







SPI通信,在很多场合都可以应用上,现绝大多数单片机都提供了相应的片上外设,可直接应用,在编程方面不需操心太多。有关于SPI特性很多,个人认为,其中比较重要的特性,就是SPI的极性CPOL和相位CPHA的设置。
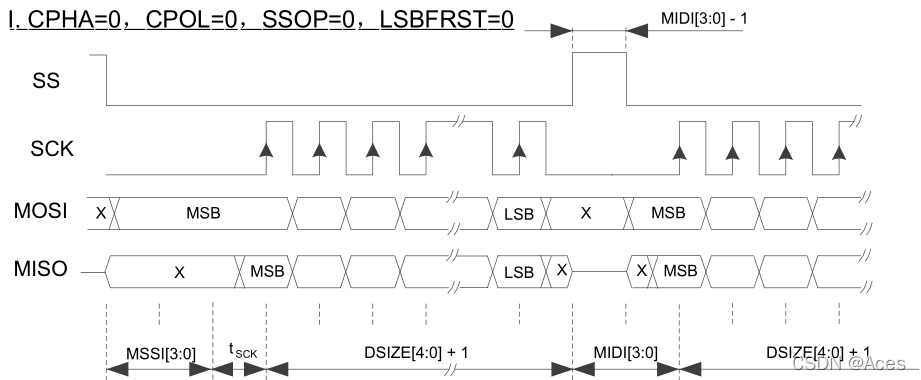
设置不同的CPOL和CPHA,可是SPI有4种不同的工作模式,各种模式时序参见下面时序图,该图来源于STM32系列单片机手册。
工作模式1:时钟默认低电平,在第1个时钟沿采集数据。
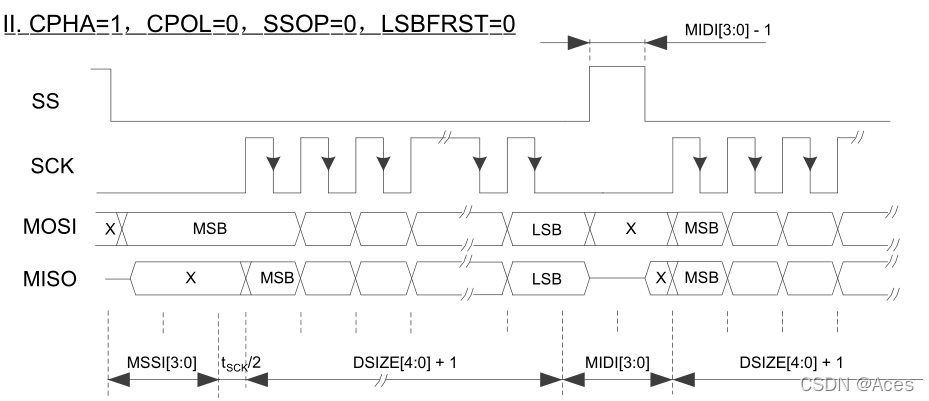
工作模式2:时钟默认低电平,在第2个时钟沿采集数据。
工作模式3:时钟默认高电平,在第1个时钟沿采集数据。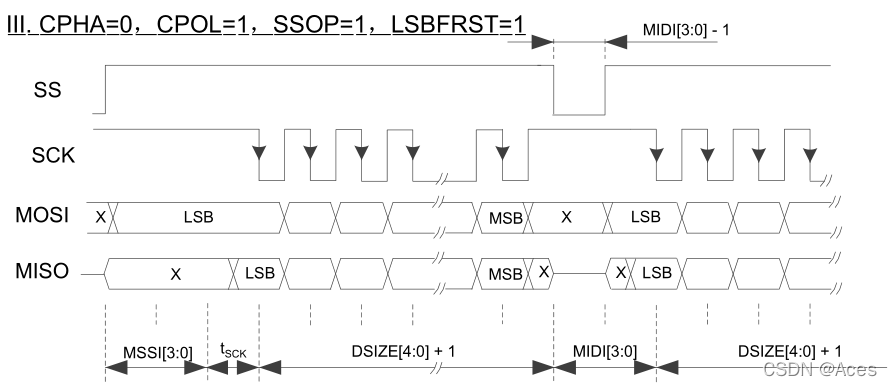
工作模式4:时钟默认高电平,在第2个时钟沿采集数据。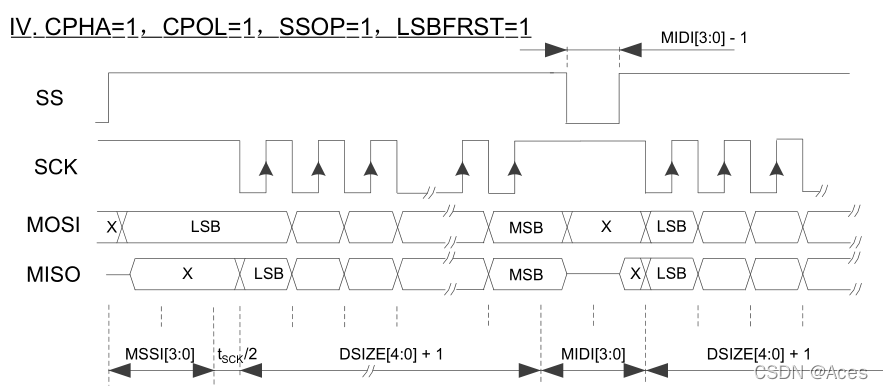 以上为SPI的工作模式,除了工作模式以外,SPI还具有主从特性,主SPI产生时钟信号,从SPI接收主机产生的时钟信号。在全双工通信过程中,SPI的收发是同时进行的,在通信过程中,从时序角度上讲,需要同时处理接收信号和发送信号。
以上为SPI的工作模式,除了工作模式以外,SPI还具有主从特性,主SPI产生时钟信号,从SPI接收主机产生的时钟信号。在全双工通信过程中,SPI的收发是同时进行的,在通信过程中,从时序角度上讲,需要同时处理接收信号和发送信号。
采用FPGA进行SPI通信时,需要对SPI的时序进行理解,以下是FPGA作为从机的SPI通信程序,在此处SPI的工作模式为:CPOL=1,CPHA=1。由于本人初学FPGA,代码之中难免有疏漏。
在最开始调试此代码时,SPI主机接收数据始终不稳定,接收的数据中,偶尔会出现一定的误码(即错误数据),看程序逻辑,似乎也挑不出毛病,在网上借鉴大神们的思想后,指出了CS信号复位的重要性,经此思路,对代码进行修改,问题解决。或许此代码尚有诸多不完善之处,若有大神,请不吝赐教。
此代码经本人实际运行测试,可直接应用。
module SPI_Slave(
input rst_n, // 时钟及复位信号
input clk_200m, // 时钟及复位信号
input cs, // CS输入
input sclk, // SCLK输入
input spi_di, // DI输入
input [7:0] send_data, // 需要发送的数据
input send_flag, // 发送标识,当为高电平时,发送数据
output reg spi_do, // 数据输出DO
output reg [7:0] recv_data, // 接收到的数据
output reg recv_done, // 接收完成标识
output reg send_done // 发送完成标识
);
reg [3:0] recv_sta; // 接收过程状态字
reg [3:0] send_sta; // 发送过程状态字
reg [3:0] recv_cnt; // 接收bit计数
reg [3:0] send_cnt; // 发送bit计数
reg [7:0] recv_tmp; // 接收临时寄存器,接收完成后转存至recv_data
reg [7:0] send_tmp; // 发送临时寄存器,
reg [1:0] cs_sync; // cs状态捕捉
reg [1:0] sclk_sync; // sclk状态捕捉
wire cs_fal; // cs下降沿
wire sclk_ris; // sclk上升沿
wire sclk_fal; // sclk下降沿
// ---- main code ----
assign cs_fal = cs_sync[1:0] == 2'b10; // cs下降沿判断
assign sclk_ris = sclk_sync[1:0] == 2'b01; // sclk上升沿判断
assign sclk_fal = sclk_sync[1:0] == 2'b10; // sclk下降沿判断
// 边沿检测过程块,所有边沿检测均在此执行
always @(posedge clk_200m or negedge rst_n) begin
if(!rst_n) begin
cs_sync <= 2'b11; //cs时钟空闲状态位高电平
sclk_sync <= 2'b11; //sclk时钟空闲状态位高电平,CPOL=1,CPHA=1
end
else begin
cs_sync <= {cs_sync[0], cs};
sclk_sync <= {sclk_sync[0], sclk};
end
end
// 功能描述:SPI接收字节过程块,FPGA运行过程中,不停判断CS低电平,
// 若有数据传输,则接收,当接收满一个字节后置位接收完成标识.
always @(posedge clk_200m or negedge rst_n) begin
if(!rst_n) begin
recv_tmp <= 8'd0;
recv_cnt <= 4'd0;
recv_done <= 1'b0;
recv_sta <= 4'd0;
end
else begin
if (cs_fal) begin // CS下降沿
recv_tmp <= 8'd0;
recv_cnt <= 4'd0;
recv_done <= 1'b0;
recv_sta <= 4'd0;
end
else begin
if (!cs) begin
case (recv_sta)
4'd0: begin // 接收数据准备
recv_tmp <= 8'd0;
recv_cnt <= 4'd0;
recv_done <= 1'b0;
recv_sta <= 4'd1;
end
4'd1: begin
if (sclk_ris) begin // sclk上升沿读取di,移位写入8bit数据
recv_tmp <= {recv_tmp[6:0], spi_di}; // 上升沿(第二个边沿开始)读数据,左移
if(recv_cnt == 4'd7) begin
recv_cnt <= 4'd0;
recv_sta <= 4'd2;
end
else begin
recv_cnt <= recv_cnt + 4'd1;
end
end
end
4'd2: begin
recv_data <= recv_tmp; // 接收8 bits完成,数据转存至recv_data
recv_done <= 1'b1; // 接收完成标识置1
recv_sta <= 4'd3;
end
4'd3: recv_sta <= 4'd0; // 等待1个时钟
default: recv_sta <= 4'd0;
endcase
end // if (!cs) begin
end
end
end
// 功能描述:SPI字节发送过程块,当有数据需要发送时,外部模块置位send_flag
// 当检测到此标识时,发送send_data数据
always @(posedge clk_200m or negedge rst_n) begin
if(!rst_n) begin
send_cnt <= 4'd0;
send_done <= 1'b0;
send_tmp <= 8'd0;
spi_do <= 1'b1;
send_sta <= 4'd0;
end
else begin
if (cs_fal) begin // CS下降沿
send_cnt <= 4'd0;
send_done <= 1'b0;
send_tmp <= 8'd0;
spi_do <= 1'b1;
send_sta <= 4'd0;
end
else begin
if (!cs) begin
case (send_sta)
4'd0: begin // 开始准备发送,等待发送标识控制高电平
if (send_flag) begin // 等待发送标识
send_done <= 1'b0;
send_cnt <= 4'd0;
send_tmp <= send_data; // 转送数据,避免其他模块改写导致数据变化
send_sta <= 4'd1;
end
end
4'd1: begin // 每一个sclk下降沿向spi_do写入一个bit
if (sclk_fal) begin // 等待时钟下降沿
spi_do <= send_tmp[4'd7 - send_cnt];
if(send_cnt == 4'd7) begin
send_cnt <= 4'd0;
send_done <= 1'b1;
send_sta <= 4'd2;
end
else begin
send_cnt <= send_cnt + 4'd1;
end
end
end
4'd2: send_sta <= 4'd3;
4'd3: send_sta <= 4'd0;
default: send_sta <= 4'd0;
endcase
end //if (!cs) begin
end
end
end
endmodule

















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









