







摘要:本文章将b站DR-CAN《16.非线性自适应控制器》所留下的课后习题答案进行了详细补充,具体补充内容为:α估计值求解过程。希望可以通过这篇文章让大家通过数学过程,可以直观看到自适应控制是如何施加在原有非线性反馈控制器之上的。
首先十分感谢 DR-CAN 博士 在[Advanced 控制理论] 16 _Nonlinear Adaptive Controller_非线性自适应控制器的精彩简述,链接如下:【Advanced控制理论】16_Nonlinear Adaptive Controller_非线性自适应控制器_哔哩哔哩_bilibili
DR-CAN 博士在这次课后留下了一道课后题:如图1所示,链接为:16_Nonlinear Adaptive Controller_非线性自适应控制器 答案 - 哔哩哔哩
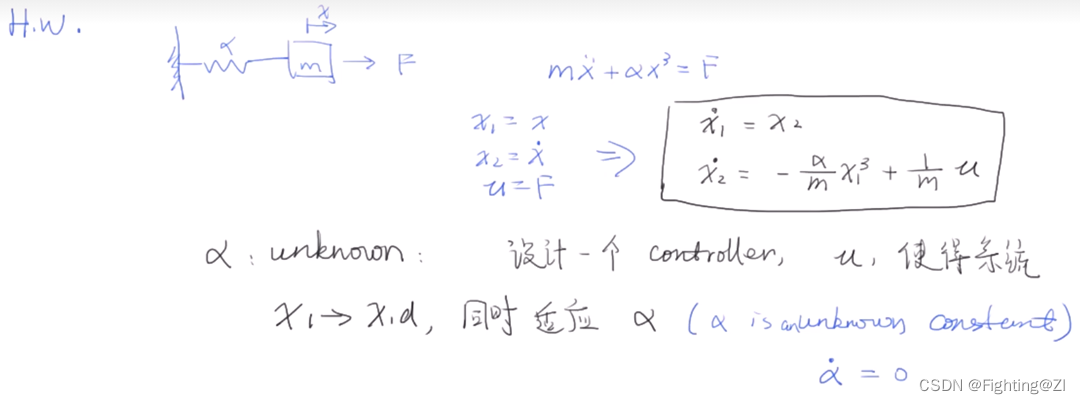
图1: DR-CAN 博
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 729
729











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









