







原文:http://blog.csdn.NET/wrj19860202/article/details/6334275
Zernike在1934年引入了一组定义在单位圆 上的复值函数集{
上的复值函数集{ },{
},{ }具有完备性和正交性,使得它可以表示定义在单位圆盘内的任何平方可积函数。其定义为:
}具有完备性和正交性,使得它可以表示定义在单位圆盘内的任何平方可积函数。其定义为:

 表示原点到点
表示原点到点 的矢量长度;
的矢量长度; 表示矢量
表示矢量 与
与 轴逆时针方向的夹角。
轴逆时针方向的夹角。
 是实值径向多项式:
是实值径向多项式:

称为Zernike多项式。
Zernike多项式满足正交性:

其中
 为克罗内克符号,
为克罗内克符号,

 是
是 的共轭多项式。
的共轭多项式。
由于Zernike多项式的正交完备性,所以在单位圆内的任何图像 都可以唯一的用下面式子来展开:
都可以唯一的用下面式子来展开:
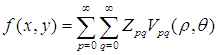
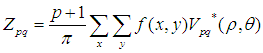
式子中 就是Zernike矩,其定义为:
就是Zernike矩,其定义为:

注意式子中 和
和 采用的是不同的坐标系(
采用的是不同的坐标系( 采用直角坐标,而
采用直角坐标,而 采用的极坐标系,在计算的时候要进行坐标转换)
采用的极坐标系,在计算的时候要进行坐标转换)
对于离散的数字图像,可将积分形式改为累加形式:

我们在计算一副图像的Zernike矩时,必须将图像的中心移到坐标的原点,将图像的像素点映射到单位圆内,由于Zernike矩具有旋转不变性,我们可以将 作为图像的不变特征,其中图像的低频特征有p值小的
作为图像的不变特征,其中图像的低频特征有p值小的 提取,高频特征由p值高的
提取,高频特征由p值高的 提取。从上面可以看出,Zernike矩可以构造任意高阶矩。
提取。从上面可以看出,Zernike矩可以构造任意高阶矩。
由于Zernike矩只具有旋转不变性,不具有平移和尺度不变性,所以要提前对图像进行归一化,我们采用标准矩的方法来归一化一副图像,标准矩定义为:
 ,
,
由标准矩我们可以得到图像的"重心",


我们将图像的"重心"移动到单位圆的圆心(即坐标的原点),便解决了平移问题。
我们知道 表征了图像的"面积",归一图像的尺度无非就是把他们的大小变为一致的,(这里的大小指的是图像目标物的大小,不是整幅图像的大小,"面积"也是目标物的"面积")。
表征了图像的"面积",归一图像的尺度无非就是把他们的大小变为一致的,(这里的大小指的是图像目标物的大小,不是整幅图像的大小,"面积"也是目标物的"面积")。
所以,对图像进行变换 就可以达到图像尺寸一致的目的。
就可以达到图像尺寸一致的目的。
综合上面结果,对图像进行 变换,最终图像
变换,最终图像 的Zernike矩就是平移,尺寸和旋转不变的。
的Zernike矩就是平移,尺寸和旋转不变的。
Zernike 不变矩相比 Hu 不变矩识别效果会好一些,因为他描述了图像更多的细节内容,特别是高阶矩,但是由于 Zernike 不变矩计算时间比较长,所以出现了很多快速的算法,大家可以 google 一下。
用 Zernike 不变矩来识别手势轮廓,识别率大约在 40%~50% 之间,跟 Hu 不变矩一样, Zernike 不变矩一般用来描述目标物形状占优势的图像,不适合用来描述纹理丰富的图像,对于纹理图像,识别率一般在 20%~30% 左右,很不占优势。
- C++代码如下:
- /*计算一行的像素个数
- imwidth:图像宽度
- deep:图像深度(8位灰度图为1,24位彩色图为3)
- */
- #define bpl(imwidth, deep) ((imwidth*deep*8+31)/32*4)
- /*获取像素值
- psrcBmp:图像数据指针
- nsrcBmpWidth:图像宽度,以像素为单位
- x,y:像素点
- deep:图像的位数深度,(1表示8位的灰度图,3表示24位的RGB位图)
- */
- COLORREF J_getpixel( const BYTE *psrcBmp, const int nsrcBmpWidth, const int x, const int y, int deep = 3)
- {
- if (deep == 3)
- {
- return RGB(*(psrcBmp + x*3 + y*bpl(nsrcBmpWidth, deep) + 2 ) ,
- *(psrcBmp + x*3 + y*bpl(nsrcBmpWidth, deep) + 1 ) ,
- *(psrcBmp + x*3 + y*bpl(nsrcBmpWidth, deep) +0 ));
- }
- else if (deep == 1)
- {
- return *(psrcBmp + x + y*bpl(nsrcBmpWidth, deep));
- }
- }
- //获取标准矩(只支持8位灰度图)
- void GetStdMoment(BYTE *psrcBmp ,
- int nsrcBmpWidth,
- int nsrcBmpHeight,
- double *m)
- {
- for ( int p = 0 ; p < 2 ; p++ )
- for ( int q = 0 ; q < 2 ; q++ )
- {
- if( p == 1 && q == 1)
- break;
- for ( int y = 0 ; y < nsrcBmpHeight ; y++ )
- for ( int x = 0 ; x < nsrcBmpWidth ; x++ )
- m[p*2+q] += (pow( (double)x , p ) * pow( (double)y , q ) * J_getpixel(psrcBmp , nsrcBmpWidth , x ,y, 1));
- }
- }
- //阶乘
- double Factorial( int n )
- {
- if( n < 0 )
- return -1;
- double m = 1;
- for(int i = 2 ; i <= n ; i++)
- {
- m *= i;
- }
- return m;
- }
- //阶乘数,计算好方便用,提高速度
- double factorials[11] = {1 , 1 , 2 , 6 , 24 , 120 , 720 , 5040 , 40320 , 362880 , 39916800};
- //把图像映射到单位圆,获取像素极坐标半径
- double GetRadii(int nsrcBmpWidth,
- int nsrcBmpHeight,
- int x0,
- int y0,
- int x,
- int y)
- {
- double lefttop = sqrt(((double)0 - x0)*(0 - x0) + (0 - y0)*(0 - y0));
- double righttop = sqrt(((double)nsrcBmpWidth - 1 - x0)*(nsrcBmpWidth - 1 - x0) + (0 - y0)*(0 - y0));
- double leftbottom = sqrt(((double)0 - x0)*(0 - x0) + (nsrcBmpHeight - 1 - y0)*(nsrcBmpHeight - 1 - y0));
- double rightbottom = sqrt(((double)nsrcBmpWidth - 1 - x0)*(nsrcBmpWidth - 1 - x0) + (nsrcBmpHeight - 1 - y0)*(nsrcBmpHeight - 1 - y0));
- double maxRadii = lefttop;
- maxRadii < righttop ? righttop : maxRadii;
- maxRadii < leftbottom ? leftbottom : maxRadii;
- maxRadii < rightbottom ? rightbottom : maxRadii;
- double Radii = sqrt(((double)x - x0)*(x - x0) + (y - y0)*(y - y0))/maxRadii;
- if(Radii > 1)
- {
- Radii = 1;
- }
- return Radii;
- }
- //把图像映射到单位圆,获取像素极坐标角度
- double GetAngle(int nsrcBmpWidth,
- int nsrcBmpHeight,
- int x,
- int y)
- {
- double o;
- double dia = sqrt((double)nsrcBmpWidth*nsrcBmpWidth + nsrcBmpHeight*nsrcBmpHeight);
- int x0 = nsrcBmpWidth / 2;
- int y0 = nsrcBmpHeight / 2;
- double x_unity = (x - x0)/(dia/2);
- double y_unity = (y - y0)/(dia/2);
- if( x_unity == 0 && y_unity >= 0 )
- o=pi/2;
- else if( x_unity ==0 && y_unity <0)
- o=1.5*pi;
- else
- o=atan( y_unity / x_unity );
- if(o*y<0) //第三象限
- o=o+pi;
- return o;
- }
- //Zernike不变矩
- J_GetZernikeMoment(BYTE *psrcBmp ,
- int nsrcBmpWidth,
- int nsrcBmpHeight,
- double *Ze )
- {
- double R[count][count] = {0.0};
- double V[count][count] = {0.0};
- double M[4] = {0.0};
- GetStdMoment(psrcBmp , nsrcBmpWidth , nsrcBmpHeight , M);
- int x0 = (int)(M[2]/M[0]+0.5);
- int y0 = (int)(M[1]/M[0]+0.5);
- for(int n = 0 ; n < count ; n++)
- {
- for (int m = 0 ; m < count ; m++)
- {
- //优化算法,只计算以下介数
- if( (n == 1 && m == 0) ||
- (n == 1 && m == 1) ||
- (n == 2 && m == 0) ||
- (n == 2 && m == 1) ||
- (n == 2 && m == 2) ||
- (n == 3 && m == 0) ||
- (n == 3 && m == 1) ||
- (n == 3 && m == 2) ||
- (n == 3 && m == 3) ||
- (n == 4 && m == 0) ||
- (n == 4 && m == 1) ||
- (n == 4 && m == 2) ||
- (n == 4 && m == 3) ||
- (n == 4 && m == 4))
- {
- for(int y = 0 ; y < nsrcBmpHeight ; y++)
- {
- for (int x = 0 ; x < nsrcBmpWidth ; x++)
- {
- for(int s = 0 ; (s <= (n - m)/2 ) && n >= m ; s++)
- {
- R[n][m] += pow( -1.0, s )
- * ( n - s > 10 ? Factorial( n - s ) : factorials[ n - s ] )
- * pow( GetRadii( nsrcBmpWidth, nsrcBmpHeight, x0, y0, x, y ), n - 2 * s )
- / ( ( s > 10 ? Factorial( s ) : factorials[ s ] )
- * ( ( n + m ) / 2 - s > 10 ? Factorial( ( n + m ) / 2 - s ) : factorials[ ( n + m ) / 2 - s ] )
- * ( ( n - m ) / 2 - s > 10 ? Factorial( ( n - m ) / 2 - s ) : factorials[ ( n - m ) / 2 - s ] ) );
- }
- Ze[ n * count + m ] += R[ n ][ m ]
- * J_getpixel( psrcBmp, nsrcBmpWidth, x ,y, 1)
- * cos( m * GetAngle( nsrcBmpWidth, nsrcBmpHeight, x, y) );//实部
- V[n][m] += R[ n ][ m ]
- * J_getpixel( psrcBmp, nsrcBmpWidth, x, y, 1)
- * sin( m * GetAngle( nsrcBmpWidth, nsrcBmpHeight, x, y ) );//虚部
- R[n][m] = 0.0;
- }
- }
- *(Ze+n*count + m) = sqrt( (*(Ze+n*count + m))*(*(Ze+n*count + m)) + V[n][m]*V[n][m] )*(n+1)/pi/M[0];
- }
- }
- }
- }















 2439
2439











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









