







与特征点等主流方法相比,小波矩是计算机视觉中古老的偏方,追溯到1962年。虽很少提及,但该方法的思路比较有意思。
后面以小波矩”从哪里来用到哪里去“为主线描述。数学渣顺便强行解释一波理论,请原谅我这里教材式的引用。~( ̄▽ ̄)~( ̄▽ ̄)~
1. 特征函数 1
(1) 引入
随机变量的特征函数完全定义了它的概率分布 2。
南大的傅渥成老爷对特征函数的引入有如下解释 3:
a. 实际应用中,计算各事件的概率分布函数困难,矩特征容易测量;
b. 计算矩时,分布函数要通过积分,而特征函数仅仅采用微分;各阶矩的形式更加统一;
c. 傅里叶空间与时域空间可以一一对应。
(2) 定义
假设概率空间中有随机变量
X
,其对应的分布函数为
其中 f(x) 为X的概率密度函数。
ψ(t) 是关于X的特征函数,但符号表达上的输入却为t。
(3) 性质
|ψ(t)|≤ψ(0)=1
由 |ψ(t)|=E(cos(tX)+jsin(tX)) 知, |ψ(θ/X)|=|cosθ+jsinθ|<1 ;ψ(−t)=ψ(t)¯¯¯¯¯¯
|ψ(−t)|=E(cos(−tX)+jsin(−tX))=E(cos(tX)−jsin(tX))=ψ(t)¯¯¯¯¯¯ ;假设X的特征函数为 ψ(t) ,那么 Y=aX+b 的特征函数为:
ψaX+b(t)=E(ejt(aX+b))=E(ejt(aX))⋅E(ejtb)=E(ej(at)X))⋅ejtb=ψ(at)⋅ejtb;X 的特征函数半正定。
波赫纳-辛钦定理: 若函数
ψ(t)(t∈R) 连续半正定,且 ψ(0)=1 ,则 ψ(t) 一定为特征函数。
(4) 特征函数与矩
- 存在
X
的n阶矩,则
X 的特征函数的 k 阶导数ψ(k)(t) 存在,且
E(Xk)=j−kψ(k)(0),k≤n
上式表达了X的k阶矩与其特征函数的k阶导数之间的关系。
(5) 反演公式和唯一性定理
对于分布函数
F(x)
上的任意连续点
x1
和
x2(x1<x2)
,有
上述公式说明了分布函数与特征函数间的关系,可以推出唯一性定理。
唯一性定理: 分布函数恒等的充分必要条件是对应的特征函数恒等。
如果特征函数绝对可积,则由分布函数与密度函数的关系可推出:
X为离散整数变量时同理。假设概率函数
F(X=k)=fk,k=...−3,−2,−1,0,1,2,3...
,对应的特征函数为
ψ(t)=E(ejtk)=∑∞k=−∞pkejtk
,有:
直观上看,特征函数
|ψ(t)|≤1
,所以
|fk|≤12π∫∞−∞|e−jtk|dt
,而
|e−jtk|≤1
,有
|fk|≤12π∫∞−∞dt
,这里把
∞
改为
π
依然成立。所以有:
(6) 多维
一维随机变量的相关性质可以推广到多维。当多维随机变量
Xi,i=1,2,...,n
相互独立,则其特征函数为:
2. 基于矩的矩生成函数和特征函数 4
(1) 矩
2维随机变量
(x,y)
的密度函数
f(x,y)
的
(p+q)
阶矩
mpq
的定义为:
由唯一性定理知,不同的分段连续的的密度函数 f(x,y) 恒等的充分必要条件是它们的特征函数 mpq 恒等。
(2) 矩生成函数
矩生成函数
M(u,v)
的定义为:
由指数函数的泰勒展开式
ex=1+x+x22!+...+xkk!+...=∑∞k=0xkk!
得:
(3) 特征函数
2维随机变量 (u,v) 的特征函数 ψ(u,v) 的定义类似于1维:
(4) 中心矩
中心矩
μpq
的定义如下:
假设随机变量 (x,y) 偏移至 (x+α,y+β) ,则带入上式后, x¯ 和 y¯ 变为 x¯−α 和 y¯−β 。
中心矩的平移不变性:如果你已经接受“中心矩与随机变量的均值无关”这一观点。则可以理解“当均值发生变化时,中心矩的值依然不会变”。
Kuiming Hu提出的不变矩的几个几何矩不变量不再介绍,因为小波矩仅仅用到矩的特点。这里提及是因为他更加明确地描述了图像的特征函数和矩的关系。
3. 小波矩 6
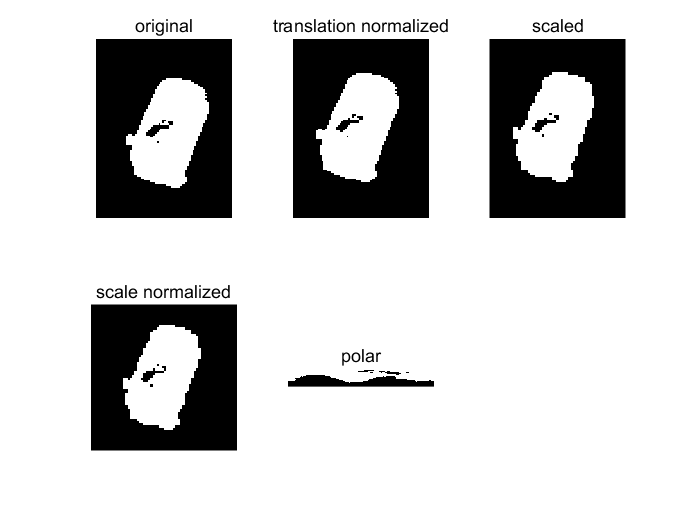
(1) 平移和尺度归一化
直接平移和缩放实现平移和尺度不变性。
f(x,y)
为笛卡尔平面坐标系中的坐标(x,y)的二值图像值(换句话说,
f(x,y)∈{0,1}
)。与极坐标系中的坐标
(r,θ)
的关系如下:
计算目标形状的中心:
计算尺度因子:
其中, m00 为二值图像的“质量” 5, SIZE 为图像的指定大小。 图像的大小从 m00 到 SIZE 。
平移缩放后的坐标值为:
若目标区域无噪声,则图像的面积等于目标的面积 m00 。
这就是个问题了~该方法有效的前提为目标物体的完整抠取。如果图像中有其它的噪声目标,矩计算对目标形状归一化失去意义。
(2) 旋转表达
极坐标系中的随机变量
(r,θ)
的
(p+q)
阶矩为:
其中, gp(r) 为 r 的函数。
逆时针旋转
旋转不变性得证。
旋转矩简化为:
其中, sq(r) 为关于 r 的1维变量(
- 当
gp(r)=rp 时,可获得Hu矩和Li矩;- 当 gp(r)=∑p−|q|2s=0(−1)s⋅(p−s)!s!(p+|q|2−s)!(p−|q|2−s)! 时,可获得Zernike矩;
- 当 gp(r)=4an+12π(n+1)√σwcos(2πf0(2r−1))exp(−(2r−1)22σ2w(n+1)) 时,可获得基于近似3阶B样条小波的矩。
B样条小波逐点渐进收敛为Gabor函数。3阶B样条小波的近似误差小于3% 5。
(3) 小波矩特征
沈分析Hu矩,Li矩和Zernike矩在全局图像空间中计算。假设2个相似物体矩的模长以及噪声分别为 ||mpq|| , ||m′pq|| 和 δpq ,有:
||mpq||=||m′pq||+Δpq+δpq
全局空间中 Δpq<δpq ,即 图像噪声淹没了物体的相似性特征。而小波矩适合提取局部可分特征。
视 gp(r) 为小波基函数,且函数族为:
ψ(c,d)(x)=1c√gp(x−dc)
其中, c 为膨胀参数,d 为偏移参数。图像大小始终在径向域{ r≤1 }中,构造 r=x−dc=x−0.5n∗0.5m0.5m=x0.5m−0.5n ,所以有:
ψ(c,d)(x)=2m2gp(2mx−0.5n)
由于 r=2mx−0.5n≤2mx−0.5∗2m+1=2m(x−1) ,令 r≤1 ,得 x≤12m+1 。所以如果要采样 r≤1 的完整区域,存在一部分 x∈(1,12m+1] 造成过采样。与图像恢复相比,目标分类并不需要物体的完整小波特征。特征选择后去掉冗余和敏感的噪声。
以B样条小波函数为基函数的小波函数族的特征在分类时定义为其L2-模。因此得到完备的小波矩特征:
||mmnq||=||∫10(∫2π0ejqθf(r,θ)dθ)⋅2m2gp⎛⎝∑m=03∑n=02(m+1)(2mx−0.5n)⎞⎠rdr||
径向域{ 0≤r≤1 }上的积分表达了 f(r,θ) 在不同尺度上的特征。(4) 小波矩特征提取
假设目标的二值图像为完整苹果皮摊开的2维平面。削苹果时,刀与苹果皮的当前接触点的二值特征记为 f(r,θ) , r 为刀离苹果垂直轴的半径,
θ 为刀离刚下刀削时水平方向的角度, ψ(c,d)(x) 可以理解为根据环境光照等对接触点特征的影响因子,削出来的苹果皮拉平作为完整的1维小波矩特征。所以,小波矩是削苹果后留下的条状苹果皮。3. 结果
该方法仅要求无噪声的二值图像,所以暂时先采用预处理后的二值图像数据集。
(1) 获取极坐标图像
玩具汽车的归一化图像和极化图像。
(2) 小波函数族
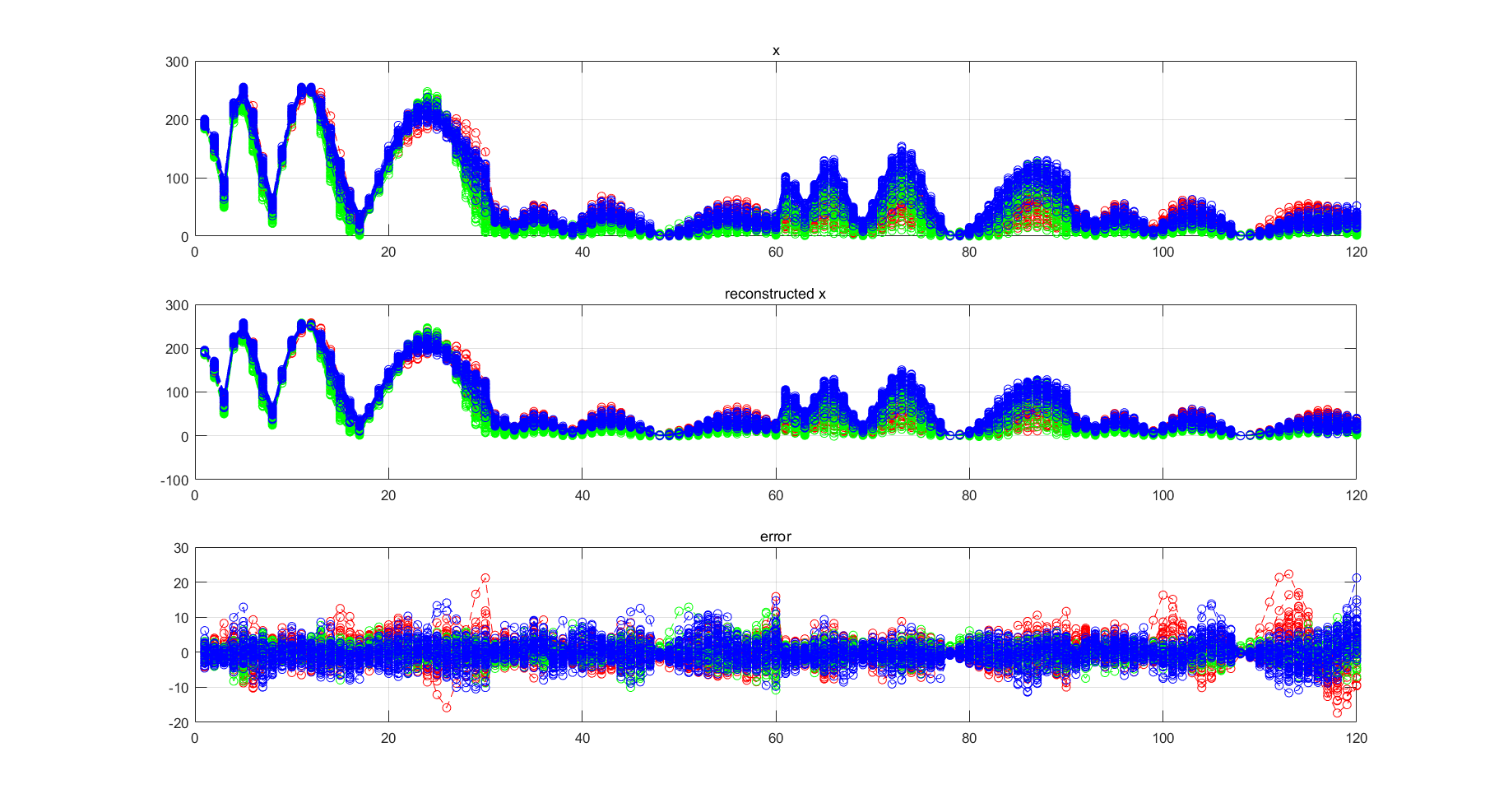
(3) 完整的小波矩特征
红,绿和蓝色分别为3类玩具的小波矩特征。
4. 总结
(1) 优点
二值图像中每个像素点的坐标可以看作图像笛卡尔空间(或极坐标)空间中的2维随机变量。假设二值随机变量的概率定义为该随机变量值为真的概率,那么2维随机变量就有了自己的概率分布。由于特征函数能够更有效地表示概率分布,同时特征函数与矩之间有着明确的关系,所以矩特征可以替换二值图像概率分布的定义。
基于小波特征的矩与其它矩特征相比,在全局特征的噪声淹没目标特征的情况下,更加适合局部特征的提取。(2) 局限
小波矩的基函数固定。即使表现出色,和更贴近目标样本的稀疏编码等方法相比,手动确定基函数直观感觉该方法还是对样本更为冷淡一些。
整个方法的基础是像素点为目标点的概率分布,复杂场景中抽取二值前景图像本身就是个open problem,所以应用场合挺有限。
注:参考的资源和文献的链接位于引用时内容的右侧。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









