







本文旨在帮助读者完成2D栅格地图上的RS-A*路径规划算法,便于进行车辆导航。
废话不多说,直接开始!
一、2D栅格地图准备
2D栅格地图有两种途径:
1. 2D激光SLAM算法直接获取;
2. 3D激光SLAM算法获取点云地图后投影获取:3D激光SLAM点云地图pcd转导航可用的2D栅格地图_pcd2pgm-CSDN博客
二、Hybrid A*算法
安装Hybrid A*:
#创建工作空间
mkdir -p ~/hy_astar/src
cd ~/hy_astar/src
catkin_init_workspace
#克隆代码
git clone https://github.com/zm0612/Hybrid_A_Star.git将所得的2D栅格地图pgm文件复制到Hybrid_A_Star/maps下,并替换Hybrid_A_Star/maps下的yaml文件。
一般情况下我们的栅格地图的分辨率均为0.05,将Hybrid_A_Star/src/hybrid_a_star_flow.cpp中的:
const double map_resolution = 0.2;
kinodynamic_astar_searcher_ptr_->Init(
current_costmap_ptr_->info.origin.position.x,
1.0 * current_costmap_ptr_->info.width * current_costmap_ptr_->info.resolution,
current_costmap_ptr_->info.origin.position.y,
1.0 * current_costmap_ptr_->info.height * current_costmap_ptr_->info.resolution,
current_costmap_ptr_->info.resolution,
map_resolution
);
unsigned int map_w = std::floor(current_costmap_ptr_->info.width / map_resolution);
unsigned int map_h = std::floor(current_costmap_ptr_->info.height / map_resolution);
for (unsigned int w = 0; w < map_w; ++w) {
for (unsigned int h = 0; h < map_h; ++h) {
auto x = static_cast<unsigned int> ((w + 0.5) * map_resolution
/ current_costmap_ptr_->info.resolution);
auto y = static_cast<unsigned int> ((h + 0.5) * map_resolution
/ current_costmap_ptr_->info.resolution);
if (current_costmap_ptr_->data[y * current_costmap_ptr_->info.width + x]) {
kinodynamic_astar_searcher_ptr_->SetObstacle(w, h);
}
}
}修改为:
const double map_resolution = 0.05;
kinodynamic_astar_searcher_ptr_->Init(
current_costmap_ptr_->info.origin.position.x,
1.0 * current_costmap_ptr_->info.width * current_costmap_ptr_->info.resolution,
current_costmap_ptr_->info.origin.position.y,
1.0 * current_costmap_ptr_->info.height * current_costmap_ptr_->info.resolution,
current_costmap_ptr_->info.resolution,
map_resolution);
unsigned int map_w = std::floor(current_costmap_ptr_->info.width);
unsigned int map_h = std::floor(current_costmap_ptr_->info.height);
for (unsigned int w = 0; w < map_w; ++w)
{
for (unsigned int h = 0; h < map_h; ++h)
{
if (current_costmap_ptr_->data[h * current_costmap_ptr_->info.width + w] > 0)
{
kinodynamic_astar_searcher_ptr_->SetObstacle(w, h);
}
}
} 注意这里的map_resolution应与yaml中一致,修改之后完成编译:
cd ~/hy_astar
catkin_make三、运行
编译完成后运行代码:
cd ~/hy_astar
source devel/setup.bash
roslaunch hybrid_a_star run_hybrid_a_star.launch运行成功打开rviz界面,在地图的可行区域内用rviz中的2D Pose Estimate设置规划起点,用2D Nav Goal设置终点,短暂等待后规划出一条基于RS曲线的符合车辆运动学约束的路径:
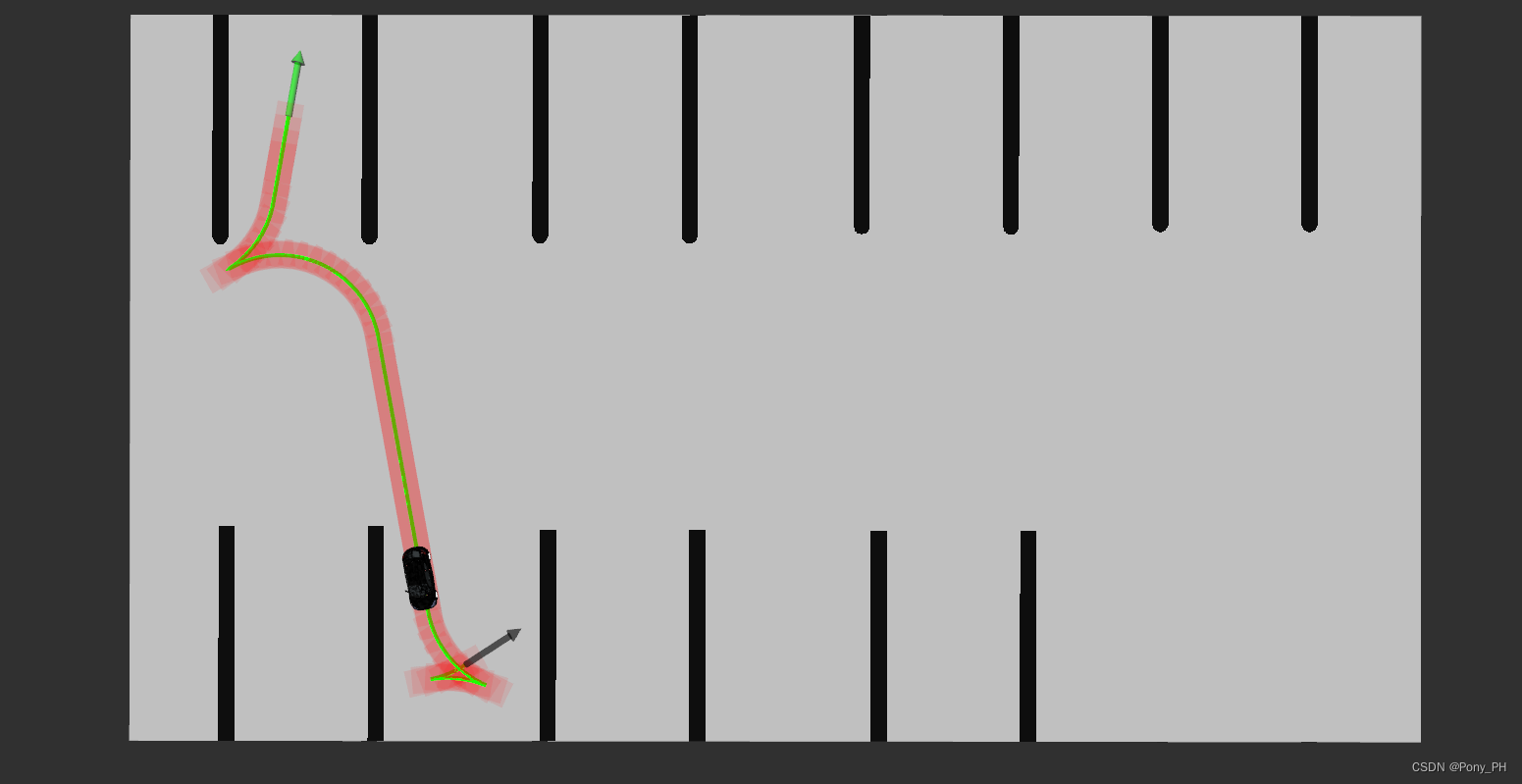
至此,便完成了符合车辆运动学约束的路径规划!
如需适配到其他模块,例如自动生成轨迹,替换由手动给定起始末端位姿方式,则需修改Hybrid_A_Star/src/hybrid_a_star_flow.cpp中订阅的/initialpose和/move_base_simple/goal话题!
另外以上代码在碰撞检测时,将车辆轮廓限定为矩形,矩形大小通过Hybrid_A_Star/src/hybrid_a_star.cpp的SetVehicleShape函数设定,适配自己的车型需要修改其函数参数。


















 1622
1622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









