来源:http://www.learnopencv.com/homography-examples-using-opencv-python-c/
单应性变换就是一个平面到另一个平面的映射关系。
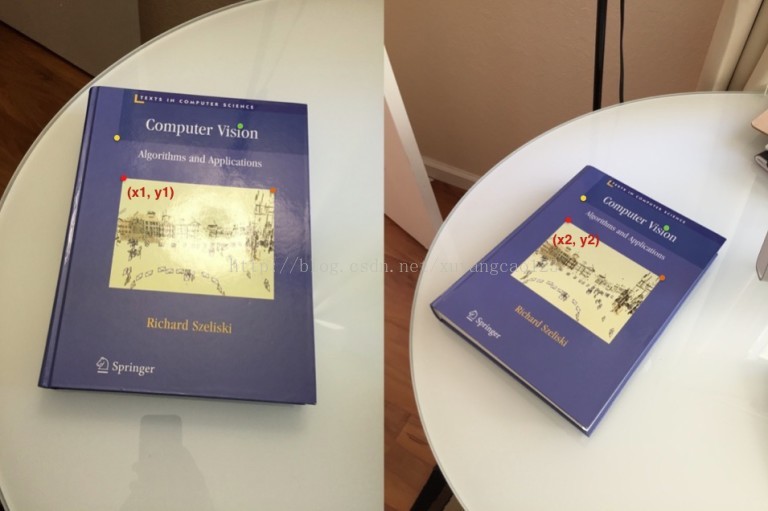
如图,两张图片中相同颜色的点叫做corresponding Points,比如两个红点就是一对corresponding points。单应性矩阵(Homography)就是一个从一张图像到另一张图像映射关系的转换矩阵(3*3)。可以由下面的公式来表示:

以图像中的红点为例,可以将单应性变换写成如下形式:

Python实现:
- import cv2
- import numpy as np
- import pylab as pl
-
- if __name__ == '__main__' :
-
-
-
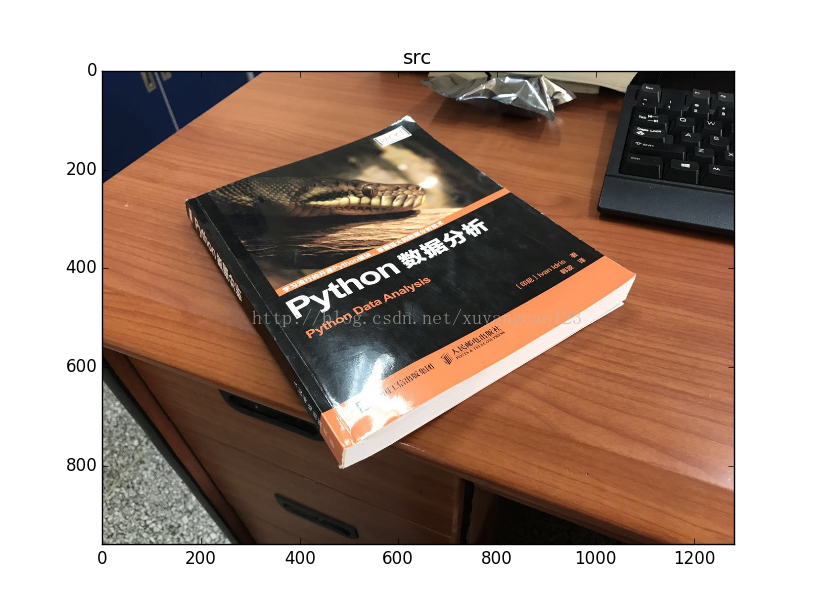
- im_src = cv2.imread('book2.jpg')
-
- pts_src = np.array([[167.0, 264.0], [482.0, 798.0], [1079.0, 403.0],[613.0, 84.0]])
-
-
-
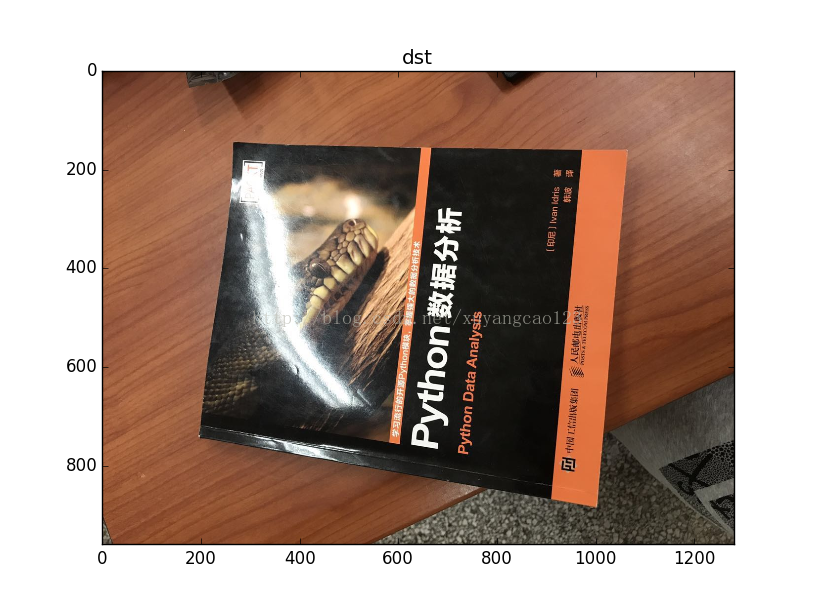
- im_dst = cv2.imread('book1.jpg')
-
- pts_dst = np.array([[193.0, 742.0],[996.0, 874.0],[1059.0, 157.0],[266.0, 145.0]])
-
-
- h, status = cv2.findHomography(pts_src, pts_dst)
-
-
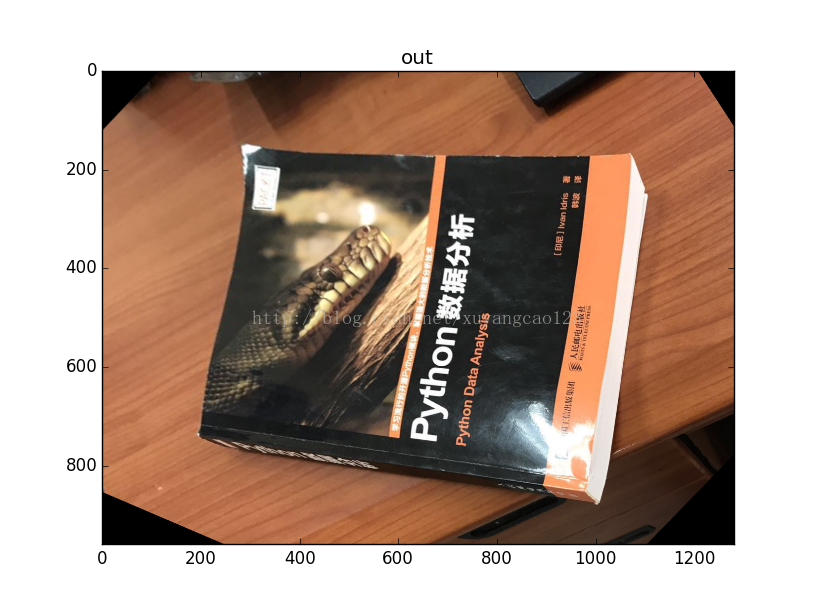
- im_out = cv2.warpPerspective(im_src, h, (im_dst.shape[1],im_dst.shape[0]))
-
- pl.figure(), pl.imshow(im_src[:, :, ::-1]), pl.title('src'),
- pl.figure(), pl.imshow(im_dst[:, :, ::-1]), pl.title('dst')
- pl.figure(), pl.imshow(im_out[:, :, ::-1]), pl.title('out'), pl.show()
结果:
说明:
先通过src、dst两张图像,计算homography,表示为H,然后通过H将src图像 旋转处理为根dst相同的角度,这样第三张图像就是输出out图像,可以看出角度和第二张dst是一样的,但是封面的反光可以看出是 第一张图像src处理得来的























 3620
3620

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









