






一,LED周期性亮灭
(一)定时器
1,定时器的分类
通用定时器(General Purpose Timer):
TIM2、TIM3、TIM4: 这些定时器是STM32F103系列的通用定时器,可以用于产生PWM信号、测量脉冲宽度、定时等应用。它们具有多种工作模式,包括定时模式、输入捕获模式、输出比较模式和PWM模式等。
特点: 通用定时器具有较为简单的功能,适用于一般的定时和PWM控制应用。
高级定时器(Advanced Control Timer):
TIM1: TIM1是STM32F103系列中的高级定时器,具有更强大的功能和更高的性能。它支持更多的通道和更高的分辨率,能够满足复杂的定时、PWM控制和高级定时应用。
特点: 高级定时器具有更丰富的功能和更高的性能,适用于复杂的定时、PWM控制和高级定时应用,如电机控制、功率因数校正等。
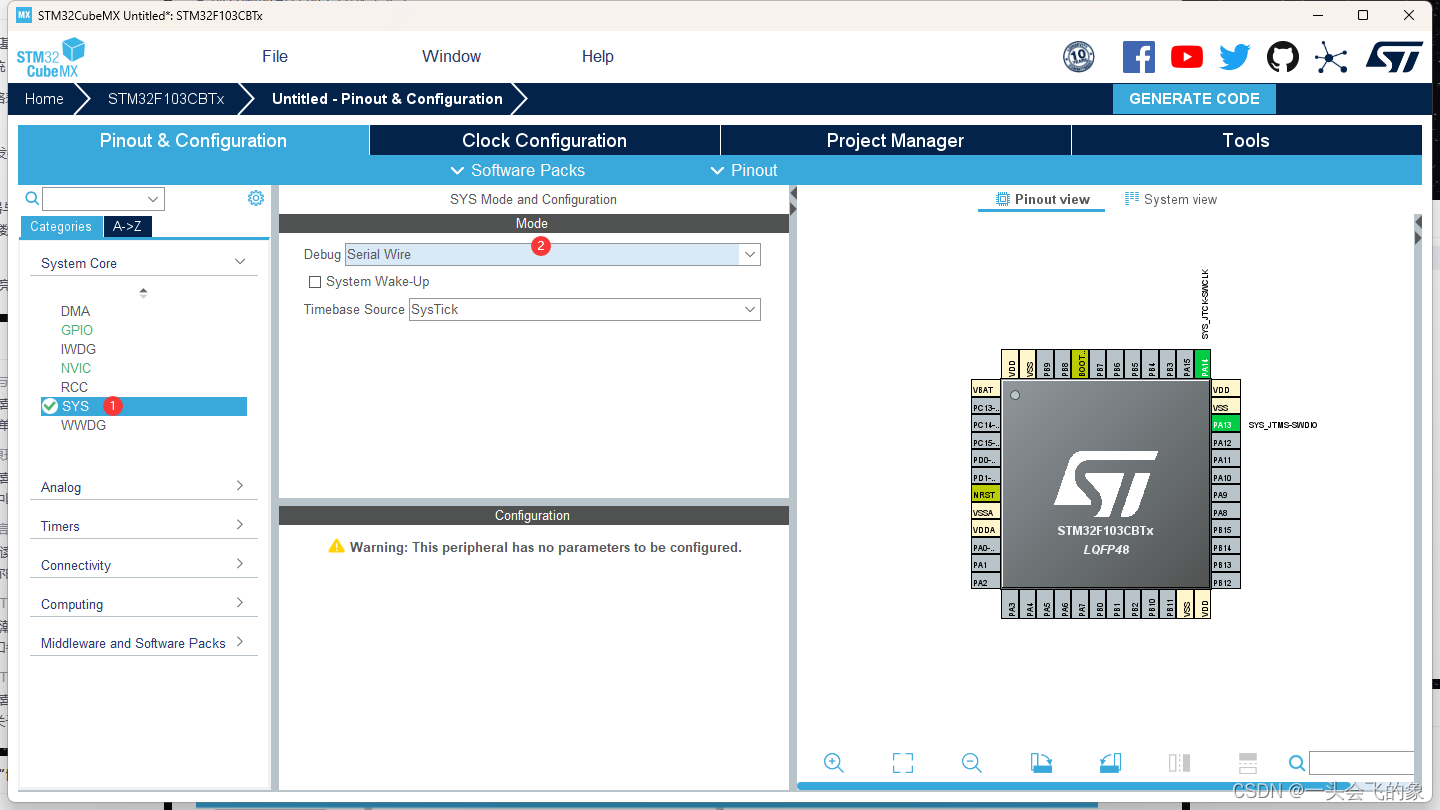
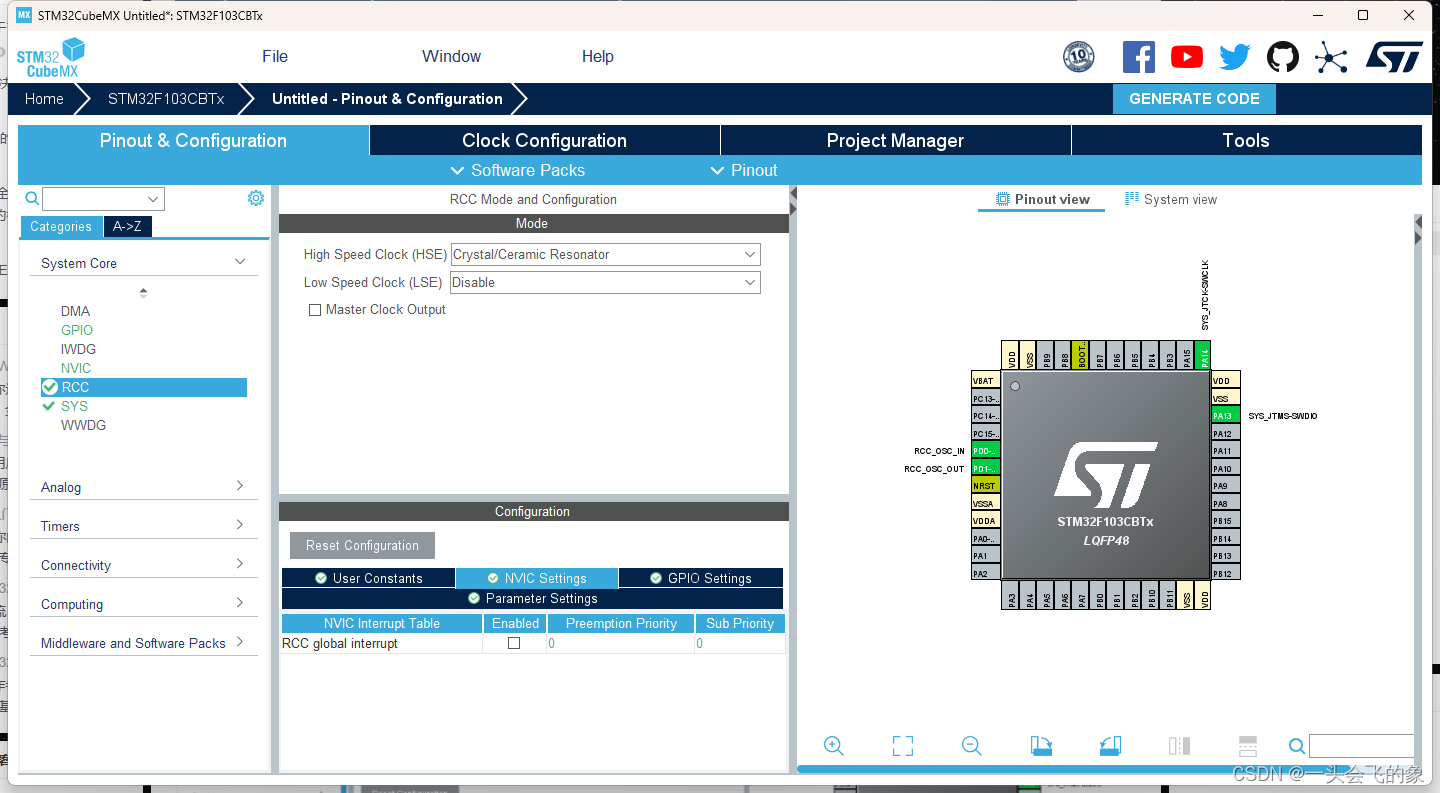
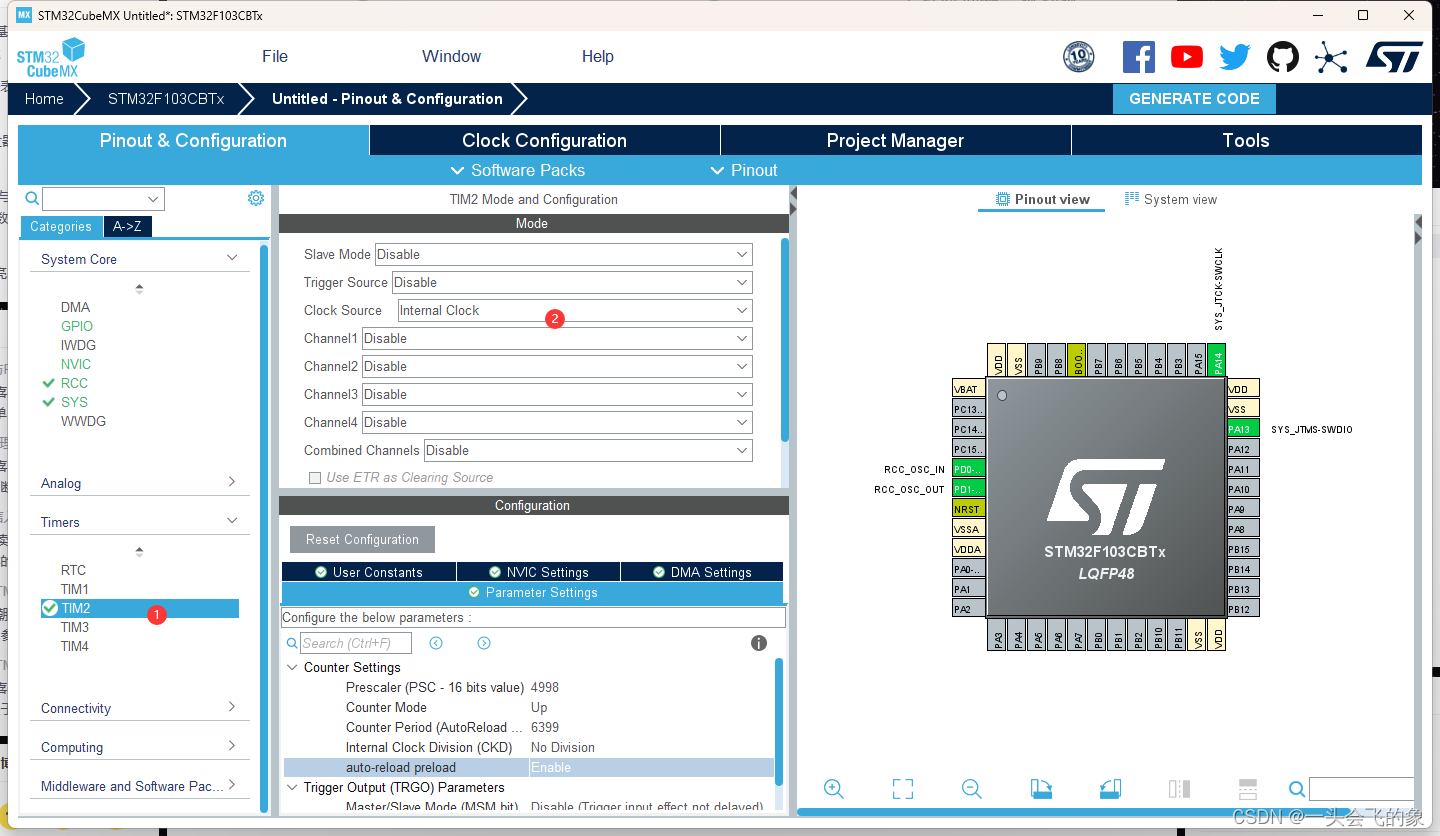
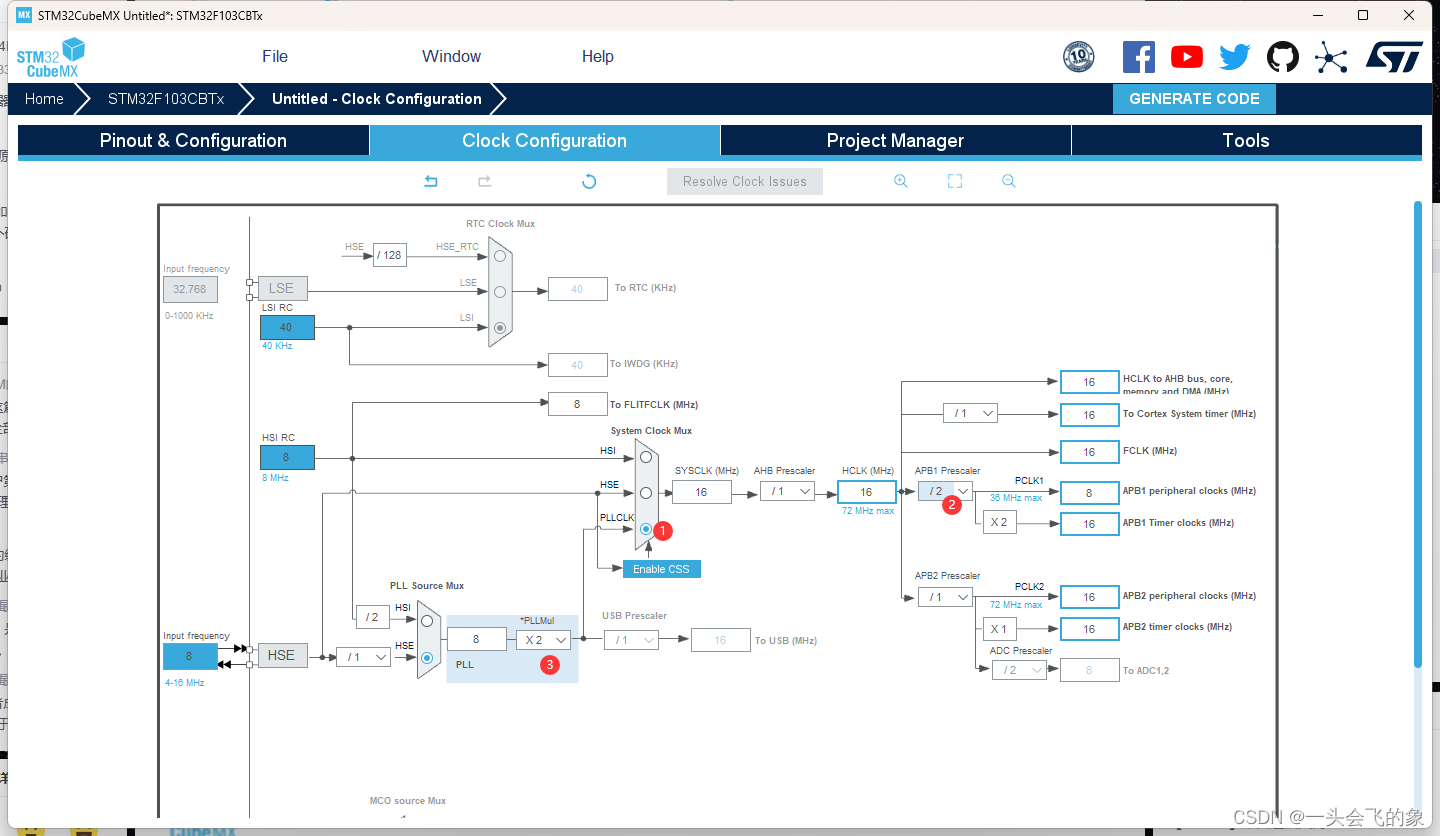
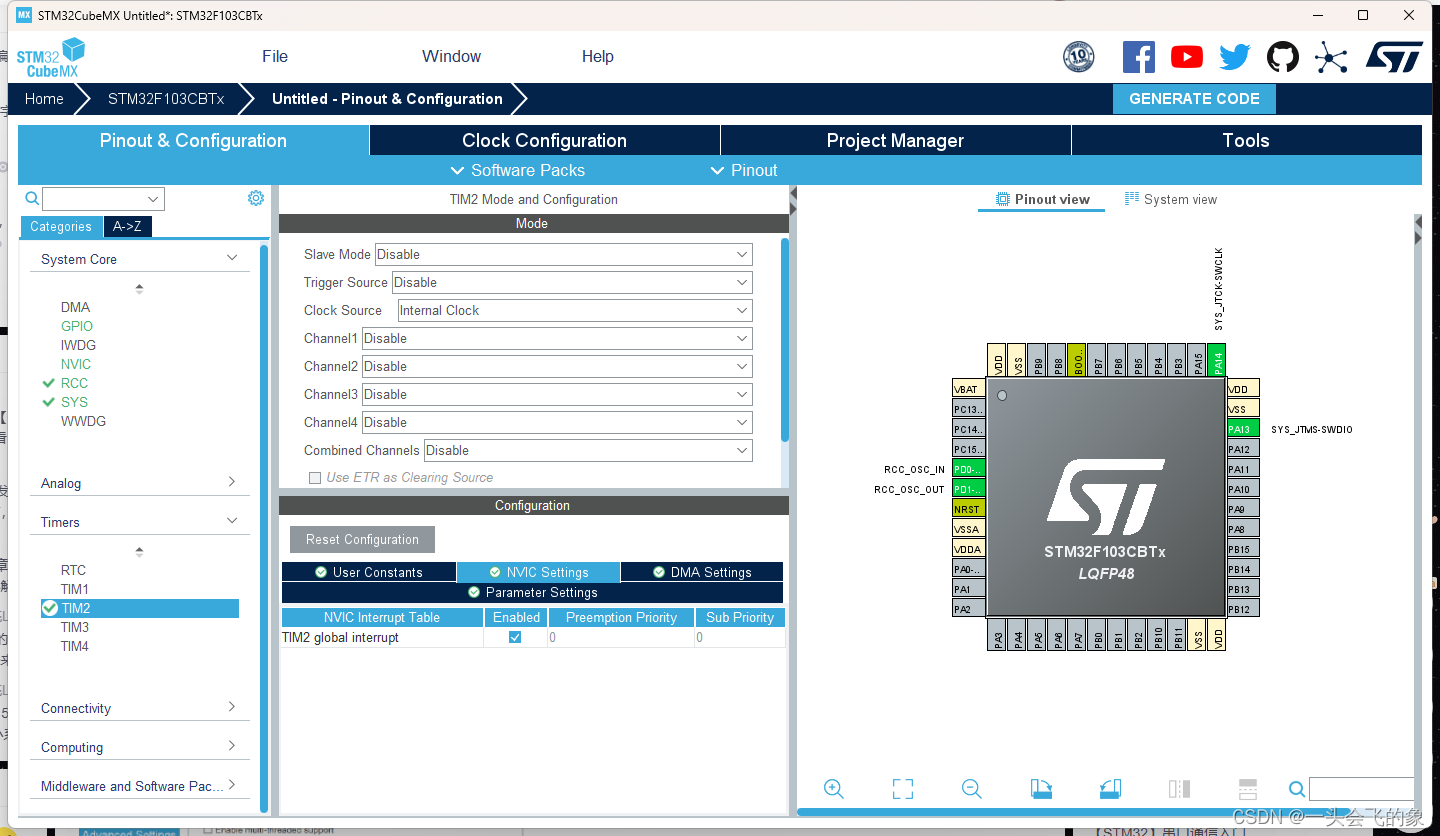
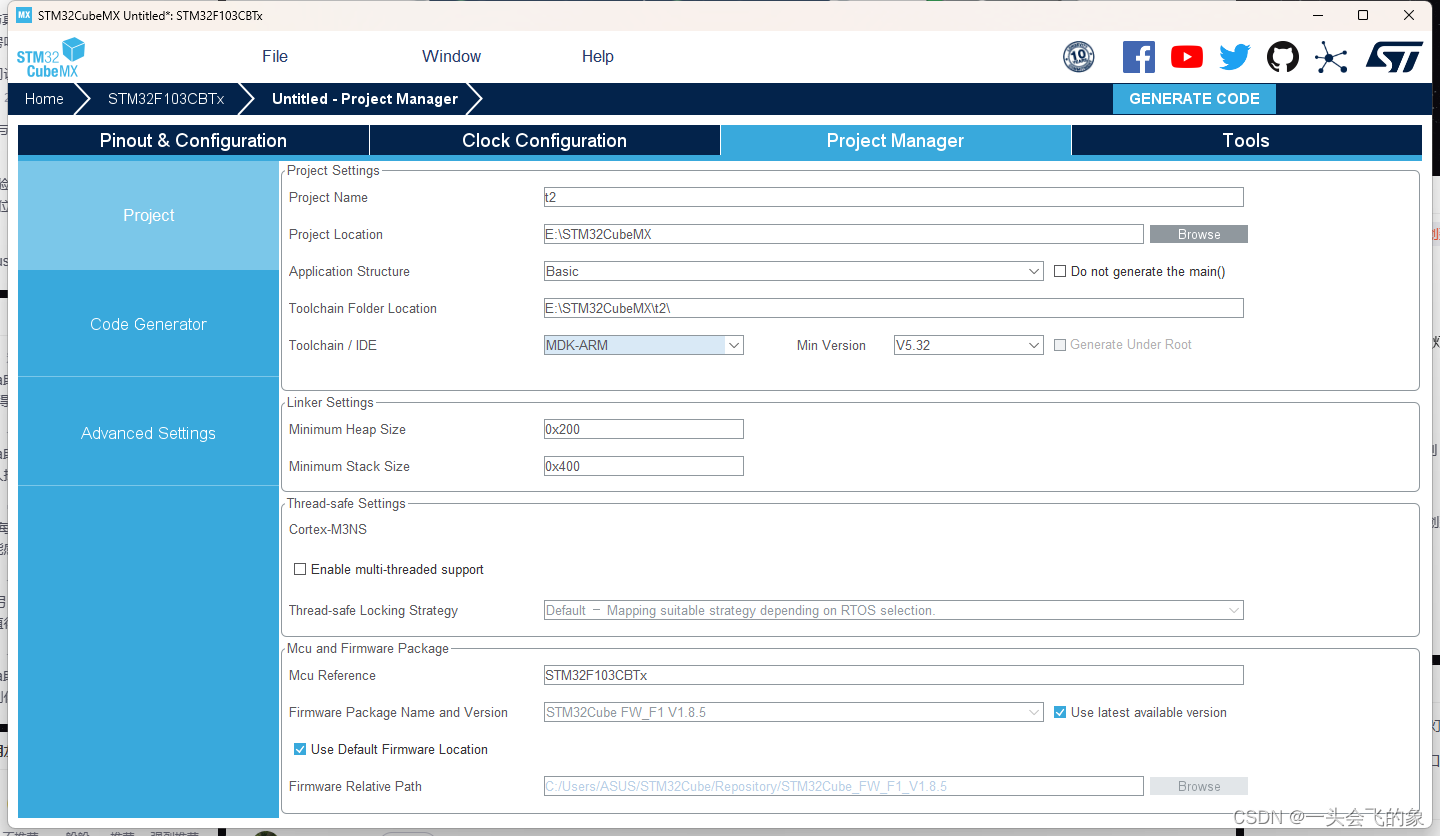
(二)STM32CubeMX工程
(三)代码
Timer.c
#include "stm32f10x.h" // Device header
/**
* 函 数:定时中断初始化
* 参 数:无
* 返 回 值:无
*/
void Timer_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*中断输出配置*/
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位
//TIM_TimeBaseInit函数末尾,手动产生了更新事件
//若不清除此标志位,则开启中断后,会立刻进入一次中断
//如果不介意此问题,则不清除此标志位也可
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/* 定时器中断函数,可以复制到使用它的地方
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
*/LED.c
#include "stm32f10x.h" // Device header
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Timer.h"
#include "LED.h"
int main(void)
{
LED_Init();
Timer_Init();
while (1)
{
}
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_5,(BitAction)((1- GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_5))));
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
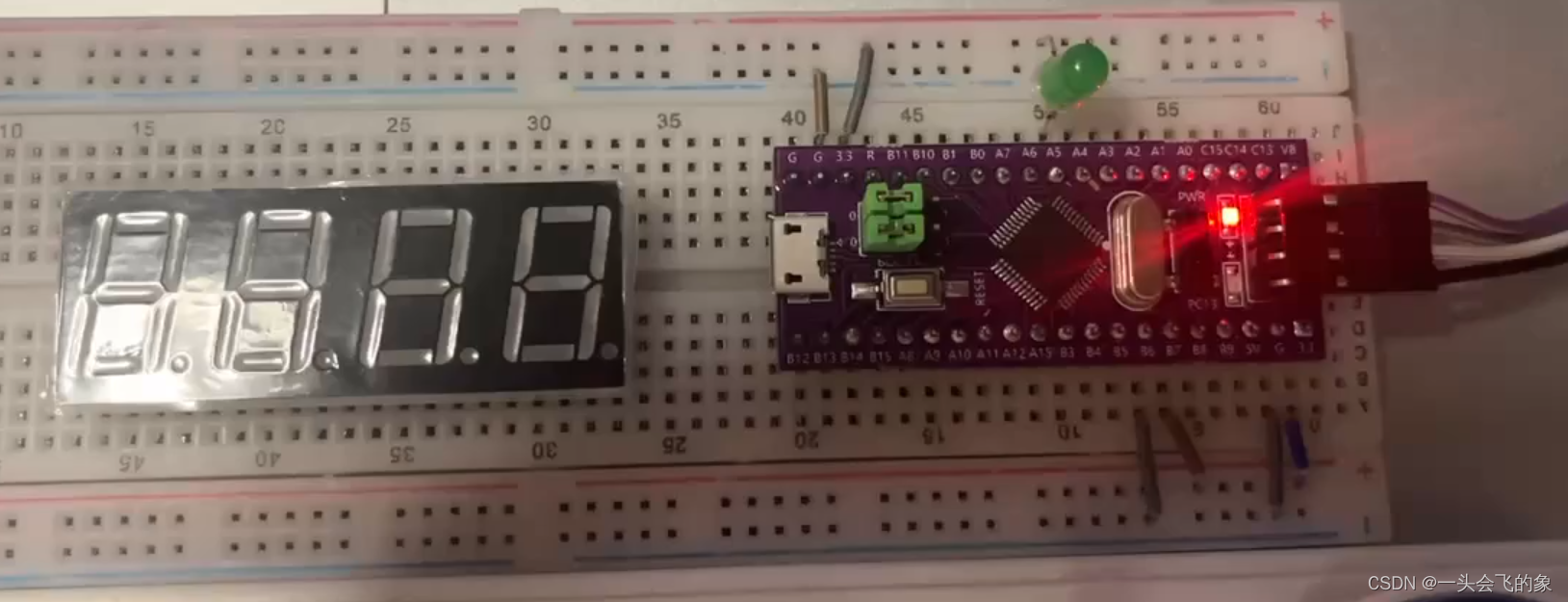
(四)实验结果
二,PWM模式控制LED呼吸灯
采用定时器PWM模式,让 LED 以呼吸灯方式渐亮渐灭,周期为1~2秒,自己调整占空比变化到一个满意效果;使用Keil虚拟示波器,观察 PWM输出波形。
(一)代码实现
#include "stm32f10x.h" // Device header
/**
* 函 数:PWM初始化
* 参 数:无
* 返 回 值:无
*/
void PWM_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO重映射*/
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,重映射必须先开启AFIO的时钟
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); //将TIM2的引脚部分重映射,具体的映射方案需查看参考手册
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); //将JTAG引脚失能,作为普通GPIO引脚使用
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为复用推挽输出
//受外设控制的引脚,均需要配置为复用模式
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*输出比较初始化*/
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量
TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM2的输出比较通道1
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/**
* 函 数:PWM设置CCR
* 参 数:Compare 要写入的CCR的值,范围:0~100
* 返 回 值:无
* 注意事项:CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比
* 占空比Duty = CCR / (ARR + 1)
*/
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM2, Compare); //设置CCR1的值
}#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "PWM.h"
uint8_t i; //定义for循环的变量
int main(void)
{
/*模块初始化*/
PWM_Init(); //PWM初始化
while (1)
{
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(i); //依次将定时器的CCR寄存器设置为0~100,PWM占空比逐渐增大,LED逐渐变亮
Delay_ms(15); //延时500ms
}
for (i = 0; i <= 100; i++)
{
PWM_SetCompare1(100 - i); //依次将定时器的CCR寄存器设置为100~0,PWM占空比逐渐减小,LED逐渐变暗
Delay_ms(15); //延时500ms
}
}
}参考博客:















 280
280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









