





 在对扩展卡尔曼滤波(EKF)和互补滤波进行姿态解算的仿真研究中,发现两者在误差范围内表现接近,通常在0-1度之内。虽然所使用的传感器型号不同,无法直接评判算法优劣,但当过程发生变化时,互补滤波能展现出更好的动态响应。这两种滤波算法在实际应用中各有特点,适应不同的系统需求。
在对扩展卡尔曼滤波(EKF)和互补滤波进行姿态解算的仿真研究中,发现两者在误差范围内表现接近,通常在0-1度之内。虽然所使用的传感器型号不同,无法直接评判算法优劣,但当过程发生变化时,互补滤波能展现出更好的动态响应。这两种滤波算法在实际应用中各有特点,适应不同的系统需求。
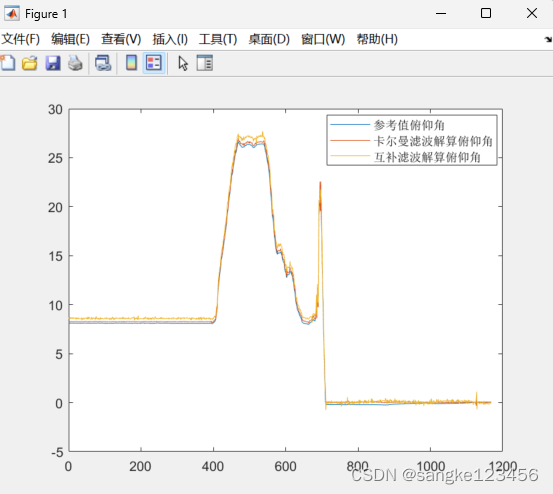
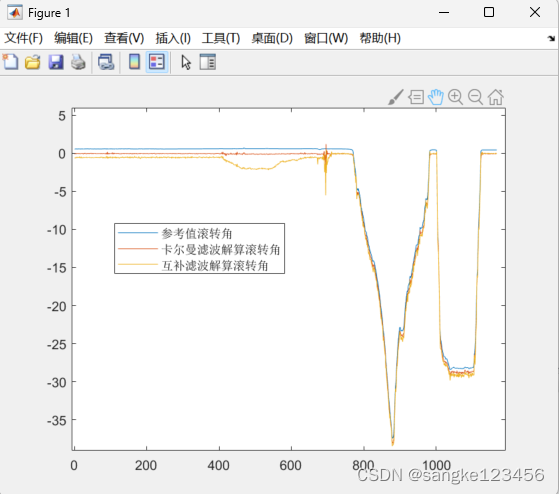
最近针对扩展卡尔曼滤波和互补滤波二者关于姿态解算进行学习,在仿真结果发现二者基本上相差不是很大,保持在0-1度误差范围之内,由于传感器也是不同型号的,二者算法好坏不做评价。但针对过程变化时可以发现,互补滤波有相应的变化。
扩展卡尔曼滤波算法与互补滤波算法关于姿态信息解算对比如下
扩展卡尔曼滤波算法与互补滤波算法关于姿态信息解算对比

于 2023-05-12 11:31:17 首次发布
最近针对扩展卡尔曼滤波和互补滤波二者关于姿态解算进行学习,在仿真结果发现二者基本上相差不是很大,保持在0-1度误差范围之内,由于传感器也是不同型号的,二者算法好坏不做评价。但针对过程变化时可以发现,互补滤波有相应的变化。
扩展卡尔曼滤波算法与互补滤波算法关于姿态信息解算对比如下
 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























