







ROS2采用launch.py文件来加载gazebo环境
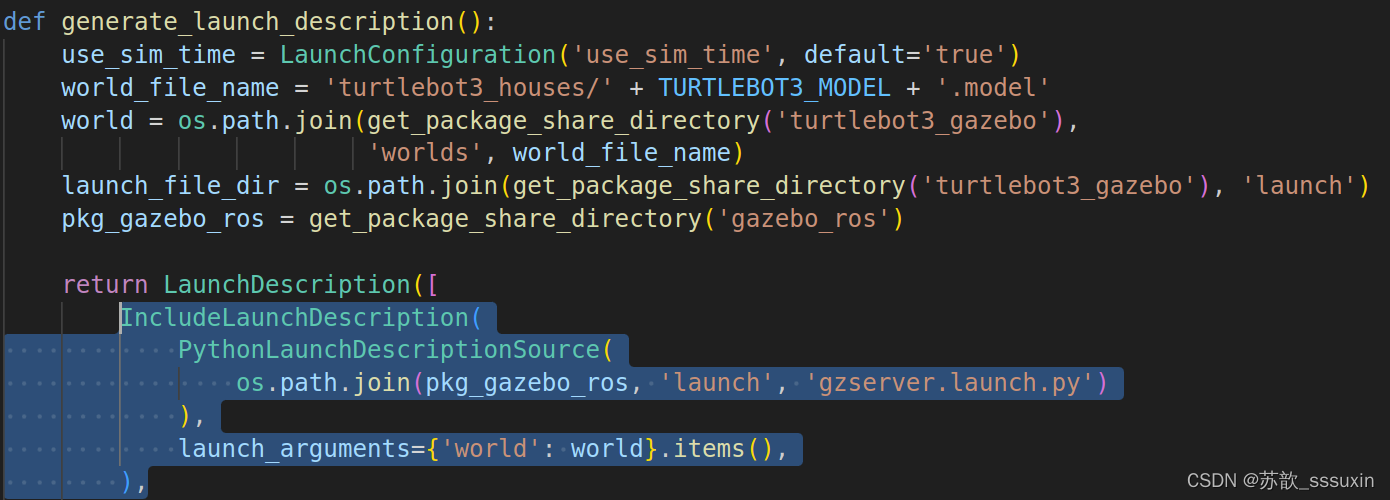
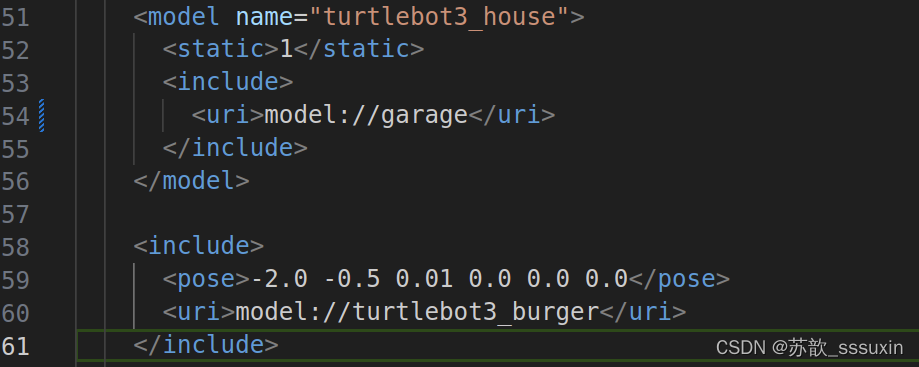
model文件里是引入环境模型和机器人模型,他们都是sdf文件
实现:步骤一
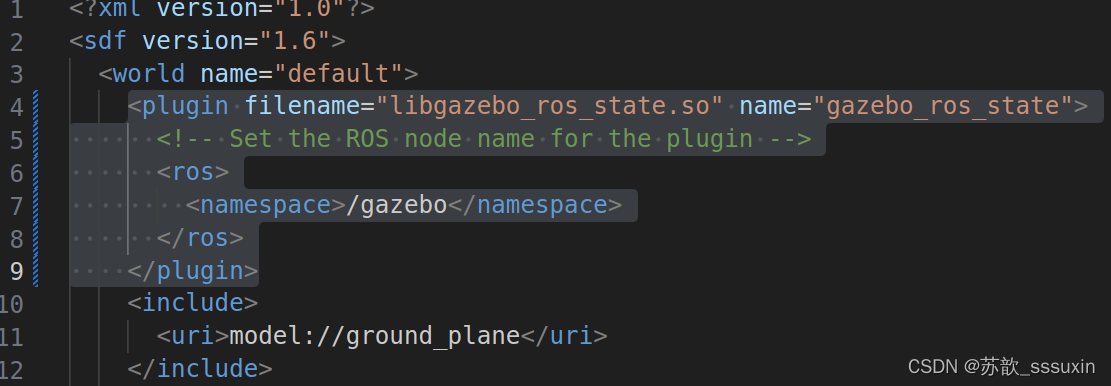
<plugin filename="libgazebo_ros_state.so" name="gazebo_ros_state">
<!-- Set the ROS node name for the plugin -->
<ros>
<namespace>/gazebo</namespace>
</ros>
</plugin>把代码放在world标签下面,然后用服务操作模型的坐标
操作方式如下(注意标签reference_frame选择world)
ros2 service call /gazebo/set_entity_state gazebo_msgs/srv/SetEntityState "state: {name: turtlebot3_burger, pose: {position:{x: 0.0, y: 0.0, z: 0.1}}, reference_frame: world}" 实现:步骤二(c++代码实现)
#include "rclcpp/rclcpp.hpp"
#include "gazebo_msgs/srv/set_entity_state.hpp"
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("gazebo_service_client");
// 创建一个用于发送服务请求的客户端
auto client = node->create_client<gazebo_msgs::srv::SetEntityState>("/gazebo/set_entity_state");
// 循环发送服务请求
int num=0;
while (rclcpp::ok()) {
num=num+1;
num=num%10;
if (client->wait_for_service(std::chrono::seconds(1))) {
auto request = std::make_shared<gazebo_msgs::srv::SetEntityState::Request>();
// 填充请求参数
request->state.name = "turtlebot3_burger";
request->state.pose.position.x = -(num+1);
request->state.pose.position.y = -(num+1);
request->state.pose.position.z = double(num%100);
request->state.reference_frame = "world";
// 发送服务请求(异步)
client->async_send_request(request);
// 可以在此添加其他操作,不需要等待响应
} else {
RCLCPP_ERROR(node->get_logger(), "Service not available");
}
// 延时一段时间后再次发送请求
std::this_thread::sleep_for(std::chrono::seconds(1));
}
rclcpp::shutdown();
return 0;
}

















 1030
1030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









