







源代码中采用的是VLP16激光雷达,它发布的数据在environment里面进行了处理
目标:把16线雷达截取出来一部分,压缩成2维,再z轴上复制堆叠成伪3维
一.接口断裂处:
1.tare_planner_node订阅的"/registered_scan"在yaml里暂时替换成别的=>"/pcl_16to2D_scan"(这个是最后面数据处理完毕后发布的话题)
2.注释掉tare当中不必要的话题订阅(在sensor_coverage_planner_ground.cpp)
// exploration_start_sub_ =
// nh.subscribe(pp_.sub_start_exploration_topic_, 5, &SensorCoveragePlanner3D::ExplorationStartCallback, this); //这个订阅未被使用
registered_scan_sub_ =
nh.subscribe(pp_.sub_registered_scan_topic_, 5, &SensorCoveragePlanner3D::RegisteredScanCallback, this);//******三D相机********/registered_scan
//EXPL 1.每帧执行pd_.planning_env_的一个操作 => :上传一次机器人位置和pd_.registered_cloud_->cloud_ 2. 每5帧上传kepose ==>> 当前机器人位置"keypose_.pose.pose.position;pd_.keypose_.pose.covariance;pd_.cur_keypose_node_ind_" 和 "pd_.keypose_cloud_->cloud_",
// terrain_map_sub_ = nh.subscribe(pp_.sub_terrain_map_topic_, 5, &SensorCoveragePlanner3D::TerrainMapCallback, this);//局部地势/terrain_map
// //EXPL 1.将接收到的点,intensity达到阈值的都赋值给pd_.terrain_collision_cloud_->cloud_->points (只有这件事情) (这个是局部地势)
// terrain_map_ext_sub_ =
// nh.subscribe(pp_.sub_terrain_map_ext_topic_, 5, &SensorCoveragePlanner3D::TerrainMapExtCallback, this);//更大的地势/terrain_map_ext
// //EXPL 1.将接收到的点,intensity达到阈值的都赋值给pd_.terrain_ext_collision_cloud_ (只有这件事情) (这个是较为全局的地势)
state_estimation_sub_ =
nh.subscribe(pp_.sub_state_estimation_topic_, 5, &SensorCoveragePlanner3D::StateEstimationCallback, this);//位置估计/state_estimation_at_scan
//EXPL 1.跟机器人的位置有关,将位置信息赋值给pd_.initial_position_,(只初始化一次) 2.每次更新yaw(翻译是偏离航线) 3.每次更新机器人位置
//MYTODO 地势的都是在 SensorCoveragePlanner3D::UpdateViewPoints() 这个函数里使用;;如果加入2D想要放弃地势变化的话看看怎么改能让这个函数正常工作
// coverage_boundary_sub_ = //这3个订阅未被使用
// nh.subscribe(pp_.sub_coverage_boundary_topic_, 1, &SensorCoveragePlanner3D::CoverageBoundaryCallback, this);
// viewpoint_boundary_sub_ =
// nh.subscribe(pp_.sub_viewpoint_boundary_topic_, 1, &SensorCoveragePlanner3D::ViewPointBoundaryCallback, this);
// nogo_boundary_sub_ =
// nh.subscribe(pp_.sub_nogo_boundary_topic_, 1, &SensorCoveragePlanner3D::NogoBoundaryCallback, this);3.把kCheckTerrainCollision在yaml里默认改为false(取消地势分析)
二.承接/registered_scan重新发布,重接伤口
完整代码
#include <ros/ros.h>
#include <iostream>
#include <pcl/visualization/cloud_viewer.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/filters/passthrough.h>
class cloudHandler
{
public:
cloudHandler()
{
pcl_sub = nh.subscribe("/registered_scan", 10, &cloudHandler::cloudCB, this);
pcl_pub = nh.advertise<sensor_msgs::PointCloud2>("pcl_16to2D_scan", 1);
}
void cloudCB(const sensor_msgs::PointCloud2 &input)
{
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::fromROSMsg(input, cloud);
//
pcl::PointCloud<pcl::PointXYZ>::Ptr pcloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PassThrough<pcl::PointXYZ> pass;// 创建滤波器对象
pcl::copyPointCloud(cloud, *pcloud);
pass.setInputCloud (pcloud);//设置输入点云
pass.setFilterFieldName ("z");//滤波字段名被设置为Z轴方向
pass.setFilterLimits (0.2, 1.4);//可接受的范围为(0.0,1.0)
//pass.setFilterLimitsNegative (true);//设置保留范围内 还是 过滤掉范围内
pass.filter (*cloud_filtered); //执行滤波,保存过滤结果在cloud_filtered
//
/*这段将点云z设置为统一值*/
for(int i=0;i<cloud_filtered->width;i++)
{
cloud_filtered->points[i].z=0.8;
}
/*这段给点云复制,多增加立体感beg*/
pcl::PointCloud<pcl::PointXYZ> cloud_add;
pcl::copyPointCloud(*cloud_filtered, cloud_add);
for(int h=0;h<=20;h+=2)
{
for(int i=0;i<cloud_add.width;i++)
{
cloud_add.points[i].z=(float)h/10;
}
// std::cout<<"cloud_add.points[i].z: "<<(float)h/10<<std::endl;
*cloud_filtered+=cloud_add;
}
/*这段给点云复制,多增加立体感end*/
sensor_msgs::PointCloud2 cloud_filtered_pu;
pcl::toROSMsg(*cloud_filtered, cloud_filtered_pu); //1.数据 2.时间戳
cloud_filtered_pu.header.stamp = input.header.stamp;
cloud_filtered_pu.header.frame_id = input.header.frame_id;
pcl_pub.publish(cloud_filtered_pu);
//
}
protected:
ros::NodeHandle nh;
ros::Subscriber pcl_sub;
ros::Publisher pcl_pub;
};
main (int argc, char **argv)
{
ros::init (argc, argv, "pcl_visualize");
cloudHandler handler;
ros::spin();
return 0;
}cmakelist.txt
add_executable(3d_to_2d_scan src/3d_to_2d_scan/3d_to_2d_scan.cpp)
target_link_libraries(3d_to_2d_scan ${catkin_LIBRARIES} ${PCL_LIBRARIES})三.点云数据的改变过程(实际效果)

图1.上面这个是原点云数据,下面这张由上面这张截出几条线而成

图2.把图1中的下面这张点云压缩到2D
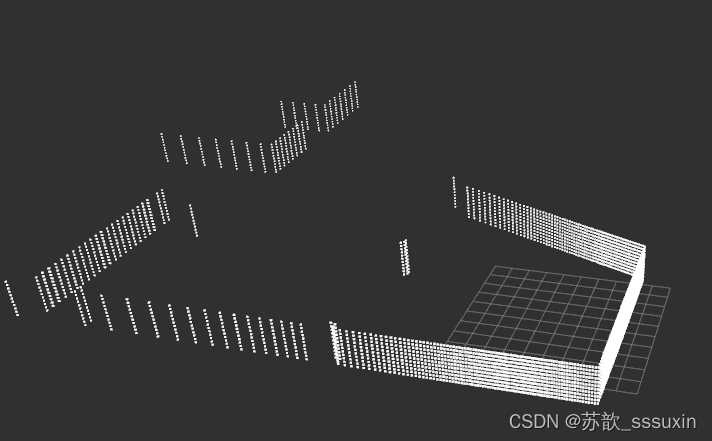
图3.z周上复制堆叠增加立体感
最后再把这个点云"cloud_filtered"发布到"/pcl_16to2D_scan"这个话题中,tare将使用这个话题的数据
sensor_msgs::PointCloud2 cloud_filtered_pu;
pcl::toROSMsg(*cloud_filtered, cloud_filtered_pu); //1.数据 2.时间戳
cloud_filtered_pu.header.stamp = input.header.stamp;
cloud_filtered_pu.header.frame_id = input.header.frame_id; //传向的frame
pcl_pub.publish(cloud_filtered_pu);此时rqt_graph中可见,tare_planner_node不再订阅"/registered_scan",转而订阅"/pcl_16to2D_scan"
















 1031
1031











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









