
对视频进行实时检测,应用领域非常广!
核心思想
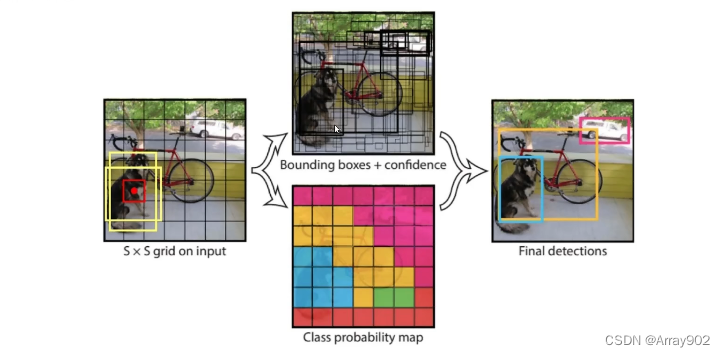
简单概述:输入一张图像,对图像中的所有点都产生两个候选框,选一个候选框进行微调,但是并不是对所有点的候选框都进行选取,而是对候选框中确实存在着一个物体才进行选取,那嘛判断候选框中是否存在物体就依据置信度(或者是阈值)来判断,确定了确实有物体的点后,再进行对两种候选框的筛选,筛选的方法就是算IOU,选取IOU高的候选框进行微调便确定出来了;(回归问题)
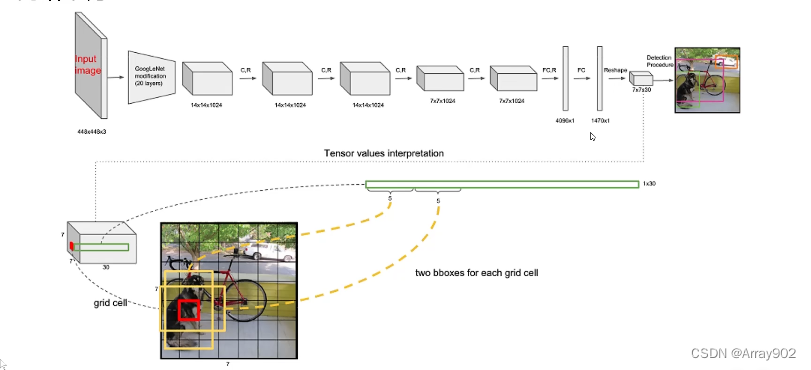
网络架构















 12万+
12万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









