







作者|Andrea Powell 编译自:WIRED
出品|遇见人工智能 公众号 GOwithAI
>>>>昨日全平台阅读量:7万4000余次>>>>
假肢和真实的肢体的距离正在缩小。
得益于电池、大脑控制机器人和人工智能的进步,今天的机械肢体可以完成从扭动、指向、抓斗和举重等所有事情。
这不仅仅对截肢者来说是个好消息,达帕革命修复计划的经理贾斯汀·桑切斯说:“对于类似于炸弹处理的东西,为什么不使用机器人手臂呢?”那肯定会得心应手。
以下为整理的6种超强的假肢,从拥有者、技能和特色分别阐述,以下Enjoy:
一:脑动臂

名称:Brain-Operated Arm
本领:触摸手,伸出手。
精神控制的四肢并不新鲜,但是匹兹堡大学的科学家们正在研究一种能感觉到的手臂。电线连接手臂和大脑,因此当施加压力时,信号会提醒感觉皮层。
二:AI控制下的手
 名称:Hand That Sees
名称:Hand That Sees
本领:仿真,寻找一切机会
纽卡斯尔大学的研究人员设计了一只手,用一台微型相机拍摄它所看到的物体的照片,然后用人工智能决定下一个动作,比如抓住那瓶啤酒,把它举到我嘴里。
三:征服每座大山
 名称:The Linx
名称:The Linx
本领:攀登每座山。
与旧的下肢假肢不同,Linx能分辨它什么时候坐在椅子上,什么时候该发大招去登山。
它的重量不到6磅,它依靠七个传感器收集活动和地形的数据,帮助腿部适应新的环境。
四:做粗鲁的手势
 名称:Bebionic
名称:Bebionic
本领:做出粗鲁的手势。
这是唯一一只有气泡指尖的假手--很适合打字和处理微妙的物体(比如鸡蛋)。由于用单个马达为自然运动提供动力,穿戴者可以在瞬间翻转鸡蛋。
五:艺术家机器人

名称:The Michelangelo
本领:绘画杰作
虽然许多假肢有一个僵硬的拇指,Ottobock设计了这种模式,在最粗的手指二次驱动单元使它相反,所以拿起来更容易,尤其是一支画笔。
六:挥舞光剑
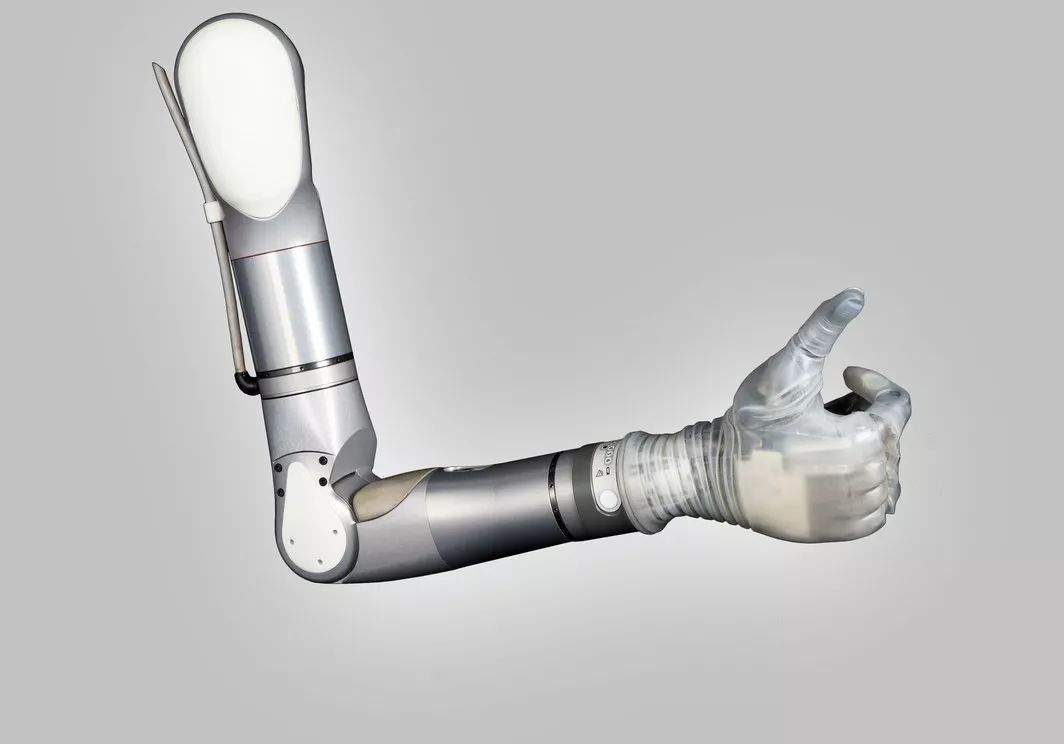
名称:The LUKE Arm
技能:挥舞光剑
动力学进化下假肢是美国食品和药物管理局首先警惕的假体。 胳膊上装有多达10个电机,警队用这个肯定管用。

约访|据说有气质的AI公司都想被AI公司酷约访一下。微信加:623974966
福利|点标题下蓝字,或微信搜“遇见人工智能”,关注后回复"报告",1秒钟获取麦肯锡、德 勤等48份顶级最新AI报告。
遇见人工智能
专注人工智能的首席全媒体
商务合作、转载、投稿请联系微信
▼
623974966
我们近日组建了遇见人工智能观察团社群,每天分享最新的人工智能要闻、新技术、新应用、新观点。
目前微软、百度、腾讯、出门问问、Face++ 、商汤科技、科大讯飞、猎豹移动、物灵等顶级人工智能公司集结,如果感兴趣,可加微信:623974966,备注:遇见人工智能+单位和职位,符合条件,邀您加入。
















 2156
2156











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









