






简介
SPI 全称为Serial Peripheral interface(串行外设接口),串行同步通讯。SPI是一种高速的,全双工(同时发送和接收),同步的通信总线,并且在芯片的管脚上只占用四根线,可以节约管脚,节省空间。SPI主要应用在 EEPROM,FLASH,ADC/DAC,还有数字信号处理器和数字信号解码器之间。
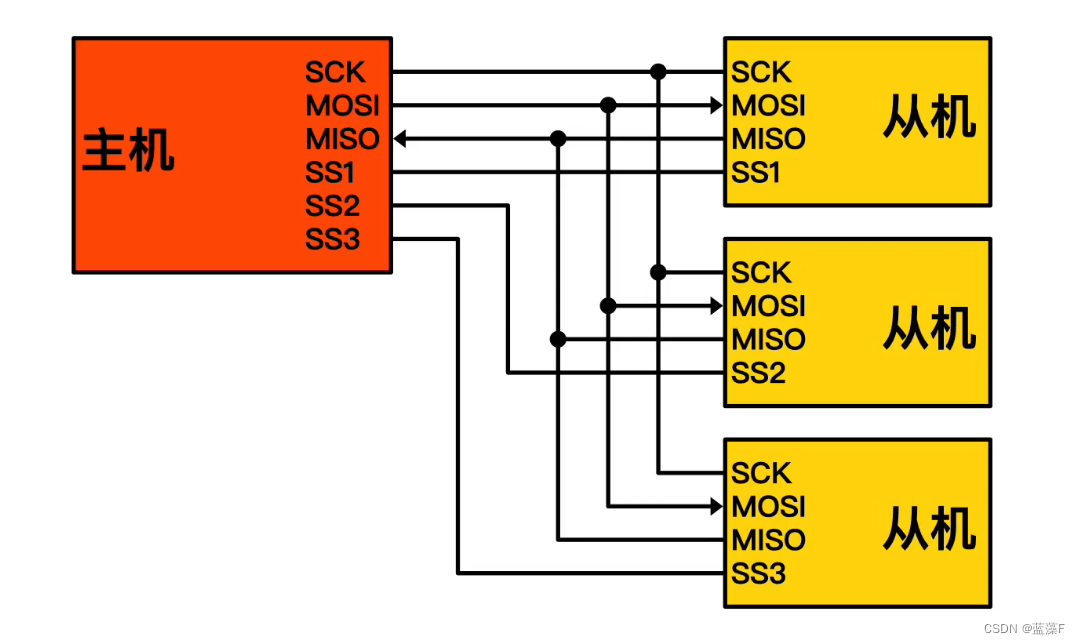
一主多从
一个SPI通讯系统包含一个(且只能是一个)主设备,一个或多个从设备。主设备提供SPI时钟,且都是由主设备发起读写操作。当存在多个从设备时,通过各自的片选信号进行管理。
SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。
四条信号线
- 片选信号线:CS/SS 大部分都是低电平有效,具体要看连接的芯片手册
- 时钟信号线:SCK 主设备产生
- 发送信号线:MOSI
- 接收信号线:MISO
工作模式
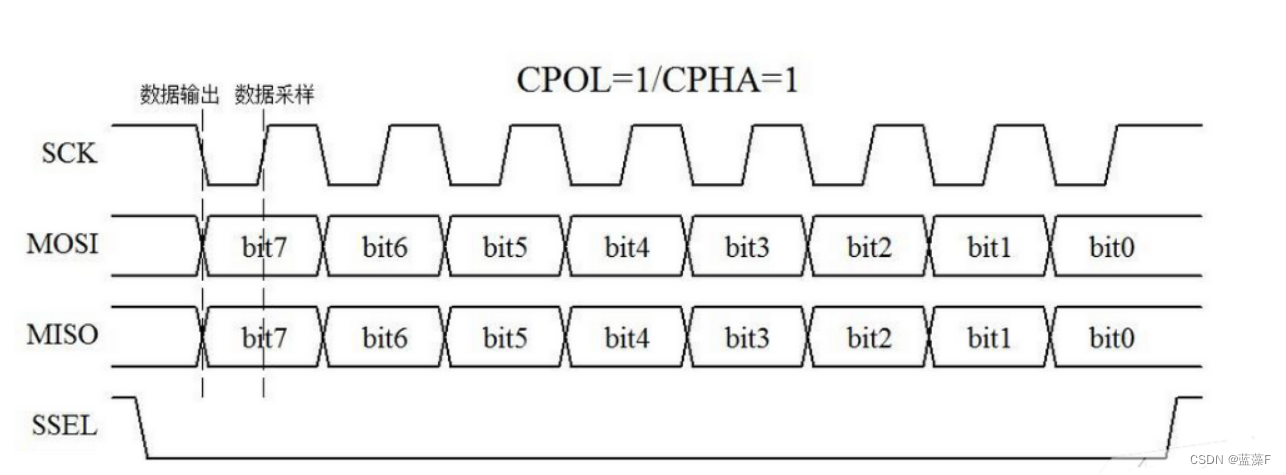
SPI工作模式共有四种,不同点在于时钟空闲时的电平状态和在第几个时钟沿采集数据。
时钟极性(CPOL)定义了时钟空闲状态电平:
- CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
- CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
时钟相位(CPHA)定义数据的采集时间。
- CPHA=0,在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。
- CPHA=1,在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。
四种工作模式列成表格如下:
| SPI Mode | CPOL | CPHA |
| 0 [00] | 0 | 0 |
| 1 [01] | 0 | 1 |
| 2 [10] | 1 | 0 |
| 3 [11] | 1 | 1 |
以工作模式3为例,时序图如下:
优缺点
主从设备必须使用相同的工作模式才能正常工作。如果有多个从设备,并且它们使用了不同的工作模式,那么主设备必须在读写不同从设备时重新修改对应从设备的模式。
SPI没有规定最大传输速率,没有地址方案,也没规定通信应答机制,没有规定流控制规则。只要四根信号线连接正确,SPI模式相同,将CS/SS信号线拉低,即可以直接通信。
SPI优点在于:
- 全双工串行通信;
- 高速数据传输速率;
- 简单的软件配置;
- 数据位宽灵活,可以是任意大小的字;
SPI缺点在于:
- 没有硬件从机应答信号;
- 只允许一个主设备;
- 使用四根信号线(I2C和UART使用两根信号线)
- 没有定义错误检查协议;
- 与RS-232和CAN总线相比,只能支持非常短的距离;
verilog代码实现
实现思路是用一个1bit计数器,假设spi_clk是系统时钟二分频,计数器每个时钟周期加1,然后发送数据线MOSI检测到计数器为1或者0时改变数据,这样就能实现数据在spi_clk时钟上升或者下降沿改变,在spi_clk时钟上升或者下降沿采样。

这个代码只简易实现了主机向从机写数据,通过MOSI口输出。如果需要地址,只需要先发送一个要写入的地址,然后再发送要写的数据。也可以加一个判断是写指令还是读指令,如果是读,就执行读操作,反之执行写操作。
`timescale 1ns / 1ps
module spi
#(
parameter P_DATA_WIDTH = 8 ,
parameter P_CPOL = 0 ,
parameter P_CPHA = 0
)(
input i_clk ,
input i_rst ,
output o_spi_clk ,
output o_spi_cs ,
output o_spi_mosi ,
input i_spi_miso ,
input i_user_op_valid ,//操作握手信号
output o_user_op_ready ,//操作握手信号
input [P_DATA_WIDTH - 1 : 0] i_user_write_data //写数据
);
reg ro_spi_clk ;
reg ro_spi_cs ;
reg ro_spi_mosi ;
reg r_run ;
reg r_run_d1 ;
reg r_spi_cnt ;
reg [P_DATA_WIDTH - 1 : 0] r_user_write_data ;
reg ro_user_op_ready ;
wire w_user_active;
assign w_user_active = i_user_op_valid & o_user_op_ready ;
assign o_spi_clk = ro_spi_clk ;
assign o_spi_cs = ro_spi_cs ;
assign o_spi_mosi = ro_spi_mosi ;
assign o_user_op_ready = ro_user_op_ready ;
assign w_run_negedge = !r_run & r_run_d1 ;
//总线运行标志
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
r_run <= 'd0;
else if(w_user_active)
r_run <= 'd1;
else
r_run <= r_run;
end
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
r_run_d1 <= 'd0;
else
r_run_d1 <= r_run;
end
//准备信号
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
ro_user_op_ready <= 'd1;
else if(w_user_active)
ro_user_op_ready <= 'd0;
else if(w_run_negedge) //run下降沿
ro_user_op_ready <= 'd1;
else
ro_user_op_ready <= ro_user_op_ready;
end
//时钟计数器
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
r_spi_cnt <= 'd0;
else if(r_run)
r_spi_cnt <= r_spi_cnt + 1;
else
r_spi_cnt <= 0;
end
//spi时钟
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
ro_spi_clk <= P_CPOL;
else if(r_run)
ro_spi_clk <= ~ro_spi_clk;
else
ro_spi_clk <= P_CPOL;
end
//片选
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
ro_spi_cs <= 'd1;
else if(w_user_active)
ro_spi_cs <= 'd0;
else if(~r_run)
ro_spi_cs <= 'd1;
else
ro_spi_cs <= ro_spi_cs;
end
//写数据
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
r_user_write_data <= 'd0;
else if(w_user_active)
r_user_write_data <= i_user_write_data;
else if( r_spi_cnt)
r_user_write_data <= r_user_write_data << 1;
else
r_user_write_data <= r_user_write_data;
end
//spi输出引脚
always @(posedge i_clk or posedge i_rst) begin
if(i_rst)
ro_spi_mosi <= 'd0;
else if(w_user_active)
ro_spi_mosi <= r_user_write_data[P_DATA_WIDTH - 1];
else if(r_spi_cnt)
ro_spi_mosi <= r_user_write_data[P_DATA_WIDTH - 1]; //串行输出数据
else
ro_spi_mosi <= ro_spi_mosi;
end
endmodule
可以看到输入数据为01010101时数据可以在第一个上升沿采样。















 1613
1613











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









