




 本文介绍了如何使用L298N电机驱动器控制直流电机,包括PWM技术控制速度和H桥电路控制旋转方向。通过连接到Arduino,详细解释了各个引脚的功能和操作方法,以及如何编写示例代码实现电机的简单控制。
本文介绍了如何使用L298N电机驱动器控制直流电机,包括PWM技术控制速度和H桥电路控制旋转方向。通过连接到Arduino,详细解释了各个引脚的功能和操作方法,以及如何编写示例代码实现电机的简单控制。
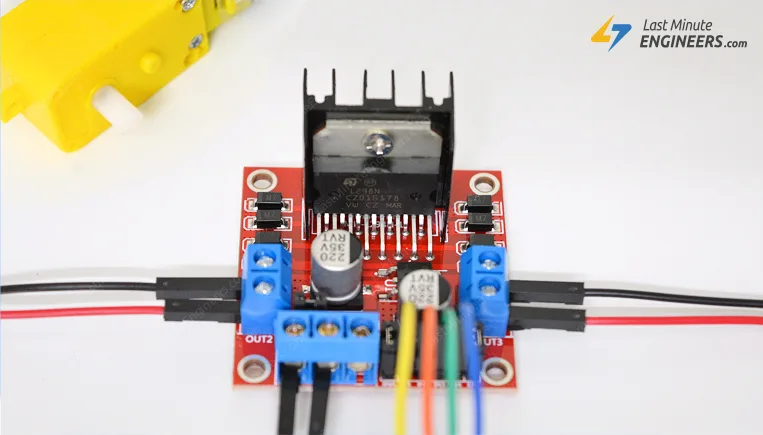
虽然您最终需要学习控制直流电机才能构建自己的机器人,但您可能需要一些更容易上手的东西 - 这就是 L298N 电机驱动器的用武之地。它可以控制速度和旋转两个直流电机的方向。此外,它还可以
控制直流电机
只有能够控制直流电机的速度和旋转方向,我们才能完全控制它。通过结合这两种技术可以实现这一点。
- PWM——控制速度
- H 桥– 控制旋转方向
让我们详细了解这些技术。
控制双极步进电机,例如 NEMA 17。如果您想了解更多信息,请查看本教程。
PWM——控制速度
直流电机的速度可以通过改变其输入电压来控制。实现此目的的一种广泛使用的技术是脉冲宽度调制 (PWM)。
PWM 是一种通过发送一系列开关脉冲来调整输入电压平均值的技术。该平均电压与脉冲宽度成正比,称为占空比。
占空比越高,施加到直流电机的平均电压就越高,从而导致电机速度增加。占空比越短,施加到直流电机的平均电压就越低,导致电机速度降低。
下图显示了具有各种占空比和平均电压的 PWM 技术。
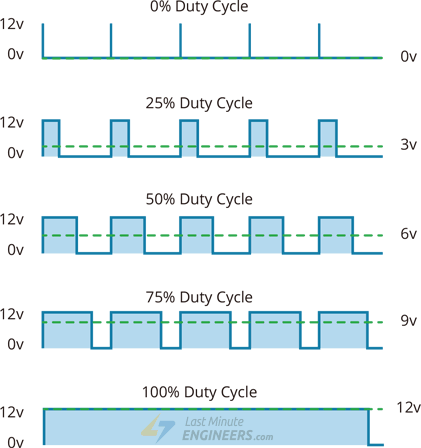
脉宽调制(PWM)技术
H 桥 – 控制旋转方向
直流电机的旋转方向可以通过改变其输入电压的极性来控制。实现此目的的一种广泛使用的技术是使用 H 桥。
H桥电路由排列成H形的四个开关组成,电机位于中心。
同时闭合两个特定开关会反转施加到电机的电压的极性。这会导致电机旋转方向发生变化。
下面的动画显示了 H 桥电路的工作情况。
H桥的工作
L298N电机驱动芯片
模块的中心是一个带有厚实散热器的黑色大芯片——L298N。
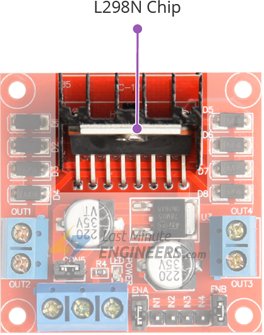
L298N 芯片包含两个标准 H 桥,能够驱动一对直流电机,非常适合构建两轮机器人平台。
L298N 电机驱动器的电源范围为 5V 至 35V,每通道能够提供 2A 连续电流,因此它与我们的大多数直流电机配合得很好。
技术规格
以下是规格:
| 电机输出电压 | 5V – 35V |
| 电机输出电压(推荐) | 7V – 12V |
| 逻辑输入电压 | 5V – 7V |
| 每通道连续电流 | 2A |
| 最大功耗 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1545
1545






 到【灌水乐园】发言
到【灌水乐园】发言







