







本文对DynamicFusion[1]做个简介,注意需要结合笔者上一篇关于KinectFusion的文章共同食用[5]。如有错误,欢迎评论指正。
一.算法流程
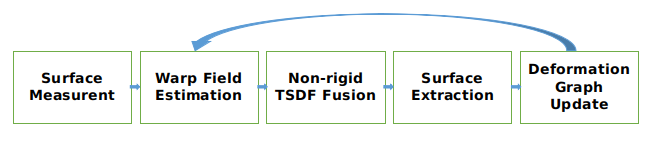
图1.算法流程
相比于KinectFusion,DynamicFusion[1]最大的区别在于引入了Deformation Graph[2],通过Warp Field(包括对应于相机运动的刚性变换,和对应于物体形变的非刚性变换)将Canonicial空间的model变换到Camera空间的frame,从而实现对待重建的动态物体的TSDF场进行更新,最终完成重建。下文着重对与KinectFusion不同的部分做下描述。
二.具体步骤
1.Surface Measurent
与KinectFusion一致,对输入深度图进行金字塔下采样,双边滤波、转点云、计算法线等操作。
2.Warp Field Estimation
1)估计刚性变换矩阵
与KinectFusion一致,采用point2plane icp估计刚性变换矩阵 [3]。此时,源点云为施加了当前估计的Warp Field的Canonicial模型(下一步会介绍)渲染得到的深度图转换得到,目标点云即为当前live frame。
-
注:
1)不是和下面非刚性变换一起解优化问题同时求得的;
2)施加了Warp Field后的Canonicial模型就是点云,为什么还要渲染成深度图,然后再转成点云?据我所知,应该是为了能够用投影法找对应点对,这样比直接搜索两个点云之间的对应点对要快得多,同时也能够复用KinectFusion的代码。
2)估计对应点对
对Canonicial模型中的每个点 ,施加Warp Field定义的变化 ,将其变换到live frame上:
![]()
式1
![]()
式2
![]()
式3
![]()
式4
![]()
式5
-
注:
1)即为上一步估计的刚性变换(注意此时已经更新了,不是第一步施加Warp Field时的刚性变换了),而 为非刚性变换;
2)Warp Field其实就是由一组在Canonicial模型上稀疏采样(常用最远点采样)得到的结点构成,每个结点包含位置、权重、变换矩阵(采用对偶四范数的表示,便于非线性优化; 表示将其转换成我们常见的3x3或者4x4的欧式变换矩阵)三个变量:
![]()
3)对于Canonicial模型上的每个点及其法线 ,利用其k近邻或r半径内的结点,根据式2计算结点的加权平均变换(式2),然后将这个变换施加上去(式4,式5),即可变换到live frame空间。
接下来就和KinectFusion一致了,由于现在Canonicial模型和live frame处于同一空间,我们可以将Canonicial投影到像素空间上,然后在某个小范围(比如3x3邻域)内根据设定的法线夹角阈值,筛选得到对应点对,用于下面非线性最小二乘问题的优化。
3)求解非线性最小二乘优化问题
待优化目标函数如式6、7、8所示。原论文花了大篇幅介绍如何利用高斯牛顿法对上面问题式7的求解,也提及了可用PCG算法进行加速求解。
![]()
式6
![]()
式7

式8
-
注:
1)包含数据项式7和正则项式8,与Deformation Graph一致(指的是误差项是一致的,实际具体构造不太一样:Embeding graph里面每个顶点的更新公式不是像式4这样的加权平均变换得到;Embeding graph采用的变换矩阵是原始的3x3或者4x4的矩阵,所以需要对其额外进行约束)[2];
2)正则项里面涉及到节点之间的连接关系,应该就是利用k近邻或者r半径范围内近邻构建的;
3.Non-rigid TSDF Fusion
1)投影
首先对Canonicial空间TSDF场的每个体素中心,同样按照式7将其变换到live frame空间中得到 。
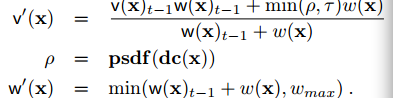
2)更新TSDF
然后按以下公式更新Tsdf场
![]()
式9

式10
式11
式12
-
注:
1)式9,为利用相机参数将投影到像素空间上的位置,据此得到在live frame上得到对应的点,然后和做差得到psdf值;
2)根据式10、式11、式12更新Tsdf场,其中为当前体素的Tsdf值,为当前体素的权重值。
4.Surface Extraction
与KinectFusion一致,利用Marching Cube算法提取网格(当前已重建的模型),或者利用Raycast算法提取点云(当前视角下的点云)。
5.Deformation Graph Update
1)计算新结点
对于更新后的Canonical模型上的每个点 ,利用当前节点 ,由下式计算筛选得到非支持点,对非支持点进行采样得到待插入的deformation graph上的新结点
![]()
式13
-
注:
论文中提及是用simple radius search averaging的方法进行采样得到新结点。
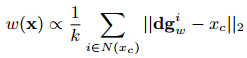
2)计算新结点变换矩阵,并更新整个结点图
根据式14,也就是待插入结点邻域范围内的已有结点的变换矩阵的加权平均,作为待插入结点变换矩阵的初始值.
![]()
式14
![]()
式15
-
注:
这块作者提到了hierarchical deformation tree,不确定意思是不是和金字塔图像一样,指的是较高层的结点是由较低层采样得到的(存疑,欢迎评论指教)。
三.开源实现
笔者目前只推荐[4]中的实现,因为其最为完整,并且提供了求解上面非线性最小二乘问题所需的Jacobi矩阵的详细推导。
四.参考
[1]Richard A Newcombe, Dieter Fox, and Steven M Seitz. Dynamicfusion: Reconstruction and tracking of nonrigid scenes in real-time. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 343–352, 2015
[2]R. W. Sumner, J. Schmid, and M. Pauly. Embedded deformation for shape manipulation. ACM Trans. Graph., 26(3):80,2007
[3]Low, Kok-Lim. "Linear least-squares optimization for point-to-plane icp surface registration."Chapel Hill, University of North Carolina4.10 (2004): 1-3
[4]https://github.com/dolphin-li/DynamicFusion
[5]https://mp.weixin.qq.com/s?__biz=MzI4OTkwODM3NQ==&mid=2247484251&idx=1&sn=bf94e3f027d38055913cf5ec0513e00e&chksm=ec26b0a3db5139b51a880c5851d0cb1aee246004b2bdc0326272d557ba6c5738d9b31bdde907&token=1098252562&lang=zh_CN#rd


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









