







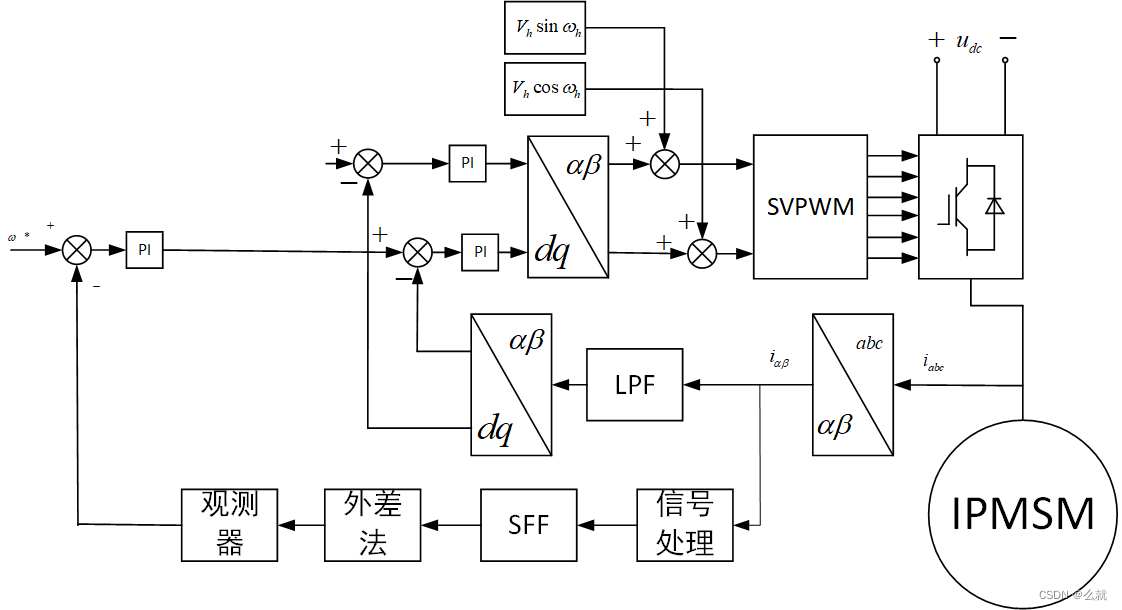
首先分析原理图,这里以高频电压注入为例
转子的位置和转速是通过计算来的,问题是它不带载可以运行且波形完整,为什么带载就不行呢?
那我在这里去掉这个计算部分,以反馈转速和位置直接连上,这样就是用pi的PMSM控制了。运行,带载也可以。这里是给电机内外环pi参数的计算结果:

那么问题就是这些模块,SFF(同步轴系滤波器)和信号处理(带通滤波器)这两个模块功能是提取带有转子位置信号,书上已给滤波器参数。
书上对应的原理图
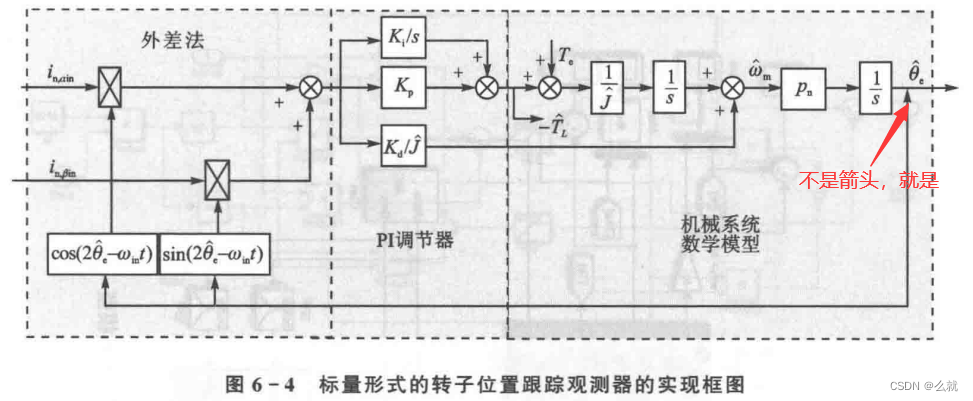
外差法推到:
通过SFF处理后,得到的信号:
![]()

这里需要注意,推到出来的是反馈位置角减去给定角,所以这里有一个隐形的负号,所以由PI整定出来的是-TL。
接着是机械模型:
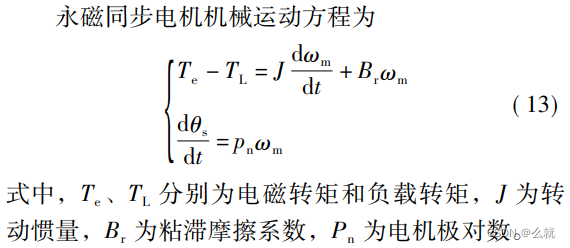
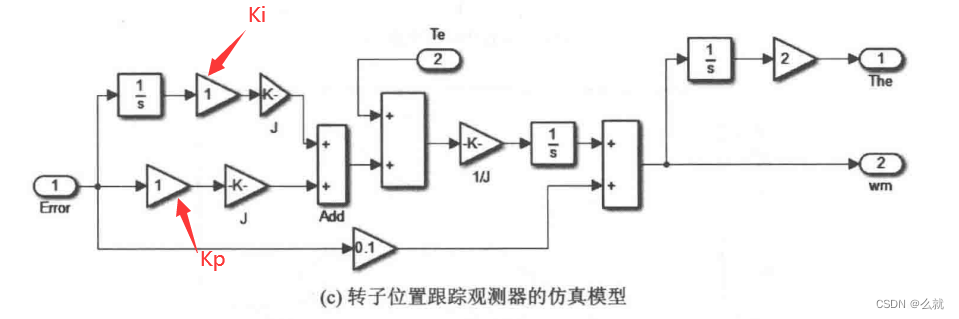
显然这里PI参数Kp和Ki都为1,这个很是问题,在这个怀疑下,那将PI参数Kp和Ki都设为0,发现怎么还能在无负载时跟踪上的,其实,无载时,这里TL=0 ,那么就可得,这样就可以得到跟踪,所以并不是通过将高频信号处理得到电机的位置,最终也导致了加上负载波形就乱。
这里认为:若要这个模型实现可以带载的话,需要修改滤波器,获得带有电机转子位置的信号,然后通过整定PI参数,使其TL跟踪上Te。















 511
511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









