






直流有刷电机转速电流双闭环控制。
双环PID直流有刷电机转速控制Simulink仿真模型,模型全是原创搭建,电机模型使用simulink模块simscope自带的DC model,控制器采用了转速,电流双闭环pwm波控制。
图片中分别是:
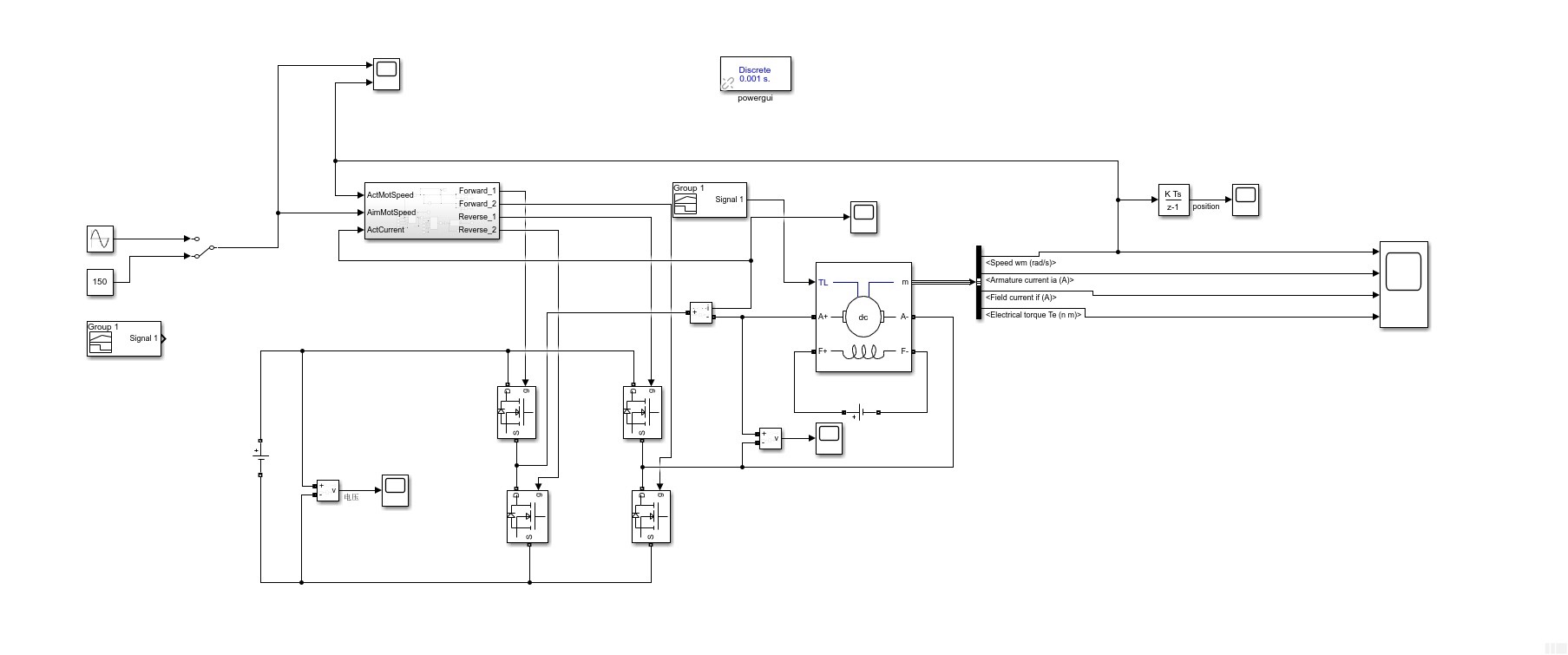
1. 电机仿真模型
2/3.电机在阶跃情况下和正弦情况下的转速跟踪情况。
4. 电机负载变化图
5/6. 电机在阶跃情况和正弦情况下电机的电流以及扭矩的响应曲线。
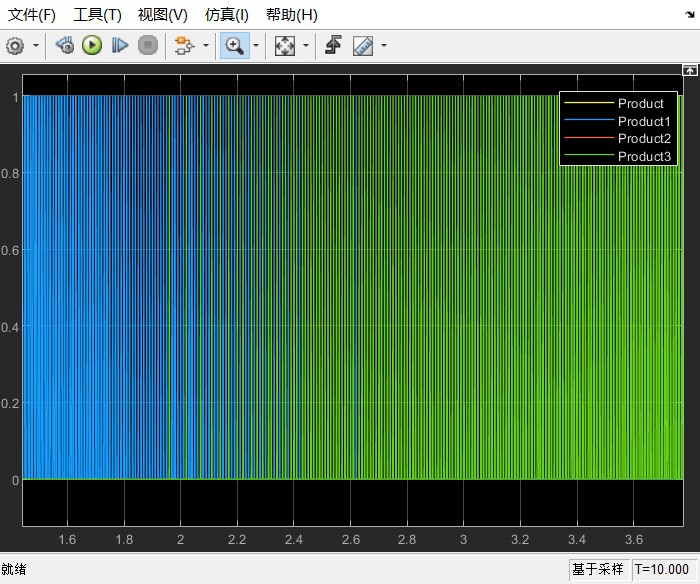
7/8. 分别是电机在正弦情况下的PWM波输出。
模型+说明文档
ID:3589697143476651
醉里挑灯看客






【原创】直流有刷电机转速电流双闭环控制
在现代工业自动化领域中,直流有刷电机广泛应用于各种设备和系统中,其高效、可靠的特性使其成为许多自动化控制系统的核心组成部分。为了实现对直流有刷电机的精确控制,本文提出了一种双闭环控制策略,采用PID控制器,结合转速和电流双闭环pwm波控制。本文通过Simulink仿真模型进行了验证,并展示了仿真结果。
- 电机仿真模型
我们首先搭建了一套全新的直流有刷电机仿真模型,该模型基于Simulink平台,并使用了simscope自带的DC model模块。该模型考虑了电机的电气特性以及机械特性,能够较为准确地模拟电机的运行状态。
- 电机在阶跃情况下的转速跟踪情况
通过对模型进行阶跃输入信号的作用,我们得到了电机在阶跃情况下的转速跟踪情况。仿真结果显示,双闭环控制策略能够有效地使电机的转速快速跟踪目标值,并且具有较小的超调和稳定的过渡过程。
- 电机在正弦情况下的转速跟踪情况
为了更全面地评估控制策略的性能,我们进一步对电机施加正弦输入信号,并观察电机的转速跟踪情况。仿真结果表明,双闭环控制策略能够良好地跟踪正弦输入信号,并且转速的波动范围较小,保持了较高的稳定性。
- 电机负载变化图
为了研究电机在负载变化时的动态响应特性,我们对电机施加不同的负载,并观察其转速的变化情况。仿真结果显示,双闭环控制策略能够有效地抑制负载变化对电机转速的影响,使得电机的转速能够快速恢复到目标值。
- 电机在阶跃情况下的电流和扭矩响应曲线
除了转速的跟踪性能,我们还对电机的电流和扭矩进行了分析。通过对电机施加阶跃输入信号,我们得到了电流和扭矩的响应曲线。仿真结果表明,双闭环控制策略能够使电机的电流和扭矩快速稳定地达到目标值,并且具有较小的超调和稳定的过渡过程。
- 电机在正弦情况下的电流和扭矩响应曲线
为了更全面地评估控制策略的性能,我们同样对电机施加正弦输入信号,并观察电流和扭矩的响应曲线。仿真结果显示,双闭环控制策略能够较好地跟踪正弦输入信号,电流和扭矩的响应具有较小的波动范围和较高的稳定性。
- 电机在正弦情况下的PWM波输出
最后,我们对电机在正弦情况下的PWM波输出进行了展示。通过模拟输出波形,我们可以清晰地观察到PWM信号的变化规律,验证了双闭环控制策略的有效性和稳定性。
总结:
本文基于Simulink平台,通过原创搭建的双环PID直流有刷电机转速控制Simulink仿真模型,验证了双闭环控制策略的有效性和稳定性。通过电机转速和电流的仿真结果,我们可以得出结论:双闭环控制策略能够实现对直流有刷电机的精确控制,具有良好的跟踪性能和稳定性。该控制策略可以广泛应用于各种自动化控制系统中,提高系统的性能和可靠性。
【模型售卖规则】
我们提供了两种模型售卖规则,请根据需求选择合适的套餐:
-
模型+说明文档:39元
包含原创的直流有刷电机转速电流双闭环控制Simulink仿真模型和相应的说明文档。 -
模型+说明文档+10天人工:89元
在模型和说明文档的基础上,额外提供10天的人工支持。如需人工支持,请在付款前联系我们修改价格。
【注意事项】
我们的模型和文档均为原创,能够保证其真实性和有效性。请注意,该产品为虚拟产品,一经售出不退不换。感谢您的支持!
通过以上的叙述,我们详细介绍了使用双闭环控制策略实现直流有刷电机转速和电流的精确控制。仿真结果表明,该控制策略具有良好的跟踪性能和稳定性,适用于各种自动化控制系统。我们提供的Simulink仿真模型和说明文档,可以帮助读者更好地理解和应用该控制策略。希望本文对广大工程师和技术人员在直流有刷电机控制方面提供了一定的参考和帮助。感谢阅读!
以上相关代码,程序地址:http://wekup.cn/697143476651.html















 2232
2232











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









