







/* Private variables ---------------------------------------------------------*/
NAND_HandleTypeDef hnand1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_FMC_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_FMC_Init();
/* USER CODE BEGIN 2 */
//HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_SET);
delay_init(216);
delay_ms(5000);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
static NAND_IDTypeDef NAND_ID;
static HAL_StatusTypeDef res;
static NAND_AddressTypeDef pAddress;
pAddress.Block = 1;
pAddress.Page = 2;
pAddress.Plane = 0;
static uint8_t pBuffer[2048];
for(uint16_t i = 0; i < 2048; i++)
{
pBuffer[i] = 2+i;
}
HAL_NAND_Erase_Block(&hnand1, &pAddress);
res = HAL_NAND_Read_Page_8b(&hnand1, &pAddress, pBuffer, 1);
if(HAL_OK == res)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
else
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
}
for(uint16_t i = 0; i < 2048; i++)
{
pBuffer[i] = 2+i;
}
res = HAL_NAND_Write_Page_8b(&hnand1, &pAddress, pBuffer, 1);
if(HAL_OK == res)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
else
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
}
for(uint16_t i = 0; i < 2048; i++)
{
pBuffer[i] = 4+i;
}
res = HAL_NAND_Read_Page_8b(&hnand1, &pAddress, pBuffer, 1);
if(HAL_OK == res)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
else
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* FMC initialization function */
static void MX_FMC_Init(void)
{
/* USER CODE BEGIN FMC_Init 0 */
/* USER CODE END FMC_Init 0 */
FMC_NAND_PCC_TimingTypeDef ComSpaceTiming = {0};
FMC_NAND_PCC_TimingTypeDef AttSpaceTiming = {0};
/* USER CODE BEGIN FMC_Init 1 */
/* USER CODE END FMC_Init 1 */
/** Perform the NAND1 memory initialization sequence
*/
hnand1.Instance = FMC_NAND_DEVICE;
/* hnand1.Init */
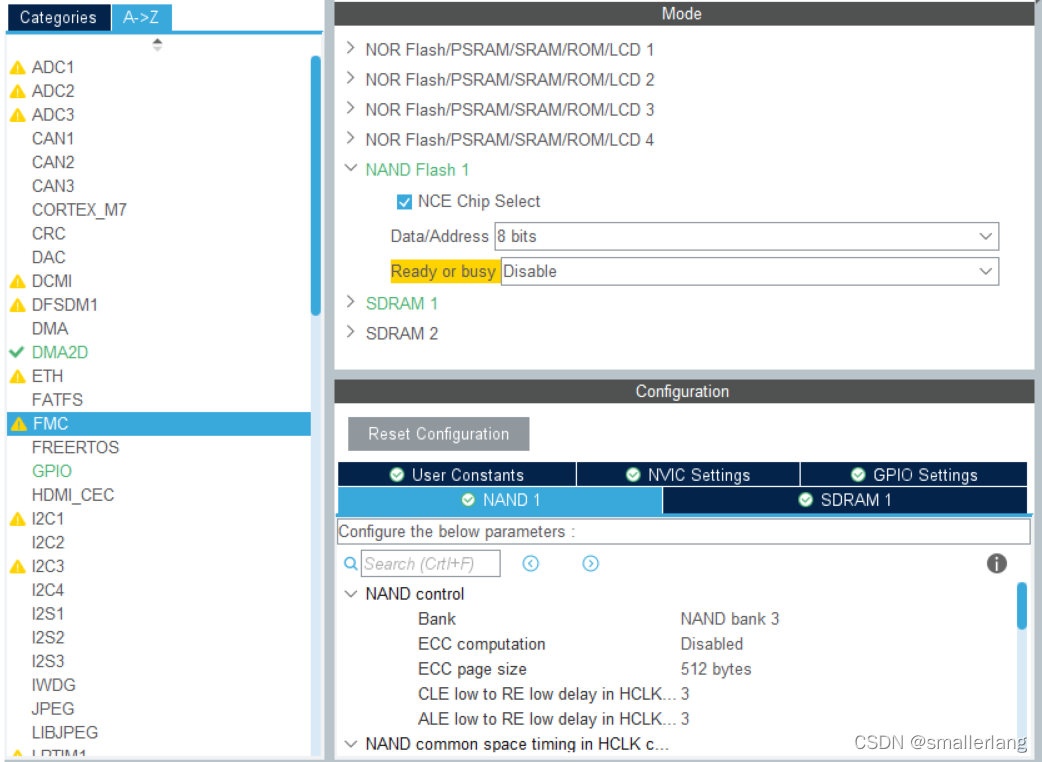
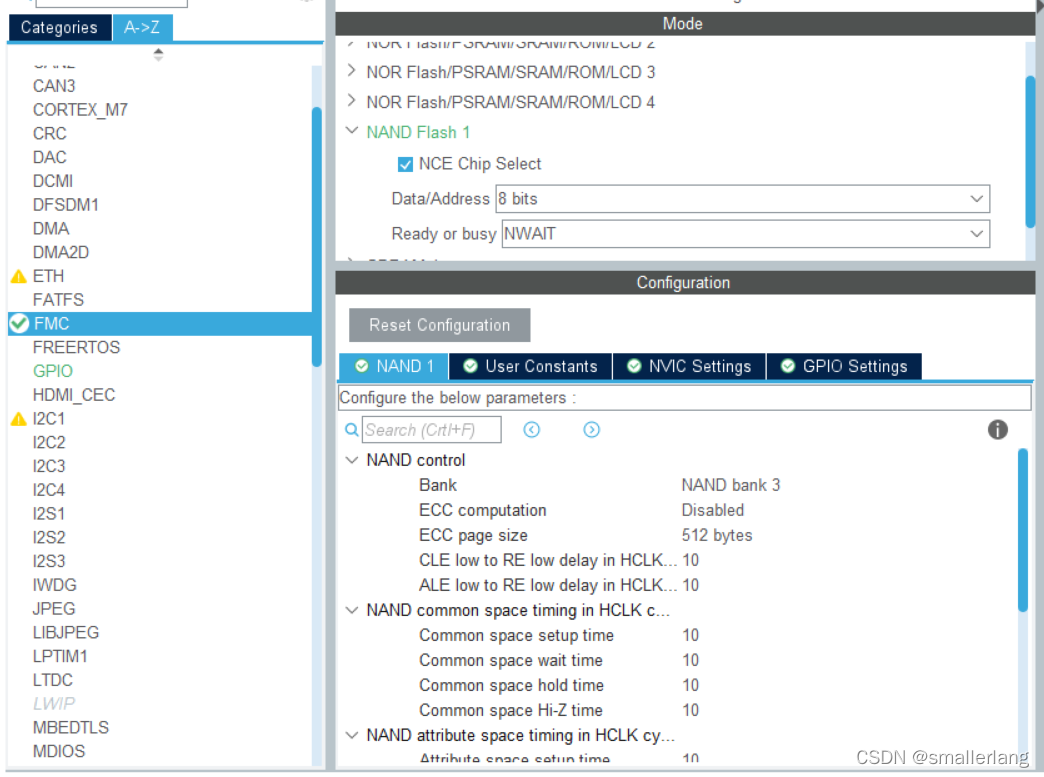
hnand1.Init.NandBank = FMC_NAND_BANK3;
hnand1.Init.Waitfeature = FMC_NAND_WAIT_FEATURE_DISABLE;
hnand1.Init.MemoryDataWidth = FMC_NAND_MEM_BUS_WIDTH_8;
hnand1.Init.EccComputation = FMC_NAND_ECC_DISABLE;
hnand1.Init.ECCPageSize = FMC_NAND_ECC_PAGE_SIZE_256BYTE;
hnand1.Init.TCLRSetupTime = 2;
hnand1.Init.TARSetupTime = 2;
/* hnand1.Config */
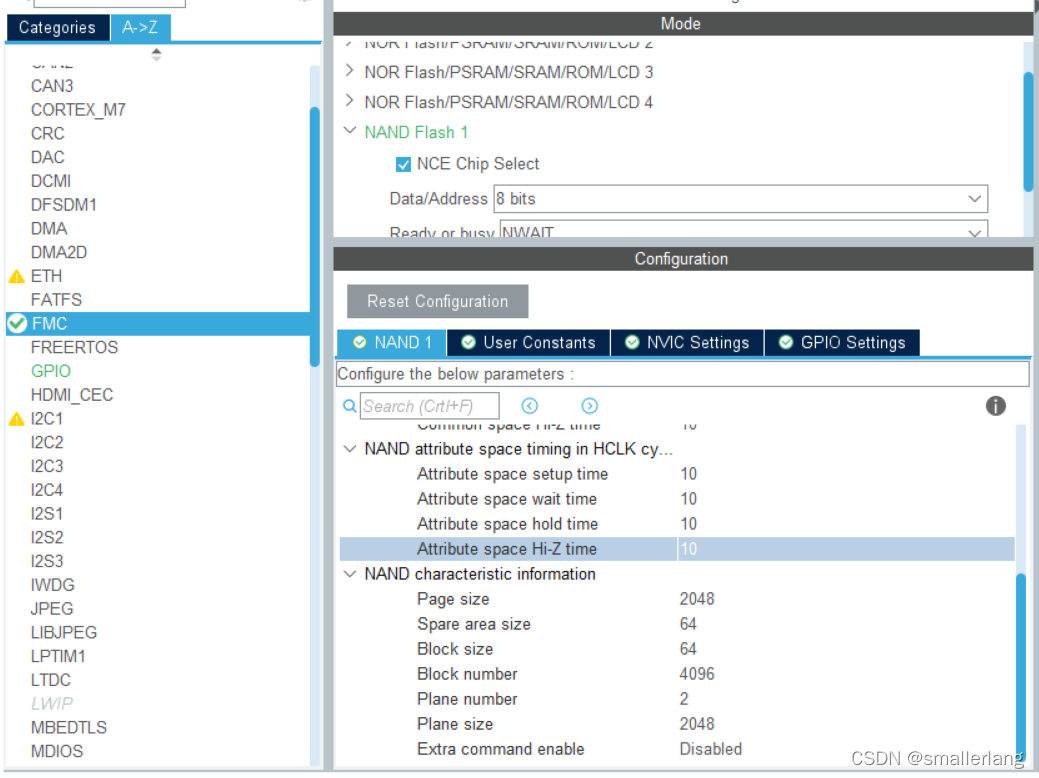
hnand1.Config.PageSize = 2048;
hnand1.Config.SpareAreaSize = 64;
hnand1.Config.BlockSize = 64;
hnand1.Config.BlockNbr = 4096;
hnand1.Config.PlaneNbr = 2;
hnand1.Config.PlaneSize = 2048;
hnand1.Config.ExtraCommandEnable = ENABLE;
/* ComSpaceTiming */
ComSpaceTiming.SetupTime = 2;
ComSpaceTiming.WaitSetupTime = 3;
ComSpaceTiming.HoldSetupTime = 3;
ComSpaceTiming.HiZSetupTime = 2;
/* AttSpaceTiming */
AttSpaceTiming.SetupTime = 2;
AttSpaceTiming.WaitSetupTime = 3;
AttSpaceTiming.HoldSetupTime = 3;
AttSpaceTiming.HiZSetupTime = 2;
if (HAL_NAND_Init(&hnand1, &ComSpaceTiming, &AttSpaceTiming) != HAL_OK)
{
Error_Handler( );
}
/* USER CODE BEGIN FMC_Init 2 */
/* USER CODE END FMC_Init 2 */
}
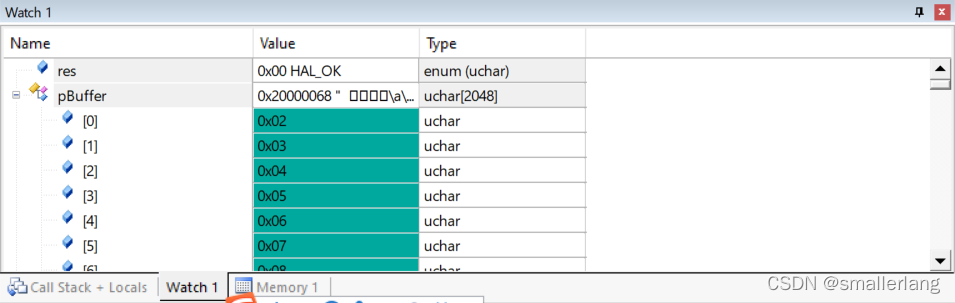
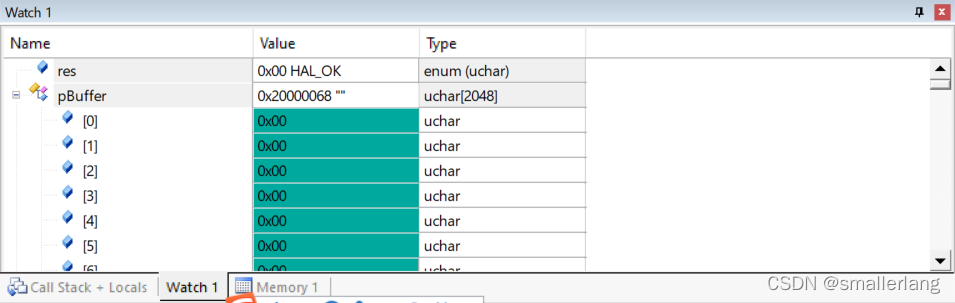
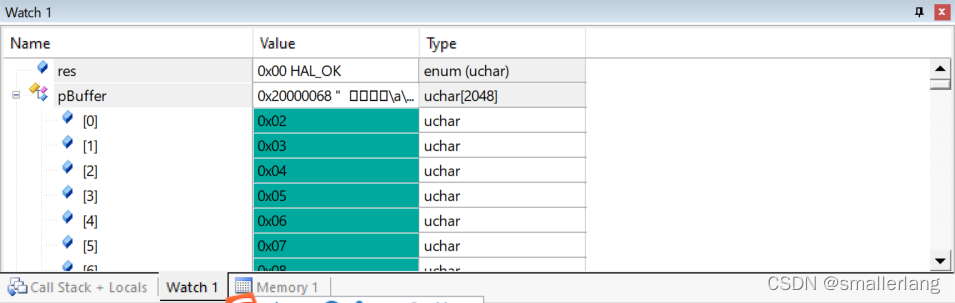
总结:
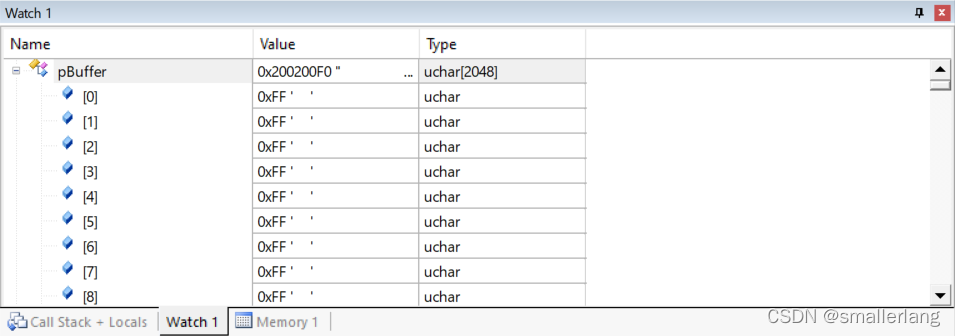
1、擦除前
2、擦除后
3、写后读
4、
5、
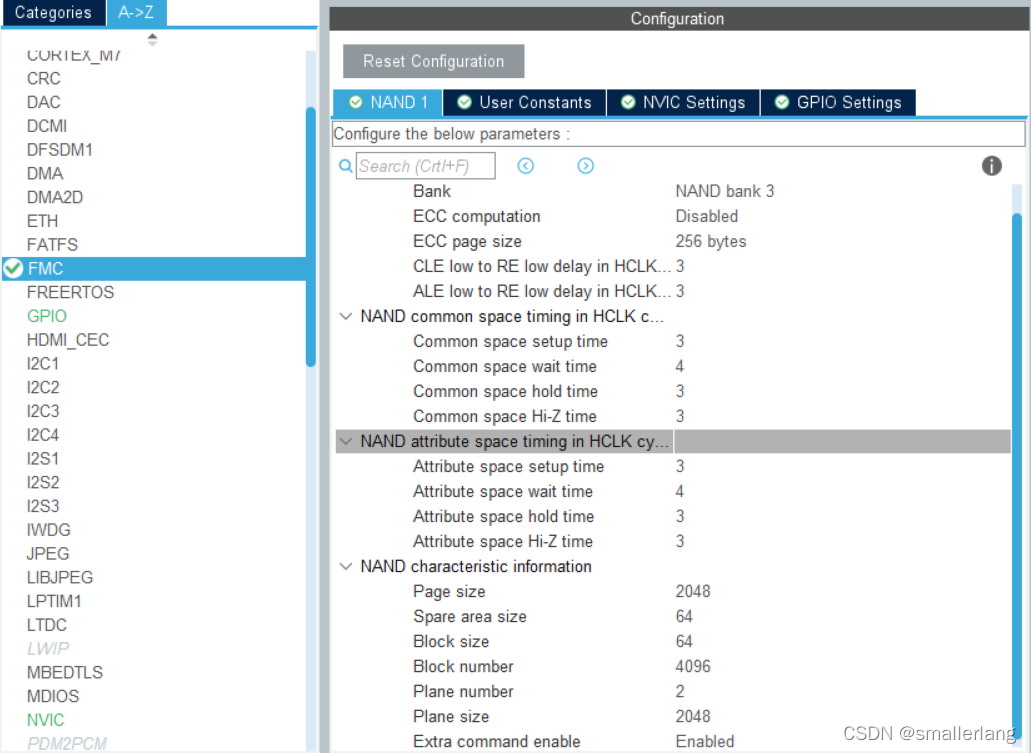
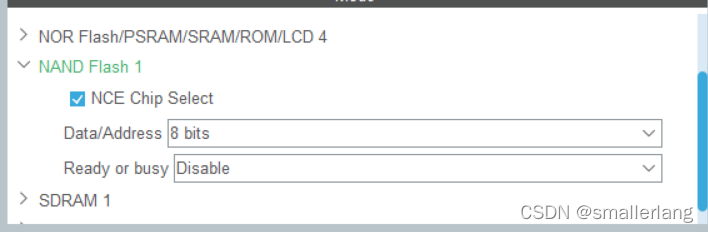
6、Extra command enable 需要设置为ENABLE ,如果设置为DISABLE读写会出错
7、擦除后数据为0x00,一直以为是0xff
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_FMC_Init();
/* USER CODE BEGIN 2 */
//HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_SET);
delay_init(216);
delay_ms(5000);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
static NAND_IDTypeDef NAND_ID;
static HAL_StatusTypeDef res;
static NAND_AddressTypeDef pAddress;
pAddress.Block = 0;
pAddress.Page = 0;
pAddress.Plane = 0;
static uint8_t pBuffer[2048];
for(uint16_t i = 0; i < 2048; i++)
{
pBuffer[i] = 2+i;
}
HAL_NAND_Erase_Block(&hnand1, &pAddress);
//NAND_EraseBlock(0);
delay_ms(4);
NAND_ReadPage(0,0,pBuffer,1023);
// res = HAL_NAND_Read_Page_8b(&hnand1, &pAddress, pBuffer, 1);
// if(HAL_OK == res)
// {
// HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
// }
// else
// {
// HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
// }
//NAND_ReadPage(2,uint16_t ColNum,uint8_t *pBuffer,uint16_t NumByteToRead);
//delay_ms(4);
for(uint16_t i = 0; i < 2048; i++)
{
pBuffer[i] = 2+i;
}
NAND_WritePage(0,0,pBuffer,1023);
// res = HAL_NAND_Write_Page_8b(&hnand1, &pAddress, pBuffer, 1);
// if(HAL_OK == res)
// {
// HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
// }
// else
// {
// HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
// }
for(uint16_t i = 0; i < 2048; i++)
{
pBuffer[i] = 4+i;
}
//
// res = HAL_NAND_Read_Page_8b(&hnand1, &pAddress, pBuffer, 1);
// if(HAL_OK == res)
// {
// HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
// }
// else
// {
// HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
// }
NAND_ReadPage(0,0,pBuffer,1023);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
总结:
1、
2、
3、此程序擦除后读出来的数据正确,都是0xFF,但是使用HAL库有问题,说明HAL库有BUG,可能是HAL库中没有延时
4、如果使用HAL库HAL_NAND_Erase_Block(&hnand1, &pAddress);擦除BLOCK,则函数后需要添加延时
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "delay.h"
#include "bsp_printf.h"
#include "bsp_key.h"
#include "string.h"
#include "bsp_sdram.h"
//#include "bsp_malloc.h"
//#include "bsp_sdmmc.h"
#include "ff.h" /* Obtains integer types */
//#include "bsp_w25qxx.h"
#include "bsp_ftl.h"
#include "bsp_nand.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
NAND_HandleTypeDef hnand1;
/* USER CODE BEGIN PV */
volatile uint8_t rx_done, tx_done;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_FMC_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
// SCB_EnableICache();//ʹÄÜI-Cache
// SCB_EnableDCache();//ʹÄÜD-Cache
// SCB->CACR|=1<<2; //Ç¿ÖÆD-Cache͸д,Èç²»¿ªÆô,ʵ¼ÊʹÓÃÖпÉÄÜÓöµ½¸÷ÖÖÎÊÌâ
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_FMC_Init();
/* USER CODE BEGIN 2 */
#define DATA_SIZE 10000
#define DATA_ADDR 380
delay_init(216);
delay_ms(5000);
static HAL_StatusTypeDef res;
static NAND_AddressTypeDef pAddress;
pAddress.Block = 1;
pAddress.Page = 2;
pAddress.Plane = 0;
static uint8_t pBuffer[2048];
for(uint16_t i = 0; i < 2048; i++)
{
pBuffer[i] = 2+i;
}
HAL_NAND_Erase_Block(&hnand1, &pAddress);
res = HAL_NAND_Read_Page_8b(&hnand1, &pAddress, pBuffer, 1);
if(HAL_OK == res)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
else
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
delay_ms(1000);
printf("hello world!\r\n");
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
/** Configure LSE Drive Capability
*/
HAL_PWR_EnableBkUpAccess();
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 432;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 9;
RCC_OscInitStruct.PLL.PLLR = 2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_7) != HAL_OK)
{
Error_Handler();
}
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_USART1;
PeriphClkInitStruct.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Enables the Clock Security System
*/
HAL_RCC_EnableCSS();
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/* FMC initialization function */
static void MX_FMC_Init(void)
{
/* USER CODE BEGIN FMC_Init 0 */
/* USER CODE END FMC_Init 0 */
FMC_NAND_PCC_TimingTypeDef ComSpaceTiming = {0};
FMC_NAND_PCC_TimingTypeDef AttSpaceTiming = {0};
/* USER CODE BEGIN FMC_Init 1 */
/* USER CODE END FMC_Init 1 */
/** Perform the NAND1 memory initialization sequence
*/
hnand1.Instance = FMC_NAND_DEVICE;
/* hnand1.Init */
hnand1.Init.NandBank = FMC_NAND_BANK3;
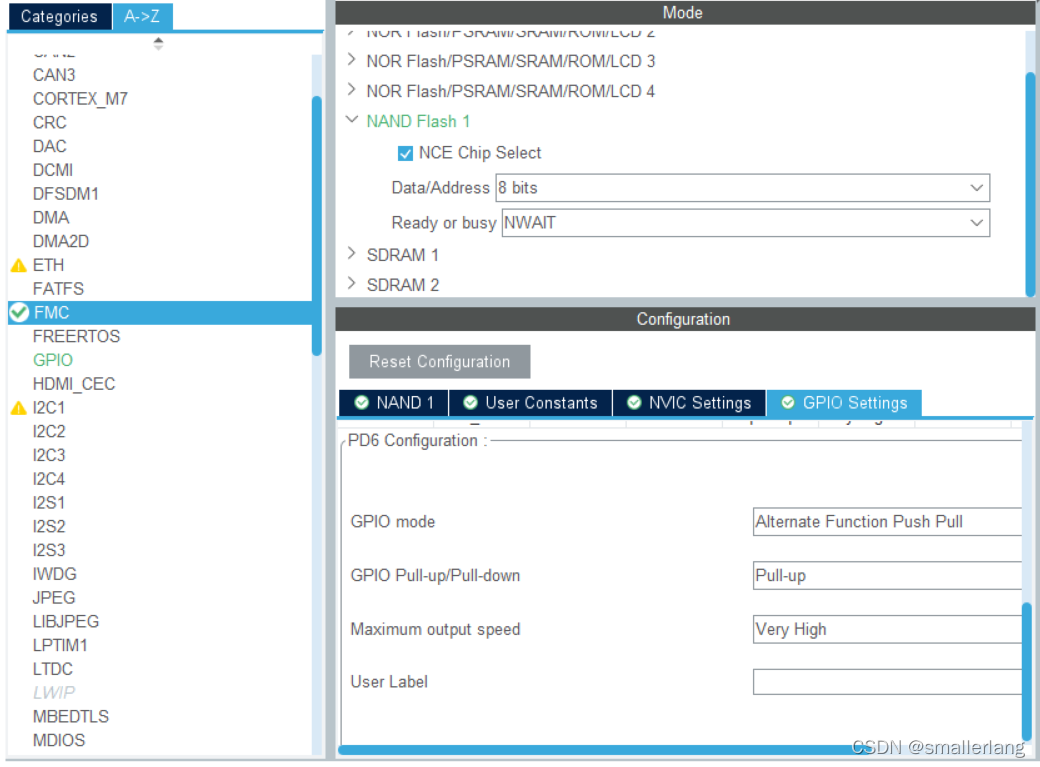
hnand1.Init.Waitfeature = FMC_NAND_WAIT_FEATURE_ENABLE;
hnand1.Init.MemoryDataWidth = FMC_NAND_MEM_BUS_WIDTH_8;
hnand1.Init.EccComputation = FMC_NAND_ECC_DISABLE;
hnand1.Init.ECCPageSize = FMC_NAND_ECC_PAGE_SIZE_512BYTE;
hnand1.Init.TCLRSetupTime = 9;
hnand1.Init.TARSetupTime = 9;
/* hnand1.Config */
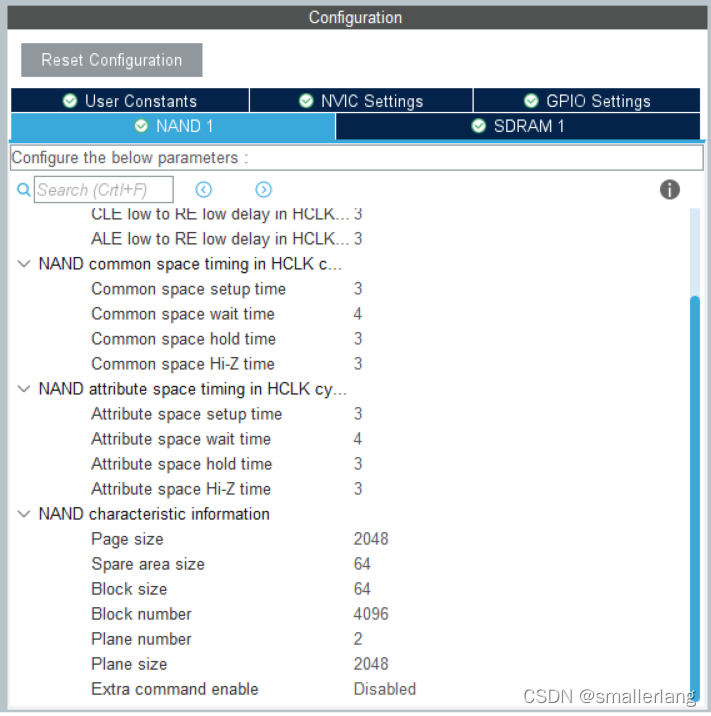
hnand1.Config.PageSize = 2048;
hnand1.Config.SpareAreaSize = 64;
hnand1.Config.BlockSize = 64;
hnand1.Config.BlockNbr = 4096;
hnand1.Config.PlaneNbr = 2;
hnand1.Config.PlaneSize = 2048;
hnand1.Config.ExtraCommandEnable = DISABLE;
/* ComSpaceTiming */
ComSpaceTiming.SetupTime = 9;
ComSpaceTiming.WaitSetupTime = 9;
ComSpaceTiming.HoldSetupTime = 10;
ComSpaceTiming.HiZSetupTime = 9;
/* AttSpaceTiming */
AttSpaceTiming.SetupTime = 9;
AttSpaceTiming.WaitSetupTime = 9;
AttSpaceTiming.HoldSetupTime = 10;
AttSpaceTiming.HiZSetupTime = 9;
if (HAL_NAND_Init(&hnand1, &ComSpaceTiming, &AttSpaceTiming) != HAL_OK)
{
Error_Handler( );
}
/* USER CODE BEGIN FMC_Init 2 */
/* USER CODE END FMC_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_5, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PF7 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_QUADSPI;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : PH2 PH3 */
GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOH, &GPIO_InitStruct);
/*Configure GPIO pins : PB0 PB5 */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB1 */
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB2 */
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_QUADSPI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB6 */
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF10_QUADSPI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
总结:
1、
2、
3、
4、

















 1108
1108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









