







Shading着色

冯氏光照 / Blinn-Phong着色模型:
环境光(常量):颜色 * 强度
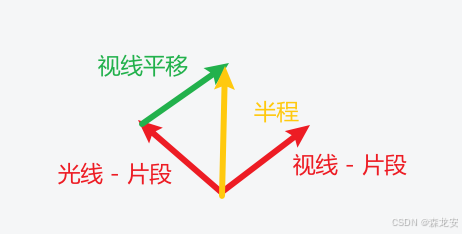
法线n,观测方向v,光照方向I,反射光线R,半程向量H(V和I的角平分线)光泽度shininess,自身颜色color
//

两个性质:
能量守恒(决定到达的能量):
- 光的传播过程中,总能量保持不变,反射的能量不能超过入射的能量
- 入射光的能量等于反射光和折射光的总能量
余弦定理(决定接受的能量):I与n夹角越大,物体表面接受的光照总量越小,即点乘结果

漫反射:kd为本身的颜色 * 到达能量 * 吸收的比率
//
R和V夹角越近,颜色强度越大,等价于,H和n的夹角

半程向量 = I + V / || I + V || 归一化(仅方向)
指数p:比如没有指数,在比如45的角度下看平面,会看到比较大的高光区域,因为cos值仍比较大,因为对于很多点都有比较亮的高光

镜面:ks为高光的颜色(通常为白色) * 到达能量 * 看到高光的比率,指数p(通常为100~200)
插值
插值:已知顶点之间估算中间数据值的过程,插值的目的是通过已知顶点的属性,计算出多边形内部任意位置的属性值,从而平滑的过渡效果。
插值类型
1·线性插值:它根据片段距离每个顶点的比例来插值数据。
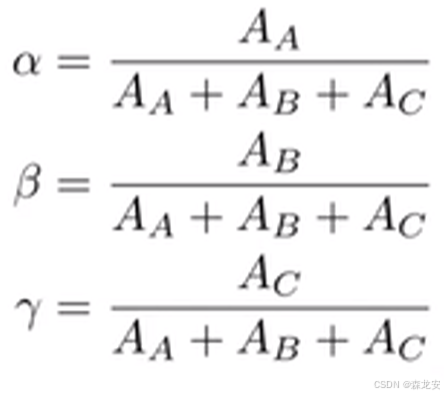
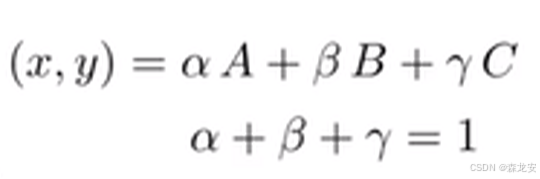
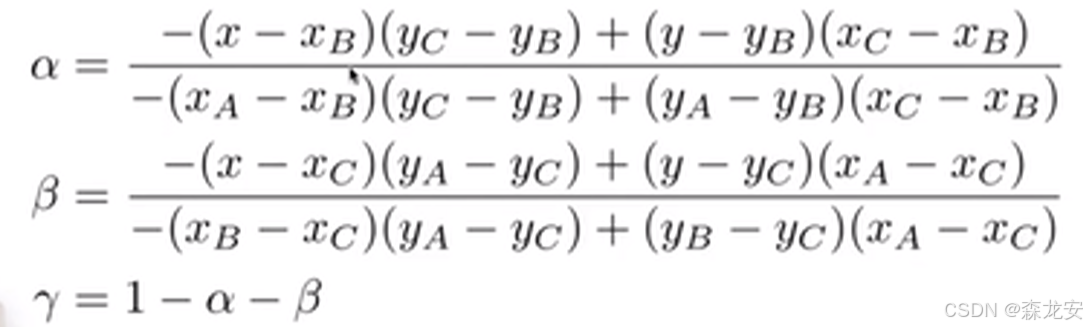
2·重心插值:用于表示一个点 P 在三角形内部的相对位置,对于三角形平面任意一点,都可以表示为3个顶点的线性形式,如果在三角形内,abc的权重都>0 。根据三角形面积求点对应的重心坐标(barycentric coordinates)abc的权重。
三角形重心:重心坐标为1/3,1/3,1/3 ,相加满足和为1的性质
如何计算每个三角形面积?
通过重心坐标可以求出内部的点对于三角形顶点的,颜色,深度,法线,纹理等属性插值结果
透视校正:在3D场景中,由于投影变换的存在,单纯的线性插值可能导致错误的结果。比如深度,在透视投影中,z的变换是非线性的(近大远小),
应该首先获取像素逆变换到3维空间的坐标,在3维空间通过重心插值获取属性,再把值应用到像素上
理解框架中深度z插值:
//计算坐标在三角形的重心坐标
static std::tuple<float, float, float> computeBarycentric2D(float x, float y, const Vector3f* v)
{
float c1 = (x*(v[1].y() - v[2].y()) + (v[2].x() - v[1].x())*y + v[1].x()*v[2].y() - v[2].x()*v[1].y()) /
(v[0].x()*(v[1].y() - v[2].y()) + (v[2].x() - v[1].x())*v[0].y() + v[1].x()*v[2].y() - v[2].x()*v[1].y());
float c2 = (x*(v[2].y() - v[0].y()) + (v[0].x() - v[2].x())*y + v[2].x()*v[0].y() - v[0].x()*v[2].y()) /
(v[1].x()*(v[2].y() - v[0].y()) + (v[0].x() - v[2].x())*v[1].y() + v[2].x()*v[0].y() - v[0].x()*v[2].y());
float c3 = (x*(v[0].y() - v[1].y()) + (v[1].x() - v[0].x())*y + v[0].x()*v[1].y() - v[1].x()*v[0].y()) /
(v[2].x()*(v[0].y() - v[1].y()) + (v[1].x() - v[0].x())*v[2].y() + v[0].x()*v[1].y() - v[1].x()*v[0].y());
return {c1,c2,c3};
}
// 根据重心坐标计算坐标最终的z深度
std::tie(alpha, beta, gamma) = computeBarycentric2D(i+a[k], j+a[k+1], t.v);
//透视校正
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;3种着色方式:

Face Flat平面着色:对每个三角形四边形有相同的法线,法线根据三角形边两个两个插值得到,因此每个三角形内部有完全一致的结果
Vertex Gouraud顶点着色:对每个顶点着色,内部用插值计算颜色,结果近似
Pixel Phong像素着色:着色应用在每个像素上,法线方向在内部插值,有更精确的结果
//
法线插值:
比如某顶点是周围三角形的公有顶点,求这个顶点的法线,就是其他的三角形法线方向的加权平均值
渲染流水线
渲染流水线:
将 3D 场景 转换为 2D 图像的过程
-
渲染流水线(Rendering Pipeline):侧重于 GPU 内部的处理阶段,尤其是渲染的各个阶段如何协作从 3D 数据生成图像。更具技术细节,描述数据如何在 GPU 上流动。
-
渲染管线(Render Pipeline):是一个更宽泛的概念,涵盖了从场景数据组织到图形渲染的全流程,包括 CPU 端的场景管理、资源调度、API 调用以及 GPU 的流水线处理。
-
图形管线(Graphics Pipeline):主要描述图形 API(如 OpenGL、Vulkan 等)如何控制 GPU 渲染阶段。更注重图形 API 的设计和其对 GPU 的控制流程。
Shader:
是渲染流水线中可编程的部分,
和作业框架不同,使用图形api时,对于顶点或片段的操作应写在shader中,对于opengl来说需要用glsl语言,directx需要hlsl语言……
当bind绑定shader并调用drawcall时,会自动(非for循环)对每个顶点计算位置和片段/像素计算颜色,运行绑定的着色器
-
顶点着色器(Vertex Shader):处理每个顶点的输入,计算坐标变换、法线变换、纹理坐标等。
-
片段着色器(Fragment Shader):处理光栅化后每个像素(片段)的颜色、纹理映射、光照计算等。
-
几何着色器(Geometry Shader):可选阶段,用于在顶点之后、光栅化之前对几何体进行修改。
-
计算着色器(Compute Shader):独立于渲染流水线,可以用于并行处理复杂计算任务,比如物理模拟、流体模拟等。
GPU:
执行渲染流水线,并以极高的效率并行执行流水线中的任务。
纹理映射
基本概念
纹理:一块有分辨率的缓冲(内存),可以保存到立方体或球体(展开有问题)等,它不仅可以保存颜色信息,也可以保存其他数据
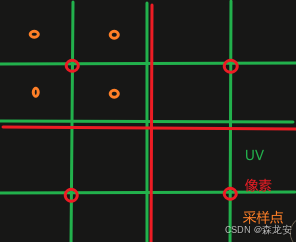
纹理坐标UV:每个顶点指定对应的纹理uv坐标,从而获取uv对应的纹理颜色,作为着色模型kd系数
纹理插值:对于内部的点,也需要找到对应的uv坐标
因为纹理有分辨率,每个像素又叫做纹素
//
纹理走样问题: 无论纹理分辨率过高(远处(Moire))还是过低都会产生走样
分辨率过低产生锯齿
分辨率过高,产生波纹状或闪烁
分辨率过低
纹理插值方式(点查询):
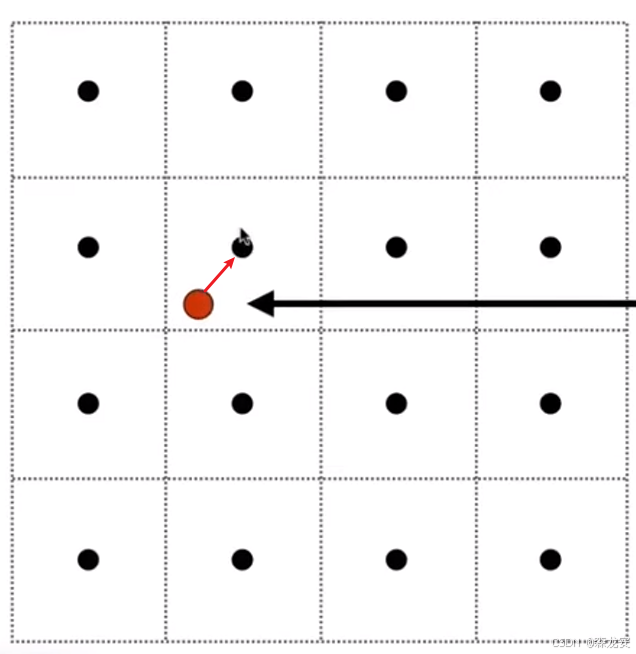
nearest临近插值:如果纹理分辨率不足,很多像素(透视校正结果)投影到非整数的uv坐标,取整后对应同一个纹素,就会形成明显的锯齿状
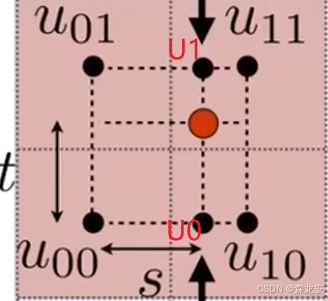
bilinear双线性插值:取周围4个坐标,水平竖直方插值
bilinear三线性插值:取周围16个坐标,水平竖直方向插值
分辨率过高
思路就是查询像素对应的uv纹理范围,求均值,那么如何得知对应的范围以及均值呢?
解决方式:
增加采样点(比如一个像素512个采样点,但是太消耗性能)求平均值
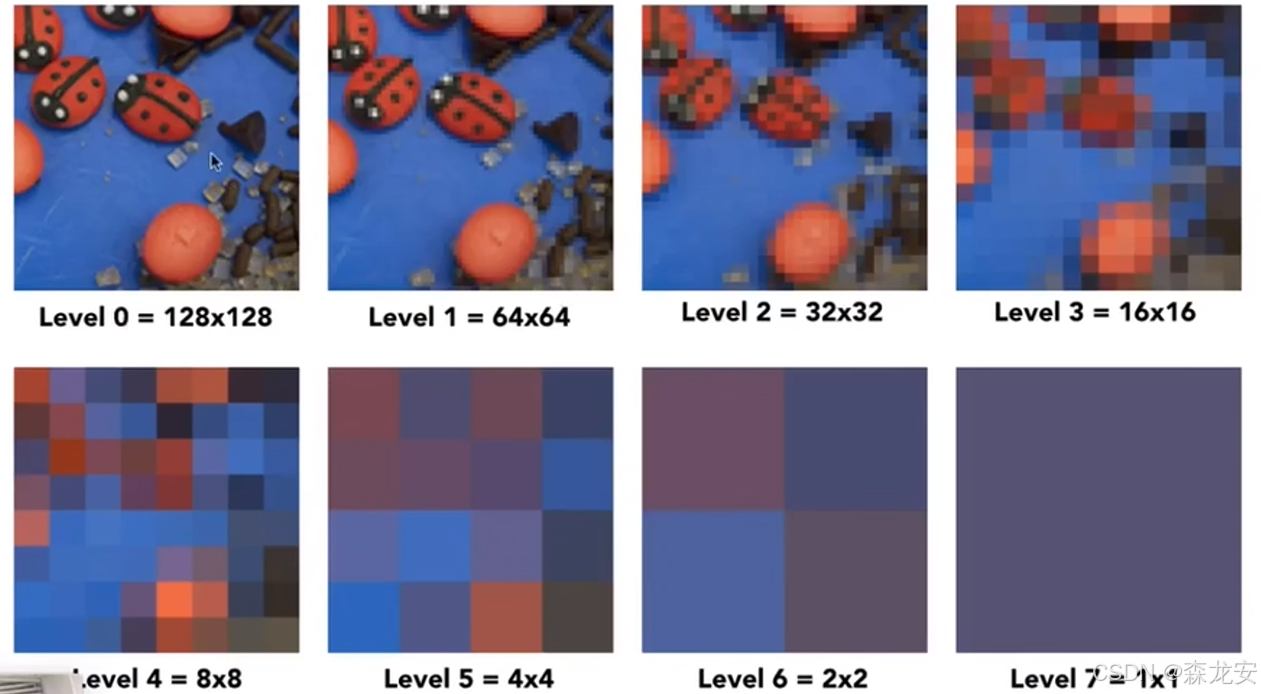
Mipmap(多级渐远纹理)(仅能查询正方形):近似的较快的正方形查询算法,并且解决透视投影uv范围不同
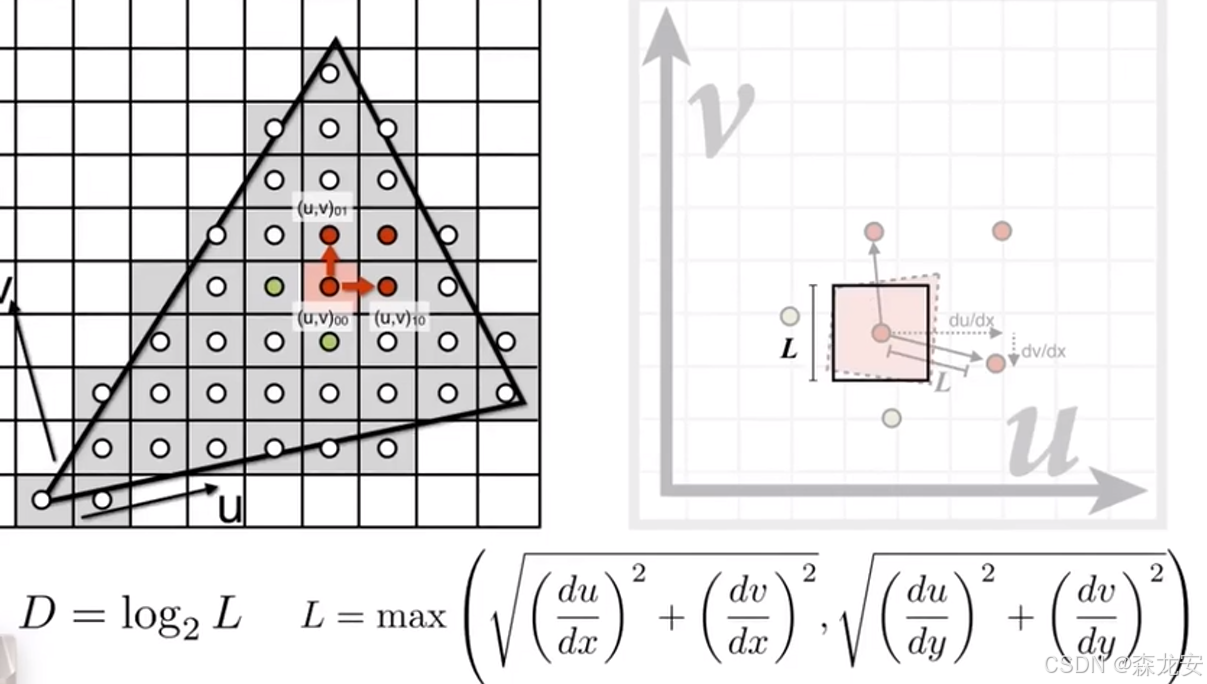
临近点:首先查询像素本身和邻居对应的uv坐标,通过距离近似的方式,采样uv正方形,
如何查询?正方形在不同级别对应一个或多个或小于一个的纹素,查找对应一个纹素的mipmap,从而一次查询结果
优化:
但是层级有限,会出现断层,需要通过三线性插值解决突然断层问题,在两个层分别双线性插值,在对两个层线性插值
问题:
但是三线性插值存在一些问题,并不能针对所有uv范围的形状
Ripmap 各项异性过滤(矩形/正方形),它不必仅查询正方形,用矩形做过度,对于矩形的纹理查询效果较好
EWA过滤:对于纹理中不规律的形状查询
当分辨率一致
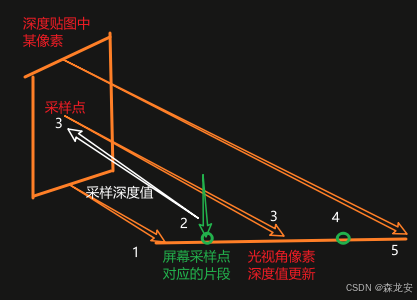
依旧会出现走样问题:
比如渲染阴影时通常深度贴图和屏幕分辨率一致,依旧出现条纹的失真,本质依旧是分辨率问题:虽然都是一定范围区域投影到同一个屏幕像素,但是光的视角和摄像机视角不同,
因此,假设每个像素采样一次(一个采样点在像素中心),光的视角下渲染,像素被更新为采样点逆变换到3d空间对应的深度值,
而摄像机视角可能像素采样点对应的并非和光的那个一致,比如在采样点前方或后方,却从同一深度贴图的像素采样,得到的是不同的结果
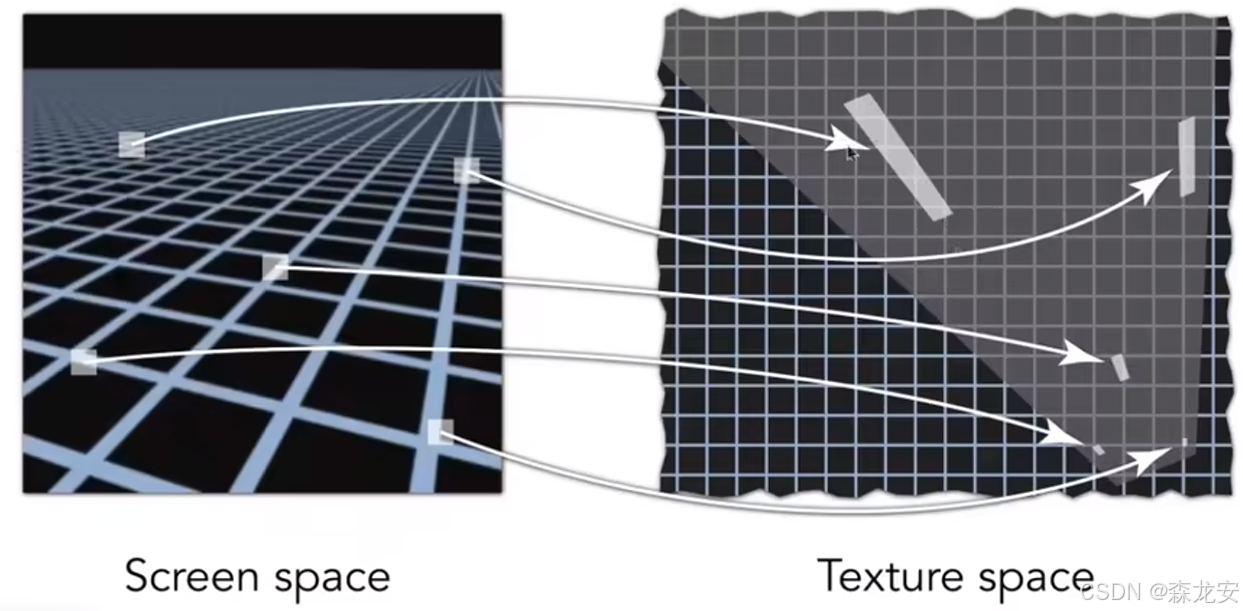
透视的影响
直观每个像素对应的uv范围,近处的对应范围少,远处对应范围多,因此会有较大的偏差,应该范围采样解决走样,相当于求范围的均值
纹理贴图(Texture Mapping)类型
- 漫反射贴图:模拟物体表面颜色,用于表现物体的基本颜色和材质。
- 光照贴图控制反光区域,用于增强物体表面的光泽感和反射效果。
- AO(环境光遮蔽)贴图:通过预计算好的贴图来模拟环境光遮蔽效果,使物体表面的阴影更加真实自然。
- 环境贴图(Environment Map)记录周围环境光线信息并将其应用于物体表面,以模拟物体反射周围环境的效果。
- 凹凸贴图(Bump Mapping):根据定义的高度和临近的高度差计算切线,从而重新计算法线方向,
- 位移/视差贴图(Displacement / Parallax Mapping):存储深度/高度,根据深度值计算位移或偏移,从而模拟出更加真实的凹凸效果。
- 法线贴图(Normal Mapping):存储法线方向,根据视角计算计算更精确的效果
Bump Mapping:
如何求凹凸贴图法线方向:切线(根据高度差)逆时针旋转90度(根据旋转公式)
导数(Derivative)是微积分中的一个核心概念,描述了函数在某一点切线斜率,在这个凹凸贴图中,可以叫切线也可以叫导数
根据坐标差计算切线:已知曲线上的一个点P(x1,y1),选择一个非常接近P的点Q(x2,y2),其中x2是x1的一个微小增量,即x2=x1+Δx
两点式斜率公式(近似值):斜率k(浮点值)=(y2−y1 )/ (x2−x1)
但上述是相对一个点计算2维的切线,但是纹理需要根据两个方向(UV)求出切线,
大体原理就是U方向的斜率作为x,V方向的斜率作为y,z设为常量1,对于的法线,分量xy旋转90度后的归一化结果
切线空间TBN:
以法线作为右手坐标系正z方向的局部空间,通过乘以m矩阵变换到世界空间,从而将纹理空间定义的贴图数据变换到世界空间,否则直接采样不正确的结果
……首先根据公式计算tangent,bitangent,normal
//然后变换到世界空间
vec3 T = normalize(vec3(model * vec4(tangent, 0.0)));
vec3 B = normalize(vec3(model * vec4(bitangent, 0.0)));
vec3 N = normalize(vec3(model * vec4(normal, 0.0)));
mat3 TBN = mat3(T, B, N)
//再将采样的法线变换到世界空间
normal = texture(normalMap, fs_in.TexCoords).rgb;
normal = normalize(normal * 2.0 - 1.0);
normal = normalize(fs_in.TBN * normal);
Displacement Mapping
和位移贴图不同,虽然都是模拟凹凸感,但并非根据高度差重新计算法线方向,而是根据高度计算新的纹理采样方向
总体来说视差贴图效果更好,但是需要模型足够精细
动态曲面细分:如何确定模型网格数量分界线,以在性能和效果做平衡
3维纹理:通常和3维噪声配合



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









