






本文是一篇利用STorM32板子控制三轴云台的经验贴,内容包括从所有的硬件到位开始到pid参数调节完成中的一些经验,完成这一步后,就可以拥有一个稳定的云台了。
本文是基于《STorM32 BGC32Bit 三轴云台控制器V1.31 调参技术手册》进行的硬件调试工作,参考资料来自于http://www.olliw.eu/storm32bgc-wiki/Main_Page(STorM32的社区,里面有英文版的开发资料)
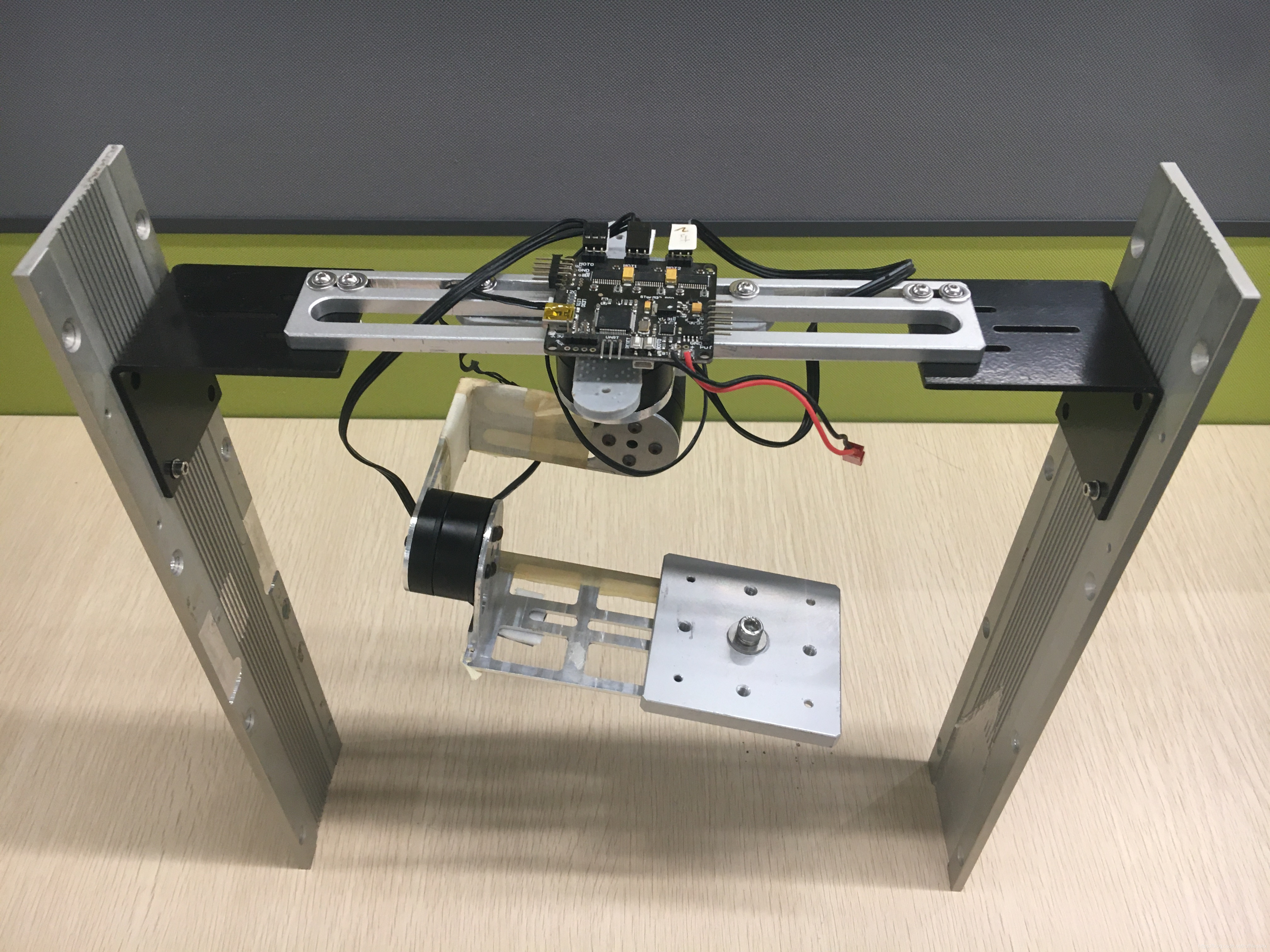
硬件方面,机架和电机要配套,不能电机的功率不够而机架很沉重。买回板子,机架电机,组装的时候最好将机架和板子固定在一个什么地方上,比如像这样,组装好之后要保证相机或者配重块在平衡的位置,所谓平衡的位置就是不用手扶,相机就能端正静止的放在云台上。这样,就可以开始了

第一步刷新固件
买回来的板子应该有某一个版本的固件,但是由于新的固件可能是匹配更新的硬件所以针对买回来的板子应该找自己合适的固件库,固件库下载地址:https://codeload.github.com/olliw42/storm32bgc/zip/refs/heads/master
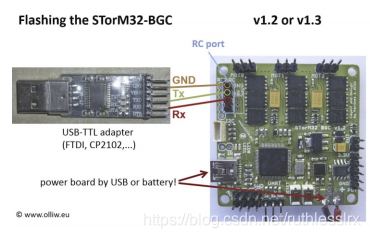
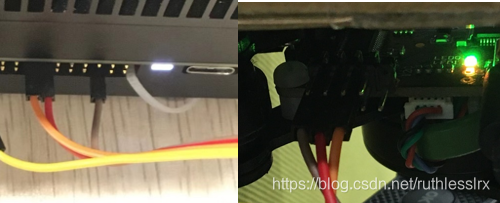
刷新固件需使用FT232 USB-TTL等连接板子和电脑。后面调参数只需要一根usb_mini线就可以了。刷新固件的时候连线像这样
作者尝试了好多次,用太新的固件会导致找不到IMU,太低版本的固件也会出问题,所以思路是买回来板子是0.90的固件,插上电池后会不正常(绿灯一闪一闪)。后来刷新到2.57版本,找不到IMU。又刷回到0.96版本,插电(电池,usbmini)正常。刷新固件的方法见《STorM32 BGC32Bit 三轴云台控制器V1.31 调参技术手册》
刷新固件后,检查插接电池也可以使用稳压模块11.5V左右就可以,同时用mini线连接电脑,看绿灯是不是正常保持。
打开GUI后
第一步:给IMU校正
矫正的时候不要插电池,Calibrate ACC菜单,用一点校正就可以达到很好的效果,用6点校正反而效果不好,校正好了就烧到板子里面(store Calibration)
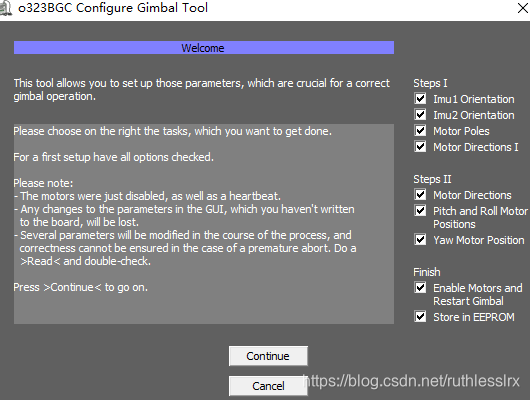
第二步Gimbal Configuration
使用 Configure Gimbal Tool来初始化设置(这一步就是定义板子上的两个IMU分别在什么位置,电机的极数,最开始三个方向的角度是多少等等),其中有一个步骤是需要手动把云台整体连同相机向前倾斜45°(相机,机架要保持相对位置不变,即刚体),这一步就是判断imu的相对位置和方向,然后默认电机级数14,14,14就可以,别的极数可能会出问题,如果你的电机的极数不是14也设置为14也没问题。
如果相机位置改变了,每次要重新给imu矫正后再进入这个设置,调整好了会发出滴滴滴的声音,这一步完成之后就可以正对前方了。如果PID中的Motor Vmax设置为0了,就不能完成,机架设置前要保证有一定的Vmax。
这一步做好后会再次重启电机,机架可能会疯狂抖动,这个时候就把PID菜单中的三个Vmax(就是电机的输出功率)设为0,然后一步一步的调节PID参数
第三部调节PID参数
按照pitch roll yaw的顺序调参,顺序就按照视频中的来就可以,先调微分D,再调比例P,最后积分I,调pitch的时候把其他两个轴的Vmax调0。调节的时候打开 Data Display可以看超调,震荡和平衡时间的长短情况。如图:

调参数注意事项:如果调到了较好的参数,就点击write旁边的对钩,把数据写进板子里面。相当于保存参数;将setup中三个轴的工作模式设置为hold,hold,hold,即与大地保持静止(不管机架怎么动,相机镜头是中朝向一个方向)
Pid调参时,先调俯仰Pitch,再横滚Roll,最后航向yaw先调D,再P最后I
调pid前要将各个轴的Motor Vmax,这个量是电机工作时的功率,也可以理解为电机工作时的转矩,与工作负载有关,相机越重,就需要越大的Vmax。一般来说Yaw的vMax需要稍微比其他两个稍微大一些。
Pitch轴
D:将I,P设为0,给一个D的值比如0.1,手动给电机一个角度,看抖动情况,D太大会有振动噪声,逐渐减小D至恰好没噪声,后面调整PI时如果有噪声就把D再稍微减小一点,目标是没有噪声的 D的最大值。
P:将D保持上一步不变,I设置为5,调节P,效果是P越大,电机转动的会越慢,太大会抖动,不稳定。比如说起始值设为5,增大一定值后开始抖动,在逐渐减小。不同的云台机架结构质量都不同。
I:讲PD保持上两步的值不变。I的作用可以提高回正速度,对照结果调节即可。
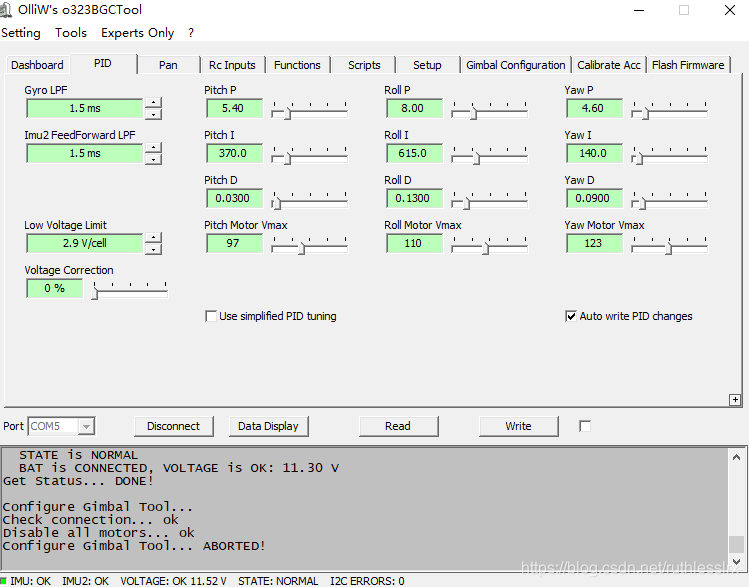
最后作者调参结果如下
可以使用操纵杆控制云台相机的朝向。
操纵杆连线如下:

RcInputs 菜单中如下设置输入io口信息
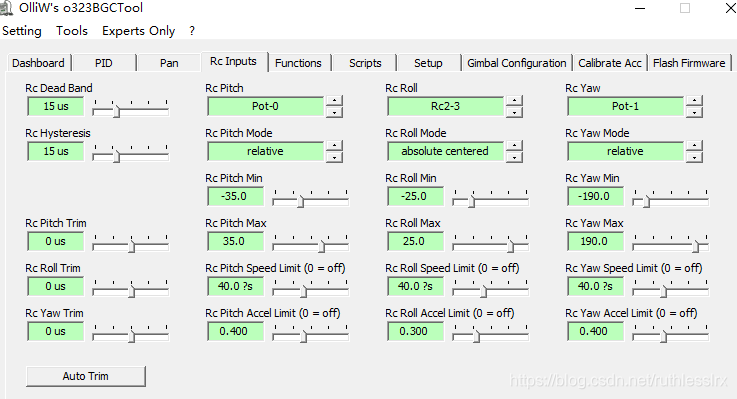

操纵杆前后拨动调节YAW航向
操纵杆左右拨动调节PITCH俯仰
前:俯视云台顺时针转动,后,逆时针转动
左:相机向上转动(天空),右,相机向下转动
由于接入了操纵杆,可能会造成连接上之后,手没动操纵杆但是云台自己旋转的现象,应该是有噪声输入,这个时候使用auto trim。可以自动剪除噪声,如果还是不行,就使用PWM 控制,PWM控制就需要另外的板子了……
Scripts可以预先设定好一些动作集合,比如让云台pitch-10度yaw从0-90分8份转动,每一份可以造作拍照……用操纵杆和PWM都可以启动Scripts
PWM控制云台转角
本文使用的是NVIDIA 的Xavier输出PWM,其实简单的STM32就能输出,控制效果类似。
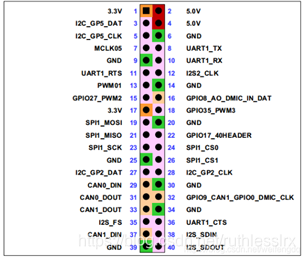
总共连接三根线
GND接RC2-0
P13接到RC2-1
P15接到RC2-2
Xavier的右上角是1号下面一排是从右往左为2468……
打开之前调PID参数的Gui,打开PWM控制
setup菜单
Function菜单
RC-inputs菜单
mode修改为relative后发送的PWM脉冲就会导致电机转动并且PWM脉冲停止后电机不返回初始状态。
如果使用默认的absolute,则需要pwm脉冲一直存在才会让电机不返回原来初始位置。
最后修改一下例程就可以实现控制云台转角了
例程和大多数的PWM控制类似
例程,手册,调参视频,GUI包放在网盘里可以自行下载
链接:https://pan.baidu.com/s/1-I2oGmw8fmYCt9_xV_w6gQ
提取码:4oam
希望这篇文章能对大家有帮助


















 1398
1398

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











