






目 录
Abstract 2
目 录 3
一、绪 论 4
多旋翼农用无人机的发展简史 4
多旋翼农用无人机的发展现状与展望 5
二、六旋翼农用无人机的机体与喷施结构设计 7
1、六旋翼农用无人机整体基本构造设计 7
2、六旋翼农用无人机喷施设备的基本构造设计与工作原理 8
3、六旋翼农用无人机的自平衡原理 8
三、六旋翼农用无人机的动力系统与工作原理 10
动力系统基本组成 10
驱动电动机与电子调速器: 11
1、驱动电机参数的确定以及巡航时间的计算 12
1.1 无人机电机的选择 12
1.2 无人机的工作时间 13
1.3 螺旋桨的设计 14
1.4 螺旋升力的计算: 15
2、电调的使用 15
3、PCB电子集合板、陀螺仪、摄像及遥控传感器设备应用 16
四、六旋翼农用无人机的保养与保管 21
参考文献 22
致 谢 23
二、六旋翼农用无人机的机体与喷施结构设计
1、六旋翼农用无人机整体基本构造设计
六旋翼农用无人机主要有三个部分构成,即为:机体部分、控制部分、动力部分。三个部分的功能各不相同,相互作用。机体部分指的是机身骨架,它为其他部分提供固定安装和机械连接;动力部分指的是电池、电动机、液泵、机翼等部分,它为控制部分提供电力,并进行作业;控制部分指的是无人机的控制系统,它为运动部分提供精密准确的控制指令。
其中,六旋翼农用无人机的整体设计如下图:
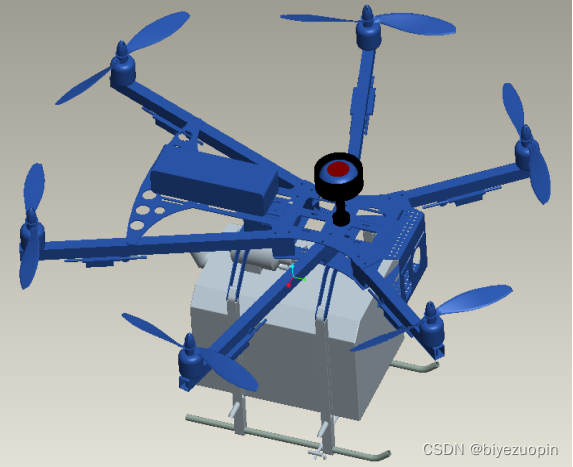
该六旋翼农用无人机的六个螺旋桨位于同一个平面上,通过六根长度不等的轴相连接在机架固定板上。这样做的好处,主要是保证了机架上半部分(除去药箱、活塞泵等下部部件)的重心位于中心的前提下,能够承担更大的负载。重心位于中心的位置将在以下内容重点讲述。
机体上半部分包括有螺旋桨、六个轴、上下固定板、GPS、电池、PCB电路板、电子陀螺仪、六个电机、摄像设备等重要部件及零件,主要完成动力、信息传输、控制、航拍等任务。
机体下半部分包括有药箱、活塞泵、药杆及喷头、底座、支撑架等重要部件,主要完成喷药任务。
2、六旋翼农用无人机喷施设备的基本构造设计与工作原理
六旋翼农用无人机喷施结构如下图(简图),是由药箱、活塞泵、传感器、喷射部件和电子操纵控制装置等组成。
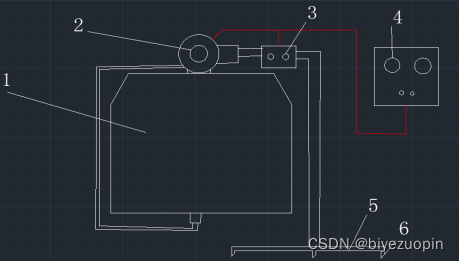
1、药箱;
2、活塞泵;
3、调压设备;
4、电源;
5、喷药杆;
6、喷头。
药箱:用来盛装药液的箱体。箱体是一个圆柱筒,上端靠边缘处设计了加液口(内置过滤网、带有小孔的盖子等),下端安装有压力传感器和泄液出端,并在上中下部位安有密度传感器。当液泵工作时,箱体的药液便可以通过进液管源源不断进入液泵中,同时,压力传感器就将箱体内药液产生的压力数据传输给接收端,便于辨知箱体内药液的剩余量。
活塞泵:用来提供一定压力和流量的液体到喷洒部件中去。它用卡箍固定在药箱顶部,通过电动驱动液泵工作。工作时,通过电子操纵控制装置操纵活门做动筒运动,使出液活门打开或关闭,控制液泵出来的药液通过出液管送到喷洒部件。
调压设备:也即调压控制装置,是通过电子设备操控出液压力。
相关的喷量计算公式:
用Q表示喷洒量,单位为m³/公顷,主要取决于每个喷头的喷量、喷头的数量、喷幅和飞行速度。即为:
Q =
式中 Q为所需喷量;
N为喷头数;
q为喷头排量(m³/s);
B为喷副(m);
为飞行速度(m/s)。
检查喷洒量时,可以把定量的药液放入药箱中,然后以合适的压力定时把它喷出,根据排出箱中的药液量能够确定喷洒量。
3、六旋翼农用无人机的自平衡原理
在六旋翼农用无人飞行机中,虽然其六轴不一样长,但是仍然位于同一圆上,而且其重心仍在中间位置。除此之外,有2个轴上的螺旋桨为主旋翼,2个主旋翼旋转方向相反;外侧4个为副旋翼,相邻2个旋翼旋转方向两两相反,2个顺时针旋转,2个逆时针旋转。其整机升力主要由2个共轴旋翼提供,飞行器的姿态调整由4个副旋翼控制。六旋翼飞行器可以通过调节各电机的转速来改变牵引力的大小,实现飞行姿态与航向的控制,并具自平衡性。
当所有旋翼产生的升力等于无人机自身的重力时,飞行器保持悬停状态。无人机的升降运动有2个主共轴旋翼决定。当2个共轴主旋翼旋的转速共同减小,所有旋翼产生的升力小于飞行器自身的重力时,飞行器下降。当2个共轴主旋翼旋的转速共同增大,所有旋翼产生的升力大于飞行器自身的重力时,飞行器升高。
无人机要偏转航向,需要所有旋翼产生的反扭矩不平衡。六旋翼无人机的偏航由2个共轴主旋翼决定。2个共轴主旋翼旋转方向相反,平衡所有旋翼产生的反扭矩。当2个共轴主旋翼平衡了所有旋翼产生的反扭矩时,无人机无偏航。当顺时针旋转旋翼转速降低,逆时针旋转旋翼转速增大,且2个共轴主旋翼所产生的升力之和保持不变时,无人机顺时针偏航。当逆时针旋转旋翼转速降低,顺时针旋转旋翼转速增大,且2个共轴主旋翼所产生的升力之和保持不变时,无人机逆时针偏航。
无人机水平移动由4个副旋翼决定。由于所有旋翼无法产生水平方向上的牵引力,所以飞行器需要产生倾斜,由升力在水平方向上的分力推动飞行器水平移动。当一侧的2个副旋翼转速增大,产生的升力增大,而另一侧的2个副旋翼转速降低,产生的升力降低时,无人机的姿态产生倾斜,无人机朝姿态降低的一侧水平移动。当转速共同变化发生在前后两侧,无人机产生姿态发生俯仰,并产生前后运动。当转速共同变化发生在左右两侧,无人机产生姿态发生翻滚,并产生左右运动。本文转载自http://www.biyezuopin.vip/onews.asp?id=13809由于无人机任意一个侧面的两个副旋翼的旋转方向都是相反的。因此,同侧副旋翼转速共同增大和降低,不会引起反扭矩的平衡。
综上所述,六旋翼无人机实现了空间6个自由度(分别沿3个坐标轴作平移和旋转运动)的运动。在实际使用情况下,有用的主要运动为沿3个坐标轴作平移运动和绕垂直轴的旋转运动,俯仰运动和翻滚运动为水平运动的诱导运动。





























 1078
1078

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











