







- pointnetgpd 论文
论文链接 - 项目官方代码链接:
原作者pointnetgpd代码链接
原作者中相关的运行教程较少,环境配置说得也不够清楚。 - pointnetgpd复现加注释代码链接:
带中文注释的代码链接
本人主要参考这个项目代码,其中代码加了很多中文注释,对环境的配置解释得相对清楚一些。
分别在anaconda下配置python3与python2.7的环境,python3用来训练模型,python2.7主要用来结合ros发布抓取消息。
其中尤为需要注意python-pcl、vtk、autolab-core包的安装版本,autolab-core在python2和python3下安装版本并不相同,python2下需要安装perception,python3将perception迁移到autolab-core中了。
python-pcl安装参考Ubuntu安装python-pcl
最终配置好的环境如下:
python3的环境(grasp)配置如下:
name: grasp
channels:
- pytorch
- defaults
dependencies:
- _libgcc_mutex=0.1=main
- blas=1.0=mkl
- bzip2=1.0.8=h7b6447c_0
- c-ares=1.18.1=h7f8727e_0
- ca-certificates=2022.4.26=h06a4308_0
- certifi=2021.10.8=py37h06a4308_2
- cudatoolkit=10.2.89=hfd86e86_1
- curl=7.82.0=h7f8727e_0
- cython=0.29.28=py37h295c915_0
- dbus=1.13.18=hb2f20db_0
- double-conversion=3.1.5=he6710b0_1
- eigen=3.3.7=hd09550d_1
- expat=2.4.4=h295c915_0
- ffmpeg=4.2.2=h20bf706_0
- fontconfig=2.13.1=h6c09931_0
- freetype=2.11.0=h70c0345_0
- giflib=5.2.1=h7b6447c_0
- gl2ps=1.4.2=h70c0345_1
- glew=2.1.0=h295c915_3
- glib=2.69.1=h4ff587b_1
- gmp=6.2.1=h2531618_2
- gnutls=3.6.15=he1e5248_0
- gst-plugins-base=1.14.0=h8213a91_2
- gstreamer=1.14.0=h28cd5cc_2
- hdf4=4.2.13=h3ca952b_2
- hdf5=1.10.6=hb1b8bf9_0
- icu=58.2=he6710b0_3
- intel-openmp=2021.4.0=h06a4308_3561
- jpeg=9d=h7f8727e_0
- jsoncpp=1.9.4=hff7bd54_2
- krb5=1.19.2=hac12032_0
- lame=3.100=h7b6447c_0
- lcms2=2.12=h3be6417_0
- ld_impl_linux-64=2.35.1=h7274673_9
- libcurl=7.82.0=h0b77cf5_0
- libedit=3.1.20210910=h7f8727e_0
- libev=4.33=h7f8727e_1
- libffi=3.3=he6710b0_2
- libgcc-ng=9.1.0=hdf63c60_0
- libgfortran-ng=7.5.0=ha8ba4b0_17
- libgfortran4=7.5.0=ha8ba4b0_17
- libglu=9.0.0=hf484d3e_1
- libiconv=1.15=h63c8f33_5
- libidn2=2.3.2=h7f8727e_0
- libnetcdf=4.8.1=h42ceab0_1
- libnghttp2=1.46.0=hce63b2e_0
- libogg=1.3.5=h27cfd23_1
- libopus=1.3.1=h7b6447c_0
- libpng=1.6.37=hbc83047_0
- libssh2=1.10.0=h8f2d780_0
- libstdcxx-ng=9.1.0=hdf63c60_0
- libtasn1=4.16.0=h27cfd23_0
- libtheora=1.1.1=h7f8727e_3
- libtiff=4.2.0=h85742a9_0
- libunistring=0.9.10=h27cfd23_0
- libuuid=1.0.3=h7f8727e_2
- libuv=1.40.0=h7b6447c_0
- libvorbis=1.3.7=h7b6447c_0
- libvpx=1.7.0=h439df22_0
- libwebp=1.2.2=h55f646e_0
- libwebp-base=1.2.2=h7f8727e_0
- libxcb=1.14=h7b6447c_0
- libxml2=2.9.12=h74e7548_1
- libzip=1.5.1=h8d318fa_1004
- loguru=0.5.3=py37h06a4308_3
- lz4-c=1.9.3=h295c915_1
- mkl=2019.4=243
- mkl-service=2.3.0=py37he8ac12f_0
- mkl_fft=1.2.0=py37h23d657b_0
- mkl_random=1.1.0=py37hd6b4f25_0
- ncurses=6.3=h7f8727e_2
- nettle=3.7.3=hbbd107a_1
- openh264=2.1.1=h4ff587b_0
- openssl=1.1.1o=h7f8727e_0
- pcre=8.45=h295c915_0
- pillow=9.0.1=py37h22f2fdc_0
- proj=6.2.1=h05a3930_0
- python=3.7.13=h12debd9_0
- pytorch=1.10.0=py3.7_cuda10.2_cudnn7.6.5_0
- pytorch-mutex=1.0=cuda
- qt=5.9.7=h5867ecd_1
- readline=8.1.2=h7f8727e_1
- six=1.16.0=pyhd3eb1b0_1
- sqlite=3.38.2=hc218d9a_0
- tbb=2021.5.0=hd09550d_0
- tk=8.6.11=h1ccaba5_0
- torchaudio=0.10.0=py37_cu102
- torchvision=0.11.0=py37_cu102
- typing_extensions=4.1.1=pyh06a4308_0
- utfcpp=3.2.1=h06a4308_0
- wheel=0.37.1=pyhd3eb1b0_0
- x264=1!157.20191217=h7b6447c_0
- xz=5.2.5=h7b6447c_0
- zlib=1.2.12=h7f8727e_1
- zstd=1.4.9=haebb681_0
- pip:
- absl-py==1.0.0
- aiohttp==3.8.1
- aiosignal==1.2.0
- apptools==5.1.0
- async-timeout==4.0.2
- asynctest==0.13.0
- attrs==21.4.0
- autolab-core==1.1.1
- backcall==0.2.0
- bitarray==2.5.0
- cached-property==1.5.2
- cachetools==5.0.0
- catkin-pkg==0.4.24
- chardet==4.0.0
- charset-normalizer==2.0.12
- colorlog==6.6.0
- configobj==5.0.6
- cvxopt==1.3.0
- cycler==0.11.0
- decorator==5.1.1
- defusedxml==0.7.1
- dill==0.3.4
- docutils==0.18.1
- envisage==6.0.1
- ffmpeg-python==0.2.0
- filelock==3.6.0
- fonttools==4.32.0
- freetype-py==2.3.0
- frozenlist==1.3.0
- future==0.18.2
- google-auth==2.6.6
- google-auth-oauthlib==0.4.6
- grpcio==1.46.0
- h5py==3.6.0
- idna==3.3
- imageio==2.19.1
- importlib-metadata==4.11.3
- importlib-resources==5.7.1
- ipython==7.33.0
- jedi==0.18.1
- joblib==1.1.0
- jsonschema==4.5.1
- kiwisolver==1.4.2
- llvmlite==0.38.0
- lxml==4.8.0
- markdown==3.3.7
- matplotlib==3.5.1
- matplotlib-inline==0.1.3
- mayavi==4.7.4
- mock==4.0.3
- mpmath==1.2.1
- msgpack==1.0.3
- multidict==6.0.2
- multiprocess==0.70.12.2
- nearpy==1.0.0
- netifaces==0.11.0
- networkx==2.2
- nose==1.3.7
- numba==0.55.1
- numpy==1.21.6
- oauthlib==3.2.0
- omegaconf==1.4.1
- opencv-python==4.5.5.64
- packaging==21.3
- pandas==1.3.5
- parso==0.8.3
- pcl==0.0.0.post1
- pdqhash==0.2.2
- pexpect==4.8.0
- pickleshare==0.7.5
- pip==22.0.4
- plyfile==0.7.4
- prompt-toolkit==3.0.29
- protobuf==3.20.1
- ptyprocess==0.7.0
- pyasn1==0.4.8
- pyasn1-modules==0.2.8
- pycollada==0.7.2
- pyface==7.4.1
- pyglet==1.5.23
- pygments==2.12.0
- pyhull==2015.2.1
- pyopengl==3.1.0
- pyparsing==3.0.8
- pyquaternion==0.9.9
- pyrender==0.1.45
- pyrsistent==0.18.1
- pyserial==3.5
- python-dateutil==2.8.2
- pytorch-lightning==0.7.1
- pytz==2022.1
- pywavelets==1.3.0
- pyyaml==6.0
- requests==2.27.1
- requests-oauthlib==1.3.1
- rospkg==1.4.0
- rsa==4.8
- rtree==1.0.0
- ruamel-yaml==0.17.21
- ruamel-yaml-clib==0.2.6
- scikit-image==0.19.2
- scikit-learn==1.0.2
- scipy==1.1.0
- setproctitle==1.2.3
- setuptools==59.5.0
- shapely==1.8.2
- sklearn==0.0
- svg-path==6.0
- sympy==1.10.1
- tensorboard==2.9.0
- tensorboard-data-server==0.6.1
- tensorboard-plugin-wit==1.8.1
- tensorboardx==1.6
- threadpoolctl==3.1.0
- tifffile==2021.11.2
- torch-tb-profiler==0.4.0
- tqdm==4.64.0
- traitlets==5.1.1
- traits==6.3.2
- traitsui==7.3.1
- trimesh==3.12.0
- urllib3==1.26.9
- validators==0.19.0
- visualization==1.0.0
- vtk==8.1.2
- wcwidth==0.2.5
- werkzeug==2.1.2
- wslink==1.6.4
- xxhash==3.0.0
- yarl==1.7.2
- zipp==3.8.0
prefix: /home/gjw/anaconda3/envs/grasp
python2的环境(py27)配置如下:
name: py27
channels:
- pytorch
- defaults
dependencies:
- _libgcc_mutex=0.1=main
- _openmp_mutex=5.1=1_gnu
- apptools=5.1.0=pyhd3eb1b0_0
- backports=1.1=pyhd3eb1b0_0
- backports.functools_lru_cache=1.6.4=pyhd3eb1b0_0
- backports_abc=0.5=py_1
- blas=1.0=mkl
- bzip2=1.0.8=h7b6447c_0
- c-ares=1.18.1=h7f8727e_0
- ca-certificates=2022.4.26=h06a4308_0
- certifi=2020.6.20=pyhd3eb1b0_3
- cffi=1.14.0=py27he30daa8_1
- cloudpickle=1.2.2=py_0
- configobj=5.0.6=py27_1
- cuda100=1.0=0
- curl=7.82.0=h7f8727e_0
- cvxopt=1.2.0=py27hfa32c7d_0
- cycler=0.10.0=py27_0
- cytoolz=0.10.1=py27h7b6447c_0
- dask-core=1.2.2=py_0
- dbus=1.13.18=hb2f20db_0
- decorator=5.1.0=pyhd3eb1b0_0
- enum34=1.1.6=py27_1
- envisage=5.0.0=pyhd3eb1b0_0
- expat=2.4.4=h295c915_0
- fontconfig=2.13.1=h6c09931_0
- freetype=2.11.0=h70c0345_0
- funcsigs=1.0.2=py27_0
- functools32=3.2.3.2=py27_1
- future=0.18.2=py27_0
- futures=3.3.0=py27_0
- geos=3.8.0=he6710b0_0
- glib=2.69.1=h4ff587b_1
- glpk=4.65=h3ceedfd_2
- gmp=6.2.1=h2531618_2
- gsl=2.4=h14c3975_4
- gst-plugins-base=1.14.0=h8213a91_2
- gstreamer=1.14.0=h28cd5cc_2
- h5py=2.9.0=py27h7918eee_0
- hdf4=4.2.13=h3ca952b_2
- hdf5=1.10.4=hb1b8bf9_0
- icu=58.2=he6710b0_3
- imageio=2.6.1=py27_0
- intel-openmp=2022.0.1=h06a4308_3633
- jpeg=9e=h7f8727e_0
- jsoncpp=1.9.4=hff7bd54_2
- kiwisolver=1.1.0=py27he6710b0_0
- krb5=1.19.2=hac12032_0
- libcurl=7.82.0=h0b77cf5_0
- libedit=3.1.20210910=h7f8727e_0
- libev=4.33=h7f8727e_1
- libffi=3.3=he6710b0_2
- libgcc-ng=11.2.0=h1234567_0
- libgfortran-ng=7.5.0=ha8ba4b0_17
- libgfortran4=7.5.0=ha8ba4b0_17
- libgomp=11.2.0=h1234567_0
- libnetcdf=4.6.1=h11d0813_2
- libnghttp2=1.46.0=hce63b2e_0
- libogg=1.3.5=h27cfd23_1
- libpng=1.6.37=hbc83047_0
- libssh2=1.10.0=h8f2d780_0
- libstdcxx-ng=11.2.0=h1234567_0
- libtheora=1.1.1=h7f8727e_3
- libtiff=4.1.0=h2733197_0
- libuuid=1.0.3=h7f8727e_2
- libvorbis=1.3.7=h7b6447c_0
- libxcb=1.15=h7f8727e_0
- libxml2=2.9.12=h74e7548_2
- linecache2=1.0.0=py_1
- lz4-c=1.8.1.2=h14c3975_0
- mayavi=4.6.2=py27hcf37d21_4
- metis=5.1.0=hf484d3e_4
- mkl=2020.2=256
- mkl-service=2.3.0=py27he904b0f_0
- mkl_fft=1.0.15=py27ha843d7b_0
- mkl_random=1.1.0=py27hd6b4f25_0
- ncurses=6.3=h7f8727e_2
- networkx=2.2=py27_1
- ninja=1.10.2=h06a4308_5
- ninja-base=1.10.2=hd09550d_5
- olefile=0.46=py27_0
- openssl=1.1.1o=h7f8727e_0
- pandas=0.24.2=py27he6710b0_0
- pcre=8.45=h295c915_0
- pip=19.3.1=py27_0
- pycparser=2.20=py_2
- pyface=6.1.2=py27_0
- pygments=2.5.2=py_0
- pyparsing=2.4.7=pyhd3eb1b0_0
- pyqt=5.9.2=py27h05f1152_2
- python=2.7.18=ha1903f6_2
- python-dateutil=2.8.2=pyhd3eb1b0_0
- pytorch=1.0.0=py2.7_cuda10.0.130_cudnn7.4.1_1
- pytz=2021.3=pyhd3eb1b0_0
- pywavelets=1.0.3=py27hdd07704_1
- qt=5.9.7=h5867ecd_1
- readline=8.1.2=h7f8727e_1
- scikit-image=0.14.2=py27he6710b0_0
- scikit-learn=0.20.3=py27hd81dba3_0
- scipy=1.2.1=py27h7c811a0_0
- setuptools=44.0.0=py27_0
- shapely=1.6.4=py27hc5e8c75_0
- singledispatch=3.7.0=pyhd3eb1b0_1001
- sip=4.19.8=py27hf484d3e_0
- six=1.16.0=pyhd3eb1b0_1
- sqlite=3.38.3=hc218d9a_0
- subprocess32=3.5.4=py27h7b6447c_0
- suitesparse=5.2.0=h9e4a6bb_0
- tbb=2021.5.0=hd09550d_0
- tk=8.6.11=h1ccaba5_1
- toolz=0.10.0=pyhd3eb1b0_0
- tornado=5.1.1=py27h7b6447c_0
- traceback2=1.4.0=py27_0
- traits=5.2.0=py27h7b6447c_0
- traitsui=7.1.1=pyhd3eb1b0_0
- unittest2=1.1.0=py27_0
- vtk=8.2.0=py27haa4764d_200
- wheel=0.37.1=pyhd3eb1b0_0
- xz=5.2.5=h7f8727e_1
- yaml=0.2.5=h7b6447c_0
- zlib=1.2.12=h7f8727e_2
- zstd=1.3.7=h0b5b093_0
- pip:
- autolab-core==0.0.4
- autolab-perception==0.0.3
- backports-shutil-get-terminal-size==1.0.0
- catkin-pkg==0.5.0
- colorlog==4.0.2
- docutils==0.18.1
- easydict==1.9
- ipython==5.5.0
- ipython-genutils==0.2.0
- keras==2.9.0
- llvmlite==0.31.0
- matplotlib==2.2.0
- nose==1.3.7
- numba==0.31.0
- numpy==1.16.1
- pathlib2==2.3.7.post1
- pexpect==4.8.0
- pickleshare==0.7.5
- pillow==6.2.2
- progressbar2==3.55.0
- prompt-toolkit==1.0.18
- ptyprocess==0.7.0
- pyassimp==4.1.3
- pyopengl==3.1.6
- pyserial==3.5
- python-pcl==0.3.0rc1
- python-utils==2.7.1
- pyyaml==5.4.1
- rospkg==1.4.0
- scandir==1.10.0
- scikit-video==1.1.11
- simplegeneric==0.8.1
- sklearn==0.0
- torch==1.4.0
- torchvision==0.5.0
- tqdm==4.19.9
- traitlets==4.3.3
- typing==3.10.0.0
- wcwidth==0.2.5
prefix: /home/gjw/anaconda3/envs/py27
最终运行程序如下:
1、启动realsense相机,发布点云消息。
roslaunch realsense2_camera demo_pointcloud.launch
2、运行去除桌面点云程序
roslaunch point_cloud_process get_table_top_points.launch
3、python2虚拟环境中运行抓取生成程序
python kinect2grasp.py --model_type 500
好的抓取
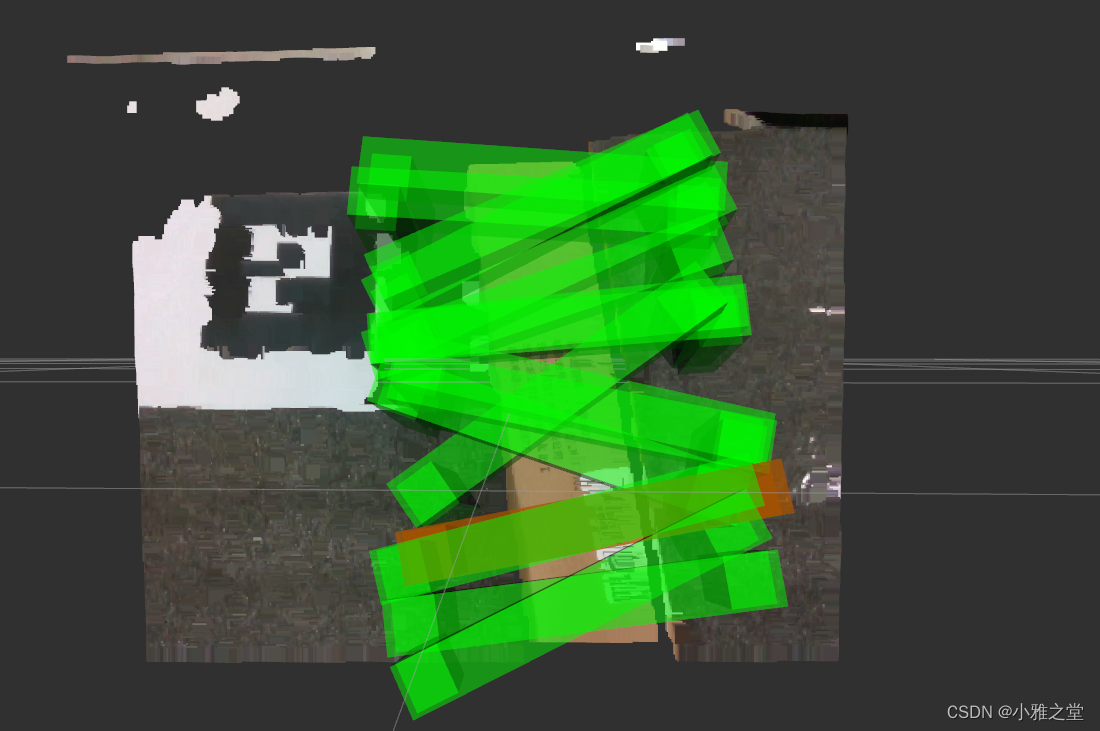
得分最高的抓取
















 554
554











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









