







 本文详细介绍了遥感图像的几何校正过程,包括MODIS、ASAR和基于GLT方法的国产卫星影像的校正步骤。通过ENVI软件,利用自带的地理定位信息或GLT文件,进行系统性和非系统性几何形变的消除,确保图像与地图投影系统的匹配。针对不同数据类型,如MODIS的大气表观反射率数据和ASAR数据,采用特定的校正模型和参数设置,实现高精度的几何校正。
本文详细介绍了遥感图像的几何校正过程,包括MODIS、ASAR和基于GLT方法的国产卫星影像的校正步骤。通过ENVI软件,利用自带的地理定位信息或GLT文件,进行系统性和非系统性几何形变的消除,确保图像与地图投影系统的匹配。针对不同数据类型,如MODIS的大气表观反射率数据和ASAR数据,采用特定的校正模型和参数设置,实现高精度的几何校正。
2.基于自带定位信息的几何校正
2.1 内容介绍
图像的几何形变一般分为两大类:系统性和非系统性。系统性几何形变一般是由传感器本身引起的,有规律可循、具有可预测性,可以用传感器模型来校正,卫星地面接收站已经完成了这项工作;非系统性几何形变是不规律的,引起它的缘由可以是传感器平台本身的高度、姿势等,也可以是地球曲率及空气折射的变化、地形变化等。常说的几何校正,就是要消除这些非系统性几何形变。几何校正,是利用地面控制点和几何校正数学模型来矫正非系统性因素产生的误差,将图像投影到平面上使其符合地图投影系统的过程。由于校正过程中会将坐标系统赋予图像数据,所以此过程包括了地理编码(geo-coding)。不同的数据需要使用不同的几何校正方法,对于重返周期短、空间分辨率较低的卫星数据,如AVHRR、MODIS、SeaWiFS等,地面控制点的选择有相当的难度。这时,可以利用卫星传感器自带的地理定位文件进行几何校正,校正精度主要受地理定位文件的影响。
2.2详细操作步骤
2.2.1 MODIS数据几何校正
第一步:打开数据文件,选择主菜单File > Open AS> EOS> MODIS,选择文件打开,这个是1000米分辨率的数据(1KM)。ENVI自动的提取相关的数据集,包括地理参考信息,数据质量波段等信息,并自动将MODIS数据定标为两部分数据——大气表观反射率、发射率和辐射率,如图2.1.1和图2.1.2
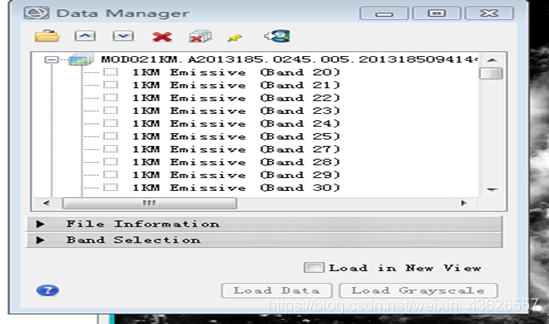
图2.1.1 数据管理
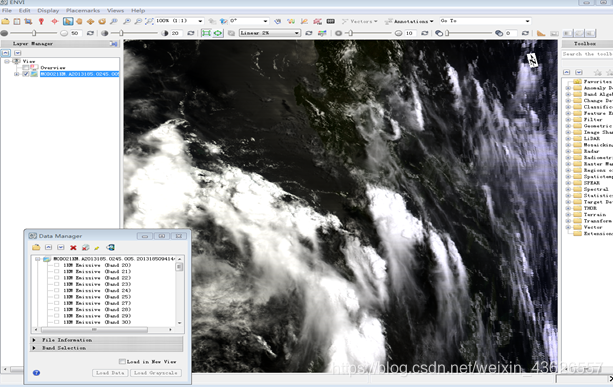
图2.1.2 打开MODIS L1B数据后Data Manager面板
第二步:选择校正模型
在Toolbox 中,打开Geometric Correction /Georeference by Sensor/Georeference MODIS,在Input MODIS File对话框中选择相应的数据集,可在右边列表中查看文件信息。这里选择大气表观反射率数据(Reflectance),单击OK进入下一步Georeference MODIS Parameters对话框,如图2.2.1。
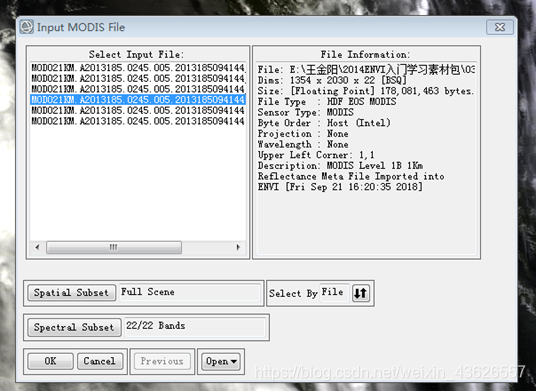
图2.1.3 Input MODIS File对话框
第三步:设置输出参数
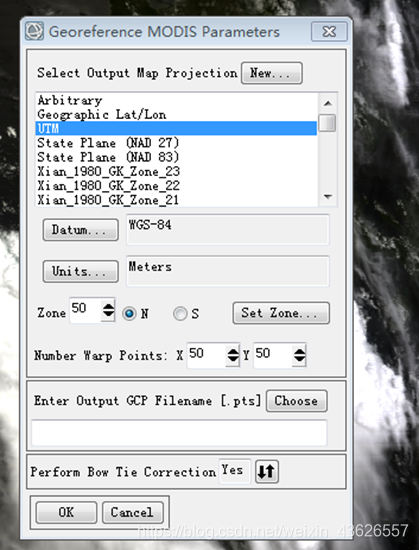
(1) 在Georeference MODIS Parameters面板中,设置输出坐标系。这里设置UTM/WGS84坐标系。
(2) 在Number Warp Points: X and Y fields中,键入X、Y方向校正点的数量。在X方向的校正点数量应该小于等于51个,在Y方向的校正点数量应该小于等于行数。
注:Georeference工具主要思想是利用数据中提供的经纬度数据自动生成一系列的控制点,如这里的50x50个控制点。
(3) 可以将校正点导出成控制点文件(.pts),这里不输出。
(4) Perform Bow Tie Correction选项是用来消除MODIS的“蝴蝶效应”的,默认是选择Yes。
(5) 单击OK进入校正参数面板(Registration Parameters)。
(6) 在Registration Parameters面板中,系统自动计算起始点的坐标值、像元大小、图像行列数据,可以根据要求更改。Background值设置0,选择路径和文件名输出。
(7)单击OK开始校正MODIS数据如图2.1.5。
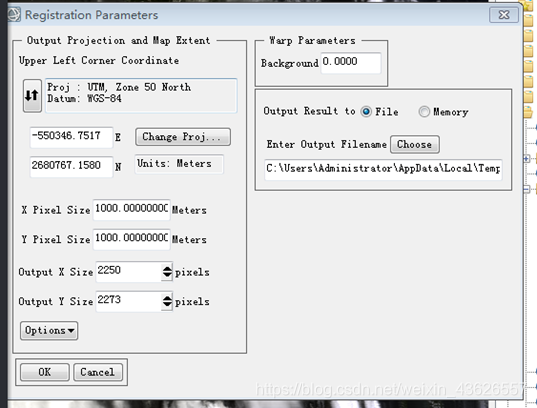
图2.1.5 校正配置
如下图2.1.6为校正结果,由于选择的是UTM坐标系,两边有一定范围的裁剪,如果要得到完整的图像,可以在Registration Parameters面板中手动将输出列大小交换机OutputX Size数字设置大一些。
图2.1.6 校正结果
2.2.2 ASAR数据几何校正
第一步:打开数据文件
选择主菜单File > Open As> ENVISAT> ASAR,打开数据文件: ASA_IMP_1PNDPA20040429_ 034506_000000162026_00233_11309_0457.N1。
第二步:选择校正模型
在Toolbox中,选择GeometricCorrection> Georeference by Sensor> Georeference ASAR。在Select ENVISAT File对话框中选择文件如图2.2.1,单击OK打开Select Out Projection对话框。
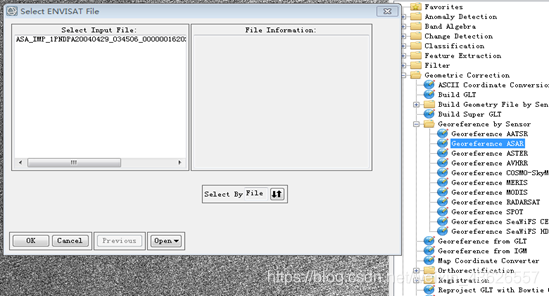
图2.2.1 选择文件
第三步:设置输出参数
(1) 在Select Out Projection对话框中,设置输出文件的投影参数。选择Geographic Lat/Lon坐标类型,Rotate and Transpose if Descending:No(该数据为升轨),单击OK打开Registration Parameters对话框如图2.2.2。
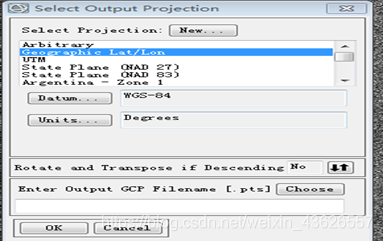
图2.2.2 Select Out Projection对话框
(2) 在Registration Parameters对话框中,单击Choose按钮,选择文件输出路径及文件名。其他主要主要参数:
校正方法(Method):Triangulation 重采样方法(Resampling):Cubic Convolution
(3) 单击OK按钮执行校正。
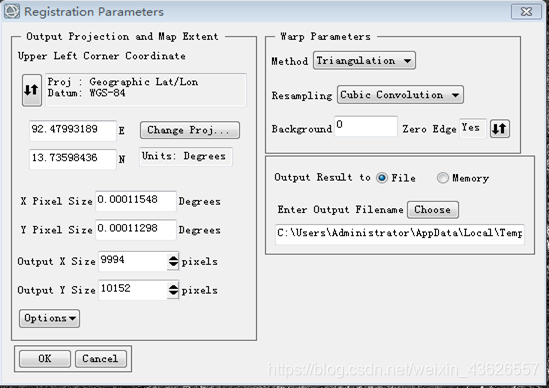
图2.2.3 Registration Parameters对话框
第四步:查看/验证结果校正结果有了Map Info信息。
在Toolbox中,打开SPEAR/SPEAR Google Earth Bridge,利用流程化工具将校正结果叠加到Google Earth中显示,可以看到结果和Google Earth中的底图基本吻合。
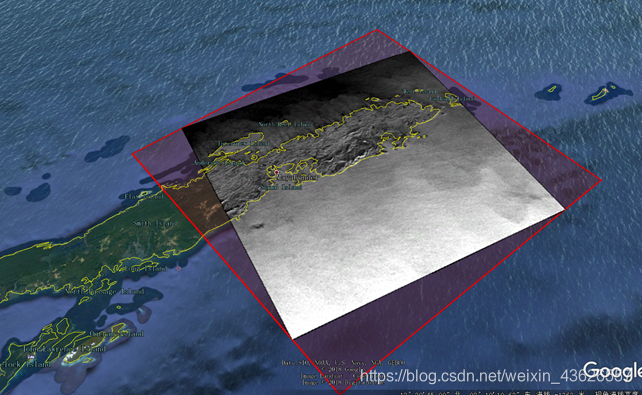
图2.2.4 在Google Earth中显示结果
2.2.3 基于GLT方法的国产卫星影像几何校正
GLT几何校正法利用输入的几何文件生成一个地理位置查找表文件(geographic lookup table,GLT),从该文件中可以了解到某个初始像元在最终输出结果中实际的地理位置。地理位置查找表文件是一个二维图像文件,文件中所包含两个波段:地理校正影像的行和列,文件对应的灰度值表示原始影像每个像素对应的地理位置坐标信息,用有符号整型储存,它的符号说明输出像元是对应于真实的输入像元,是由邻近像元生成的填实像元(infill pixel)。符号为正时说明使用了真实的像元位置值;符号为负时说明使用了邻近像元的位置值,值为0说明周围7个象元内没有邻近像元位置值。GLT文件包含初始影像每个像元的地理定位信息,它的校正精度很高。避免了通过地面控制点利用二次多项式几何校正法对低分辨率影像数据的处理。
第一步:打开数据文件
(1) File > Open,选择文件后缀是.he5的文件,进入Select HDF5 Datasets面板,如下图所示。
注:风云三号卫星影像是以HDF5格式储存,但是后缀名还是.hdf,因此手动改成.he5。
(2) 文件中包含很多信息,选择图像数据EV_RefSB,点击中间的加载箭头,将所选数据加载到右边的列表中,单击右下角Open Rasters,打开图像。
(3) 相同方法,同时将定位文件(Latitude和Longitude)打开。如图2.2.5
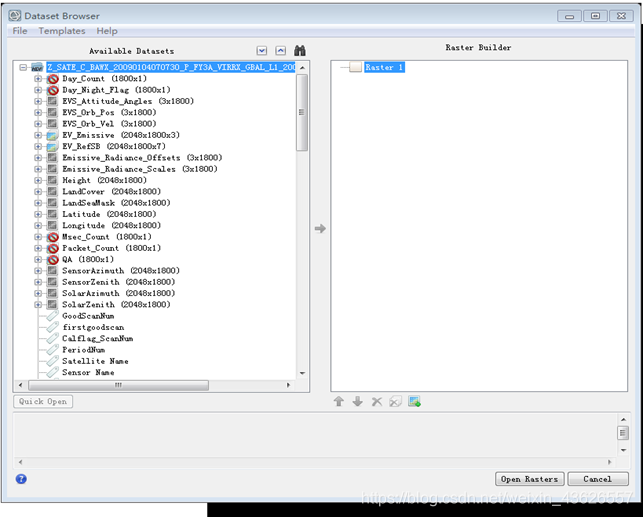
图2.2.5 打开定位文件
第二步:生成GLT文件
(1) 在Toolbox中,选择/Geometric Correction/Build GLT。
(2) 在弹出的对话框中,Input XGeometry Band选择经度longitude信息文件,Input Y Geometry选择纬度latitude信息文件。在接下来弹出的对话框中填写输出GLT文件的投影信息,这里选择Geographic Lat/Lon,WGS-84,如下图2.2.6所示。
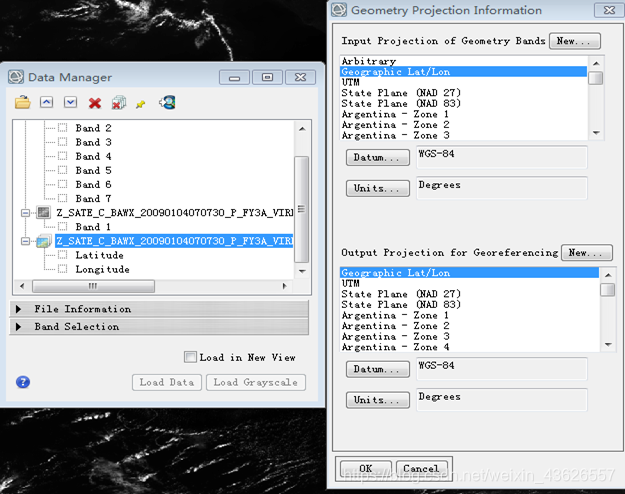
图2.2.6 填写GLT投影参数
(3) 在Build Geometry Lookup File Parameters面板中,填写GLT输出参数,像元大小选择默认,旋转角度(Rotation)为0(正上方为北),选择保存路径和文件名输出如图2.2.7。
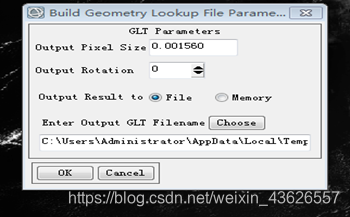
图2.2.7 Build Geometry Lookup File Parameters面板
第三步:利用GLT文件几何校正影像
(1) 在Toolbox中,选择/Geometric Correction/Georeference from GLT,在弹出的Input Geometry Lookup File对话框中选择GLT文件,在Input Data File对话框中选择待校正文件。
注:由于从HDF5数据集中打开的文件名称都一样,可通过左边的File Information来判断选择的文件。
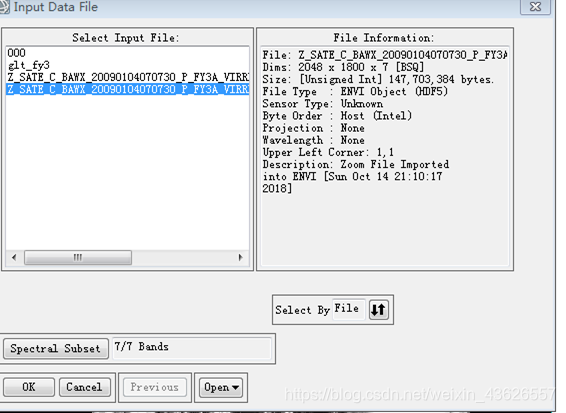
图2.2.8 利用GLT文件几何校正时数据输入
(2) 选择输出路径和文件名,如下图所示。
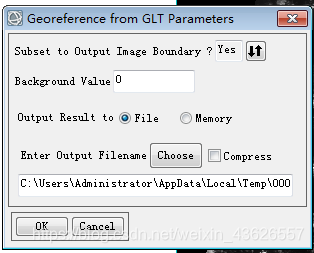
图2.2.9 校正文件输出
第四步:浏览结果
如下图2.2.10为几何校正结果。
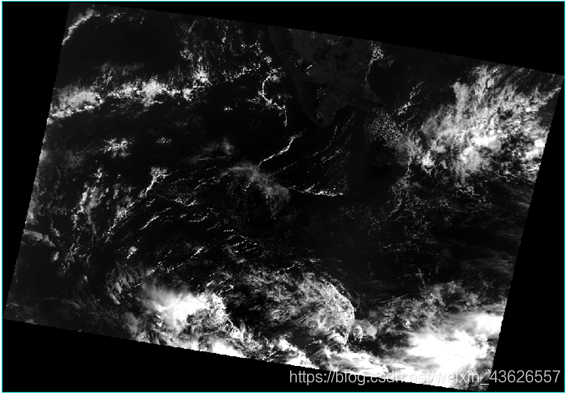
利用ENVI下的Google Earth Bridge功能,将校正结果在Google Earth下叠加显示,可以看到校正结果和Google Earth完全重合。如下图2.2.11所示。
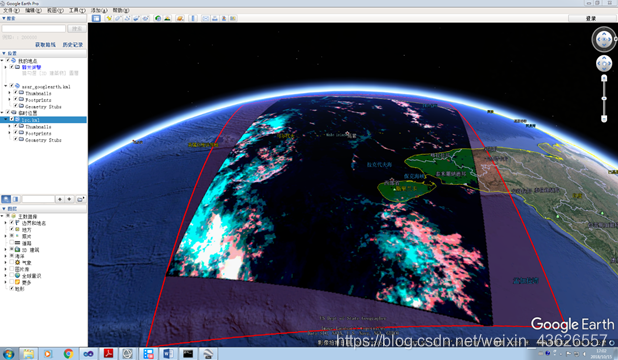
图2.2.11 GLT校正结果与Google Earth叠加显示

















 5082
5082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









