






1.车载传感器
1.SELF/ GPS
2.AIR sensor:雷达,激光,超声,相机
3.天线/DSRC协议(还有SAE J2735 BSM协议):V2V,V2I(V2X)
4.Beacon/OBU:V2I
其中,AIR sensor主要包括:
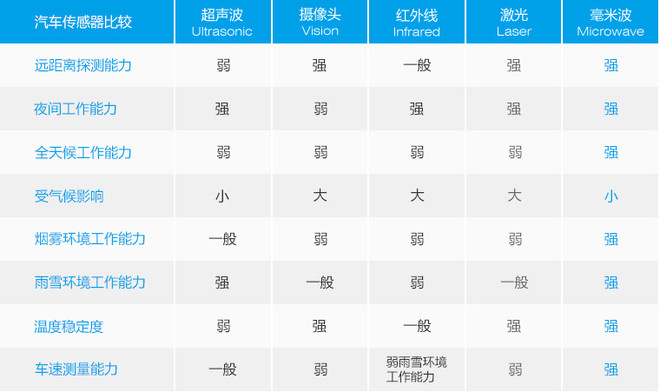
距离传感器:雷达。radar,radio detection and ranging无线电探测和测距。雷达频段分,可分为超视距雷达、微波雷达、毫米波雷达以及激光雷达等。其中无人驾驶常用雷达为:毫米波雷达,激光雷达,超声雷达。
光学传感器:车载摄像头
位置传感器:IMU,GNSS

| 超声雷达 | 激光雷达 | 毫米波雷达 | |||||||
| 本质 | 机械振动波 | 电磁波,光粒子发射 | 电磁波,电磁辐射 | ||||||
| 频率 | 40kHz | 10-200GHz | |||||||
| 范围 | |||||||||
| 优点 | |||||||||
| 缺点 | |||||||||
| 应用 |
2.超声雷达
2.1工作原理
2.1.1 距离测量:TOF

2.1.2 位置测量(角度测量):三角定位
2.2 数学模型
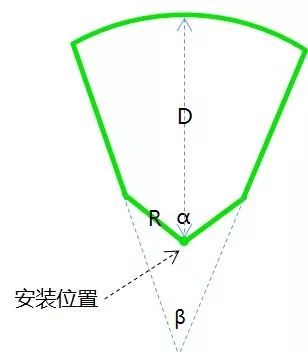
α——超声波雷达的探测角,一般UPA的探测角为120°左右,APA的探测角比UPA小,大概为80°。
β——超声波雷达检测宽度范围的影响因素之一,该角度一般较小。UPA的β角为20°左右,APA的β角比较特殊,为0°。
R——超声波雷达检测宽度范围的影响因素之一,UPA和APA的R值差别不大,都在0.6m左右。
D——是超声波雷达的最大量程。UPA的最大量程为2米~2.5米,APA的最大量程至少是5米,目前已有超过7m的APA雷达在业内使用。
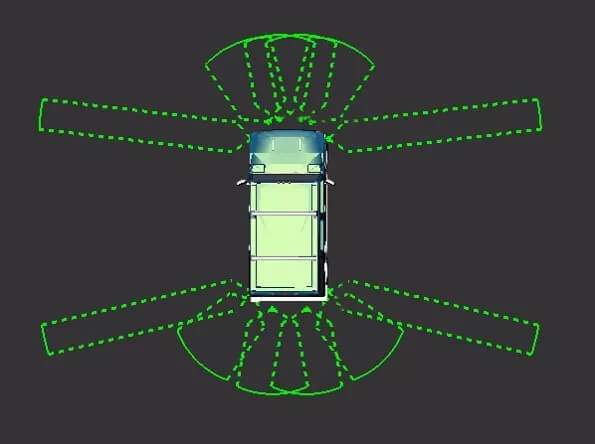
2.3 应用场合:泊车(APA,AVP);高速巡航(Tesla)
2.4 企业
1.博世
2.法雷奥:路虎、起亚、大众途安
3.同致电子:上海通用、上海大众、东风日产、上海汽车、神龙汽车、奇瑞汽车、吉利汽车、福特汽车
4.奥迪威
3.毫米波雷达
3.1原理:TOF(不实用,时间太短),FMCW(实用)
3.1.1 距离测量
当目标物体是相对静止的,发射信号碰到目标物体后被反射回来,产生回波信号,回波信号与发射信号形状相同,只是在时间上延迟了τ(τ=2R/c),式中:R-目标物体的距离;c-光速。

发射信号与回波信号的频率差即为混频输出的中频信号频率f0,根据相似三角形的关系,由上图(a)可以得出:

从上式中可以看出,在调制周期T 和调频带宽确定的情况下,目标距离与LFMCW 雷达前端混频器输出的中频信号频率成正比,这就是目标物体处于相对静止的情况下LFMCW 雷达测距原理。
从上式中可以看出,在调制周期T 和调频带宽确定的情况下,目标距离与LFMCW 雷达前端混频器输出的中频信号频率成正比,这就是目标物体处于相对静止的情况下LFMCW 雷达测距原理。

从上图中可以看出,三角波的上升沿和下降沿中频信号的频率可分别表示如下:
fb+=f0 -fd
fb-=f0 +fd
上两式中为目标物体相对静止时中频信号的频率,为多普勒频移。由距离公式R和多普勒频移公式可得:

由上述公式可以看出,毫米波雷达信号中频频率fb的确定是求出R、V的关键。
3.1.2 近似定位: 波束角小(3-5°)
3.2 应用
3.2.1 SRR(24GHz)

1.BSD-盲点检测-10m
2.LCA-变道辅助-70m
3.PA-泊车辅助-5m
4.S&G-自动跟车-70m
5.PCTA-倒车警示-70m
6.AEB-自动紧急刹车
3.2.2 LRR(70GHz)

1.ACC-自适应巡航-150-200m
2.FCW-安全车距预警
3.3 应用示例
新奥迪A4采用5个毫米波雷达(1长+4短),奔驰的S级采用7个毫米波雷达(1长+6短)。

以自动跟车型(Stop & Go)ACC功能为例,一般需要3个毫米波雷达。车正中间一个77GHz的LRR,探测距离在150-250米之间,角度为10度左右;车两侧各一个24GHz的MRR,角度都为30度,探测距离在50-70米之间。AEB是最有实际意义的ADAS功能,未来会成为中高档汽车的标配,需要1个77GHz LRR。
3.5 企业

全球前四大的毫米波雷达供应商被称为“ABCD”,即 Autoliv(美安)、Bosch(博世)、Continental(大陆)和 Delphi(德尔福)。这几家年出货量总和达到千万级别,且价格相对合理。

TI的IWR1642BOOST。
4.激光雷达
5.车载摄像头
6.IMU
7.GNSS
参考:https://lt.cjdby.net/thread-2469675-1-1.html














 1348
1348











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









