







毫米波雷达因其高精度、强抗干扰能力和全天候工作特性,在自动驾驶、智能交通和工业自动化等领域得到了广泛应用。FMCW技术作为毫米波雷达的核心测距方法,通过发射频率随时间线性变化的连续波信号,并分析反射信号的频率差,实现了高精度的距离测量。本文将深入探讨FMCW测距的原理、实现方法及其在实际应用中的表现。
FMCW测距原理
FMCW信号模型
FMCW信号是一种频率随时间线性变化的连续波信号,通常采用锯齿波或三角波调制。其数学表达式为:
其中:
-
:起始频率
-
:信号带宽
-
:调制周期
测距原理
当FMCW信号遇到目标并反射回来时,接收信号与发射信号之间存在时间延迟(),该延迟与目标距离成正比:
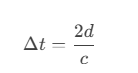
其中:
-
:目标距离
-
:光速
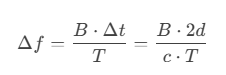
由于发射信号的频率随时间线性变化,时间延迟会导致接收信号与发射信号之间存在频率差():
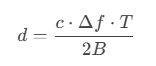
通过测量频率差 ,可以计算出目标距离:
FMCW测距的信号处理流程
信号发射与接收
-
发射信号:频率随时间线性增加的连续波信号。
-
接收信号:目标反射的信号,与发射信号存在时间延迟和频率差。
混频与差频提取
将发射信号与接收信号进行混频,得到中频信号(IF信号),其频率即为频率差 。
频率差测量
对中频信号进行傅里叶变换(FFT),提取频率差。
距离计算
根据频率差 和已知参数(带宽 B、调制周期 T、光速
),计算目标距离
。
FMCW测距的关键技术挑战
频率线性度
FMCW信号的频率线性度直接影响测距精度。非线性调制会导致频率差测量误差。
多目标分辨
在多目标场景下,反射信号的频率差可能重叠,需要通过高分辨率FFT或高级算法(如MUSIC)进行分辨。
抗干扰能力
FMCW系统需要应对多径效应和环境噪声的干扰,通常通过信号处理和硬件设计提高抗干扰能力。
FMCW测距的应用案例
自动驾驶
-
自适应巡航控制(ACC):通过FMCW雷达实时测量前方车辆的距离和速度,实现自动跟车。
-
盲点检测:检测车辆侧后方的障碍物,提高驾驶安全性。
工业自动化
-
AGV导航:在自动导引车中使用FMCW雷达进行障碍物检测和路径规划。
-
液位测量:在储罐中使用FMCW雷达测量液位高度。
消费电子
-
智能家居:通过FMCW雷达实现人体检测和手势识别。
-
无人机避障:在无人机中使用FMCW雷达进行高度测量和障碍物检测。
FMCW技术作为毫米波雷达的核心测距方法,具有高精度、强抗干扰能力和广泛的应用前景。通过优化信号处理算法和硬件设计,可以进一步提升FMCW系统的性能。未来,随着毫米波雷达技术的不断发展,FMCW测距将在自动驾驶、工业自动化和消费电子等领域发挥更加重要的作用。
参考文献
-
Richards, M. A. (2014). Fundamentals of Radar Signal Processing. McGraw-Hill Education.
-
Texas Instruments. (2020). AWR1642 Millimeter Wave Radar Sensor Datasheet.
-
Skolnik, M. I. (2001). Introduction to Radar Systems. McGraw-Hill.
-
Zephyr Project Documentation. Zephyr Project Documentation — Zephyr Project Documentation


















 1825
1825

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









