







GraphHopper Routing Engine是一个基于开源的路线规划引擎,用于解决实时路径规划和导航需求。它提供了高性能和灵活性,可用于构建具有定制化路线规划功能的应用程序。
GraphHopper Routing Engine的主要特点包括:
①快速路线规划:
GraphHopper使用高效的数据结构和算法,可以在大规模地图上进行快速的路径规划,包括车辆、自行车、步行等不同类型的交通模式。
②定制化规划策略:
通过使用GraphHopper的API,你可以通过设置一系列参数和规则来定义自定义的路线规划策略,以满足特定的需求,如避开特定道路、考虑实时交通状况等。
③多种导航模式:
GraphHopper支持不同的导航模式,包括实时导航、离线导航和批量导航等。你可以根据需要选择适合的导航模式。
④高度可定制:
GraphHopper提供了丰富的API和插件机制,使你可以根据自己的需求对其进行扩展和定制,例如添加自定义的地图数据源、导入特定格式的地图文件等。
⑤跨平台支持:
GraphHopper可以在多种平台上运行,包括服务器、移动设备和嵌入式系统等。这使得它适用于各种应用场景。
总结来说,GraphHopper Routing Engine是一个功能强大的开源路线规划引擎,具有快速、灵活和可定制化的特性,可用于构建各种路径规划和导航应用。无论是实时导航、离线导航还是批量导航,GraphHopper都能提供可靠的解决方案。
源代码地址:https://github.com/graphhopper/graphhopper
在线访问地址:GraphHopper API Explorer
一、使用说明:
1.1服务启动
java -D"dw.graphhopper.datareader.file=taiwan.pbf" -jar ./graphhopper-web-7.0.jar server ./config-example.yml
启动方式中可以指定数据文件,服务配置在config-example.xml可以修改。
默认配置仅支持car类型路径分析。
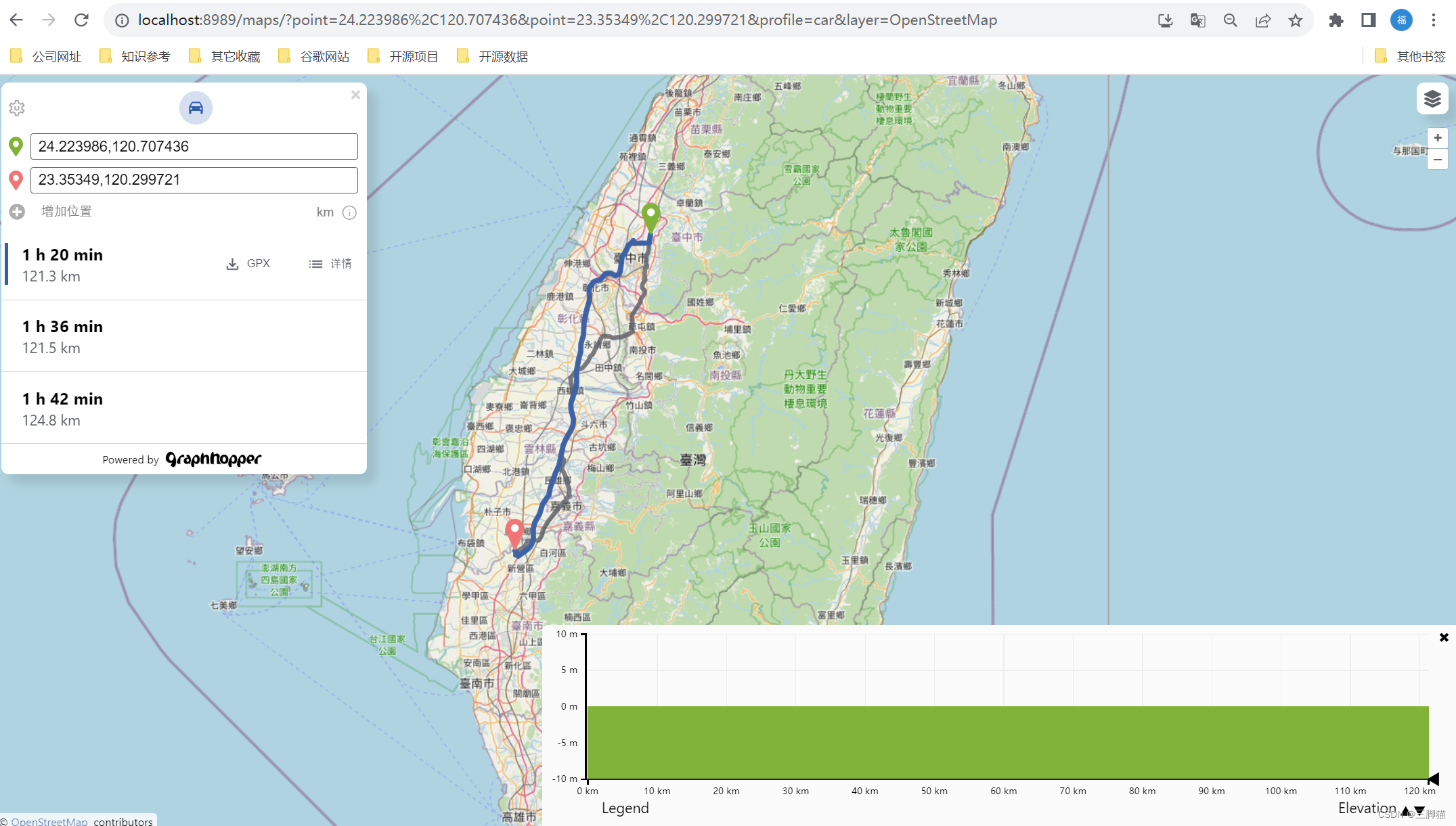
启动会访问示例页面地址:http://localhost:8989/
1.2.调用接口post请求
http://localhost:8989/route?key=
请求参数:
{
"points": [
[121.04456322656249, 24.701389058275836],
[120.79737084374999, 24.176287138944744]
],
"profile": "car",
"elevation": true,
"debug": false,
"instructions": true,
"locale": "zh_CN",
"optimize": "false",
"points_encoded": true,
"snap_preventions": ["ferry"],
"details": ["road_class", "road_environment", "max_speed", "average_speed"],
"alternative_route.max_paths": 3,
"algorithm": "alternative_route"
}
--设置限行区域示例
{
"points": [
[121.04456322656249, 24.701389058275836],
[120.79737084374999, 24.176287138944744]
],
"profile": "car",
"elevation": false,
"debug": false,
"instructions": true,
"locale": "zh_CN",
"type":"json",
"optimize": "true",
"points_encoded": true,
"snap_preventions": ["ferry"],
"details": ["road_class", "road_environment", "max_speed", "average_speed"],
"alternative_route.max_paths": 3,
"algorithm": "alternative_route",
"ch.disable":true,
"custom_model":{
"priority": [
{
"if": "in_berlin_bbox",
"multiply_by": "0"
}
],
"areas": {
"type": "FeatureCollection",
"features": [
{
"id": "berlin_bbox",
"type": "Feature",
"geometry": {
"type": "Polygon",
"coordinates": [[[121.286608, 24.882966], [121.219317, 24.841848], [121.123959, 24.882639], [121.159483, 24.846792], [121.286608, 24.882966]]]
}
}
]
}
}
}
}
1.3.请求参数说明:
profile 路径规划方式
point=lat,lon - 指定起点或途经点的坐标,可以有多个point参数。
vehicle=car - 指定使用的车型,如car、bike、foot等。
locale=zh - 设置返回的语言,如中文zh。
instructions=true - 是否返回路线指引。
elevation=true - 是否返回高程信息。
points_encoded=false - coord参数是否已经编码,如果请求时已经完成编码可以设置为true以加速。
weighting=fastest - 路线优化策略,如最快fastest、最短shortest等。
turn_costs=true - 是否考虑转向时间成本。
ch.disable=true - 禁用某些方式。
debug=true - 输出 debug 信息。
二、数据生产
2.1 下载osm数据
路图的地址:http://download.geofabrik.de/ 直接下载pbf既可以使用
2.2地图文件.osm与.pbf相互转换
1. 下载转换器osmosis
下载地址:https://github.com/WonderfulGPSGroup/osmosis
2. 解压
下载后解压,并且双击运行./osmosis/bin/osmosis.bat
开始转换
将需要转换的文件拖到./osmosis/bin文件夹下,打开powershell进入./osmosis/bin目录下,运行以下命令:
# osm转pbf
./osmosis --read-xml .\输入的文件名.osm --write-pbf ./输入的文件名.osm.pbf
# pbf转osm
./osmosis --read-pbf .\输入的文件名.pbf --write-xml ./输入的文件名.osm
写在最后:
GraphHopper性能非常好,下载pbf后启动服务会自动生成拓扑缓存文件,所以第一次启动会慢一些,第二次启动就会秒速启动,本文仅是对GraphHopper基础使用进行了说明,对于其他规划模式如自行车、徒步、货车等将会在后续文章探索,还有路线规划中的各种条件设置,比如限高、限速、铁路以及铁路公路混合导航是否支持,将继续探索。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









