







以box为例
BRepPrimAPI_MakeBox mkBox(10, 10, 10);
TopoDS_Shape aShape = mkBox.Shape();
TopoDS_Shape数据结构
参看:https://www.cnblogs.com/happytik/p/occt_shape_1.html
原文摘录如下:
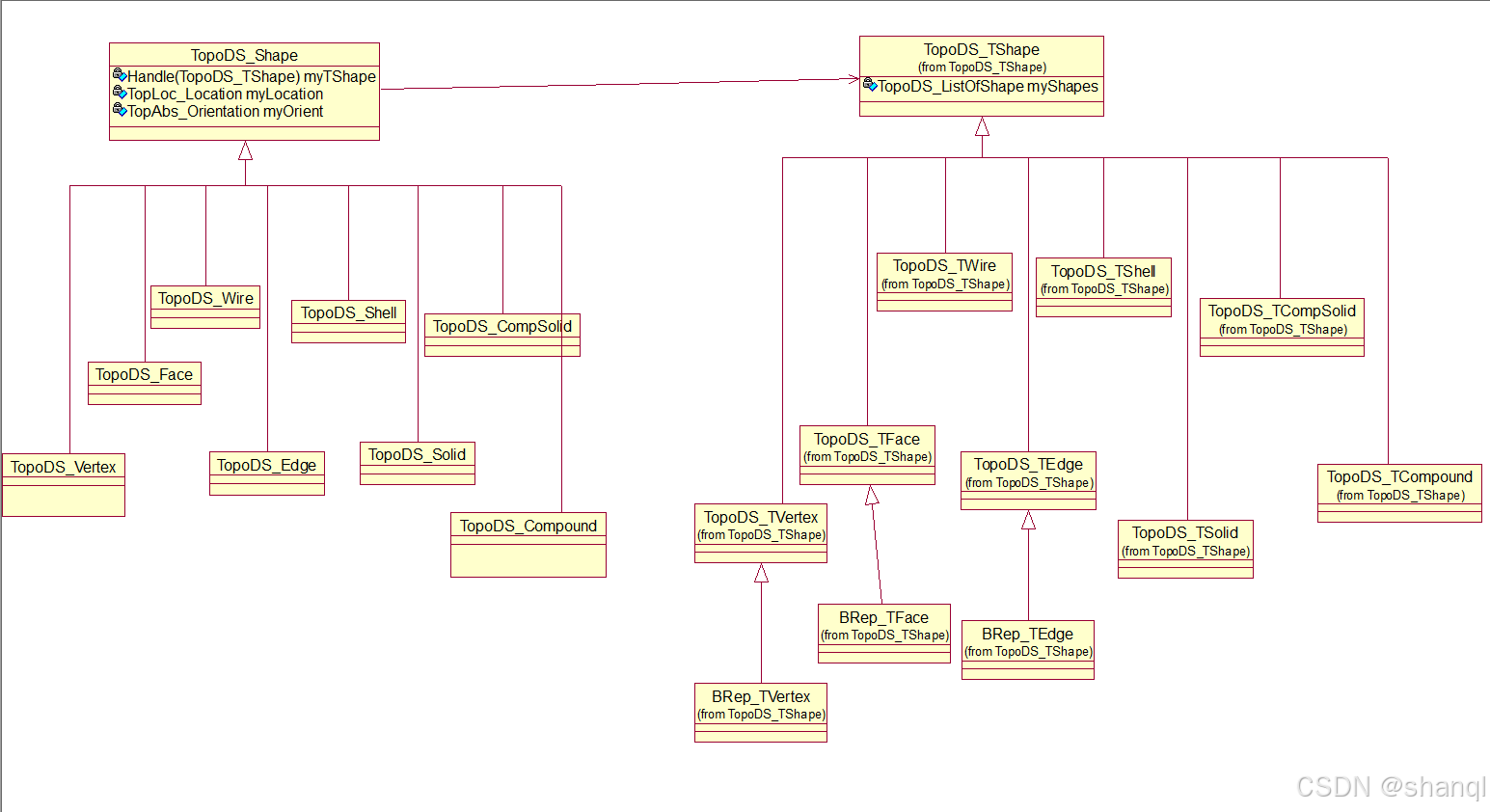
OpenCascade使用TopoDS_Shape类表示一个拓扑对象,这个类记录了拓扑对象的三个主要数据:位置、方向和共享对象,具体由如下三个数据成员表示:
Handle(TopoDS_TShape) myTShape;
TopLoc_Location myLocation;
TopAbs_Orientation myOrient;
可以说,这三个数据成员,充分考虑的共享数据的需求。
1、myTShape字段
首先说,myTShape这个数据成员,是一个句柄指针(共享指针),记录了一个基于引用计数技术共享的TopoDS_TShape派生的对象。该对象记录了拓扑对象的具体数据,包括:拓扑数据和几何数据。例如:这个可能是一个BRep_TEdge对象,记录了一条共边的数据,包括:一条3D曲线、曲线的参数范围等等数据,或者可能是BRep_TFace对象,记录了一个曲面对象及其相关数据。另外,TopoDS_TShape记录了子对象的链表,等等。
这里,使用句柄指针,就是为了方便共享,例如:对拓扑对象中的两个有向边,通常公用一个共边,这里myTShape中就记录了共边对象及其数据。
2、myOrient字段
myOrient记录了拓扑对象的方向。由于OCCT支持non-manifold模型,因此定义了四种类型:
TopAbs_FORWARD,
TopAbs_REVERSED,
TopAbs_INTERNAL,
TopAbs_EXTERNAL
对manifold模型中,通常一个共边对应两个有向边,两个有向边,方向一正一反,对应一个是TopAbs_FORWARD,一个是TopAbs_REVERSED。对Non-manifold模型来说,可能存在一些内部边,或者悬边,另外两个值分别对应这两种情况。对Face来说,Face的法矢方向可能和对应曲面的法矢方向相同(TopAbs_FORWARD),也可能和对应曲面的法矢方向相反(TopAbs_REVERSED),此时使用该数据成员来表示这些情况。
3、myLocation字段
myLocation记录了一个对象的位置信息。
考虑,一个球面被阵列了10次,显然这里球的Face对象除了位置发生了改变,其他(曲面表示、裁剪环等)都是相同的。基于共享的考虑,那么会生成10个TopoDS_Shape对象,每个对象记录相同的BRep_TFace对象,方向可能相同,可能相反,而myLocation记录了如何从原始Face对象经过变换变换到最终对象。
这样,通过共享曲面对象等数据,大大减少了拓扑对象占用内存的大小,减小了模型的大小。同时,由于共享了对象,一些后续的操作(例如查找所有的共边)也得以可行,或者得到简化。
对一个TopoDS_Shape对象,通过在定时器中不断改变位置信息,可以实现简单的动画效果,当然,这个的效率是不高的。
这三个字段构成了OCCT众多拓扑对象处理的基础,也在很多方面决定了一些处理机制。
例如:OCCT的拓扑对象没有回指指针,就是没法从Edge快速的得到Face对象,通过类似:edge->face的操作。通常的途径,是遍历Face中的Edge对象,创建一个Edge和关联face的表,通过查表得到所邻接的Face对象,这个在很多处理中会影响到效率,增加编码实现的复杂性。
另外,TopoDS_Shape对象也没有办法记录一些属性信息,例如:拓扑对象的颜色信息,缺乏Parasolid类似的attrib列表机制。这个也导致一些处理上的复杂性,例如:step导入时,要读取对象的颜色、图层等信息,就相对复杂了。
TopoDS_Shape与TopoDS_TShape的关系类图
TopoDS_Shape的HashCode
以下俩成员,作为生成hashCode的主要元素
- Handle(TopoDS_TShape) myTShape;
- TopLoc_Location myLocation;
方向成员TopAbs_Orientation myOrient;不参与HashCode的生成。
访问顶点
第一种遍历方式拿到的是体构建的TopoDS_Face、TopoDS_Edge、TopoDS_Vertex的数量;
第二种遍历方式拿到的是体构建的BRep_TFace、BRep_TEdge、BRep_TVertex的数量(最终展现形式还是TopoDS_Face、TopoDS_Edge、TopoDS_Vertex)。 举个例子:以BOX为例 TopExp_Explorer 遍历出48个顶点、24条边、6片面; TopExp遍历出8个顶点、12条边、6片面
//第一种遍历方式拿到的是体构建的TopoDS_Face、TopoDS_Edge、TopoDS_Vertex的数量;
//第二种遍历方式拿到的是体构建的BRep_TFace、BRep_TEdge、BRep_TVertex的数量(最终展现形式还是TopoDS_Face、TopoDS_Edge、TopoDS_Vertex)。
//举个例子:以BOX为例
//TopExp_Explorer 遍历出48个顶点、24条边、6片面;
//TopExp遍历出8个顶点、12条边、6片面;
//第一种遍历方式
TopExp_Explorer aExp;
int i = 1;
for (aExp.Init(aShape, TopAbs_VERTEX); aExp.More(); aExp.Next(), ++i )
{
const TopoDS_Vertex& aVertex = TopoDS::Vertex(aExp.Current());
gp_Pnt aPnt = BRep_Tool::Pnt(aVertex);
std::cout << "vertex " << i << ": (" << aPnt.X() << ", " << aPnt.Y()
<< ", " << aPnt.Z() << "), vertex's hash code is "
<< aVertex.HashCode(INT_MAX) << std::endl;
}
//第二种遍历方式
TopTools_IndexedMapOfShape aVertexMap;
TopExp::MapShapes(aShape, TopAbs_VERTEX, aVertexMap);
cout << "vertex count is " << aVertexMap.Extent() << std::endl;
for (int i = 1; i <= aVertexMap.Extent(); ++i)
{
const TopoDS_Vertex& aVertex = TopoDS::Vertex(aVertexMap(i));
gp_Pnt aPnt = BRep_Tool::Pnt(aVertex);
std::cout << "vertex " << i << ": (" << aPnt.X() << ", " << aPnt.Y()
<< ", " << aPnt.Z() << "), vertex's hash code is "
<< aVertex.HashCode(INT_MAX) << std::endl;
}
访问边
//第一种遍历方式拿到的是体构建的TopoDS_Face、TopoDS_Edge、TopoDS_Vertex的数量;
//第二种遍历方式拿到的是体构建的BRep_TFace、BRep_TEdge、BRep_TVertex的数量(最终展现形式还是TopoDS_Face、TopoDS_Edge、TopoDS_Vertex)。
//举个例子:以BOX为例
//TopExp_Explorer 遍历出48个顶点、24条边、6片面;
//TopExp遍历出8个顶点、12条边、6片面;
//第一种遍历方式
TopExp_Explorer aExp;
int i = 1;
for (aExp.Init(aShape, TopAbs_EDGE); aExp.More(); aExp.Next(), ++i )
{
const TopoDS_Edge& aEdge = TopoDS::Edge(aExp.Current());
const TopoDS_Vertex& aFirstVertex = TopExp::FirstVertex(aEdge);
const TopoDS_Vertex& aLastVertex = TopExp::LastVertex(aEdge);
}
//第二种遍历方式
TopTools_IndexedMapOfShape aEdgeMap;
TopExp::MapShapes(aShape, TopAbs_EDGE, aEdgeMap);
cout << "edge count is " << aEdgeMap.Extent() << std::endl;
for (int i = 1; i <= aEdgeMap.Extent(); ++i)
{
const TopoDS_Edge& aEdge = TopoDS::Edge(aEdgeMap(i));
const TopoDS_Vertex& aFirstVertex = TopExp::FirstVertex(aEdge);
const TopoDS_Vertex& aLastVertex = TopExp::LastVertex(aEdge);
Standard_Real fBegin = 0, fEnd = 0;
Handle(Geom_Curve) hCurve = BRep_Tool::Curve(aEdge, fBegin, fEnd);
if (!hCurve.IsNull())
{
//边是条几何线,如直线、椭圆线、贝塞尔曲线等等
//散列化,进行取点
float fLen = float(fEnd - fBegin);
int ulNbOfPoints = 30;
for (int i = 0; i < ulNbOfPoints; i++)
{
const gp_Pnt& ptPoint = hCurve->Value(fBegin + (fLen * float(i)) / float(ulNbOfPoints - 1));
}
continue;
}
TopLoc_Location locPolygon;
Handle(Poly_Polygon3D) hPolygon3D = BRep_Tool::Polygon3D(aEdge, locPolygon);
if (!hPolygon3D.IsNull())
{
//边是条多段线(曲线的近似表示)
Standard_Integer nNodeCount = hPolygon3D->NbNodes();
const TColgp_Array1OfPnt& mNodes = hPolygon3D->Nodes();
for (int i = 1; i <= nNodeCount; ++i)
{
const gp_Pnt& ptPoint = mNodes(i);
}
}
}
附上occ中几何曲线的类层次

面的访问
//拆分三角形
Bnd_Box bounds;
BRepBndLib::Add(aShape, bounds);
bounds.SetGap(0.0);
Standard_Real xMin, yMin, zMin, xMax, yMax, zMax;
bounds.Get(xMin, yMin, zMin, xMax, yMax, zMax);
Standard_Real deflection = ((xMax - xMin) + (yMax - yMin) + (zMax - zMin)) / 300.0 *0.5;
BRepMesh_IncrementalMesh(aShape, deflection, false);
//第一种遍历方式拿到的是体构建的TopoDS_Face、TopoDS_Edge、TopoDS_Vertex的数量;
//第二种遍历方式拿到的是体构建的BRep_TFace、BRep_TEdge、BRep_TVertex的数量(最终展现形式还是TopoDS_Face、TopoDS_Edge、TopoDS_Vertex)。
//举个例子:以BOX为例
//TopExp_Explorer 遍历出48个顶点、24条边、6片面;
//TopExp遍历出8个顶点、12条边、6片面;
//第一种遍历方式
TopExp_Explorer aExp;
int i = 1;
for (aExp.Init(aShape, TopAbs_FACE); aExp.More(); aExp.Next(), ++i )
{
const TopoDS_Edge& aEdge = TopoDS::Edge(aExp.Current());
const TopoDS_Vertex& aFirstVertex = TopExp::FirstVertex(aEdge);
const TopoDS_Vertex& aLastVertex = TopExp::LastVertex(aEdge);
}
//第二种遍历方式
TopTools_IndexedMapOfShape aFaceMap;
TopExp::MapShapes(aShape, TopAbs_FACE, aFaceMap);
cout << "face count is " << aFaceMap.Extent() << std::endl;
for (int i = 1; i <= aFaceMap.Extent(); ++i)
{
const TopoDS_Face& curFace = TopoDS::Face(aFaceMap(i));
BRepAdaptor_Surface adaptorSurface(curFace);
GeomAbs_SurfaceType surfaceType = adaptorSurface.GetType();
//GeomAbs_Plane,
//GeomAbs_Cylinder,
//GeomAbs_Cone,
//GeomAbs_Sphere,
//GeomAbs_Torus,
//GeomAbs_BezierSurface,
//GeomAbs_BSplineSurface,
//GeomAbs_SurfaceOfRevolution,
//GeomAbs_SurfaceOfExtrusion,
//GeomAbs_OffsetSurface,
//GeomAbs_OtherSurface
//前面对面进行了三角化(BRepMesh_IncrementalMesh)
//此处可以取出三角面信息
TopLoc_Location aLoc;
Handle(Poly_Triangulation) mesh = BRep_Tool::Triangulation(
curFace, aLoc);
if (mesh.IsNull())
{
continue;
}
const Poly_Array1OfTriangle& mTriangles = mesh->Triangles();
const TColgp_Array1OfPnt& mNodes = mesh->Nodes();
for (int g = 1; g <= mesh->NbTriangles(); g++)
{
// Get the triangle
Standard_Integer N1, N2, N3;
mTriangles(g).Get(N1, N2, N3);
// change orientation of the triangles
if (curFace.Orientation() != TopAbs_FORWARD) {
Standard_Integer tmp = N1;
N1 = N2;
N2 = tmp;
}
gp_Pnt V1 = mNodes(N1);
gp_Pnt V2 = mNodes(N2);
gp_Pnt V3 = mNodes(N3);
if (!aLoc.IsIdentity())
{
V1.Transform(aLoc.Transformation());
V2.Transform(aLoc.Transformation());
V3.Transform(aLoc.Transformation());
}
}
//.....
}
附上occ中几何面的类层次

Wire、Shell、Solid的访问
与上文类似

















 2678
2678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









