






FX3U和三菱伺服控制的框架标准程序,适合新手学习定位用。
用 标签分层,说明了定位控制中的公共参数设定、回原点、JOG手动、绝对定位、相对定位、控制等部分,有伺服驱动器的针脚接线。
‘包括有:
1、程序一份
2、说明一份
ID:298683823238797
笑笑百货特卖
FX3U和三菱伺服控制的框架标准程序对于新手学习定位控制非常适用。它采用了标签分层的方式,清晰地说明了定位控制中的公共参数设定、回原点、JOG手动、绝对定位、相对定位和控制等部分,还包括有伺服驱动器的针脚接线。
在定位控制中,公共参数设定是非常重要的一部分。它涵盖了一系列常用的参数设置,如速度、加速度、减速度以及相关的操作模式。通过合理的参数设定,可以使伺服系统在定位控制过程中达到更高的精度和稳定性。
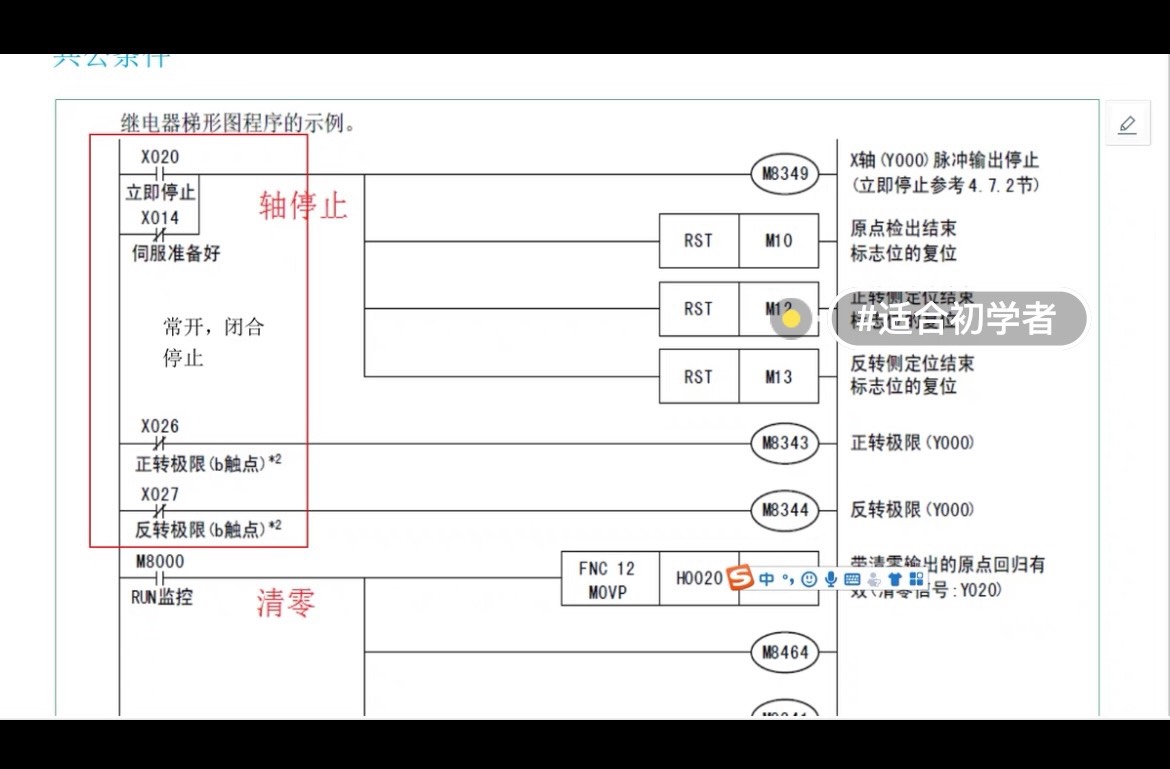
回原点是定位控制中常见的操作之一。在开始一次新的定位控制之前,通常需要将伺服系统回到初始位置,以保证后续的定位准确性。框架标准程序中详细介绍了回原点的流程和相关的指令,对于新手来说非常有用。
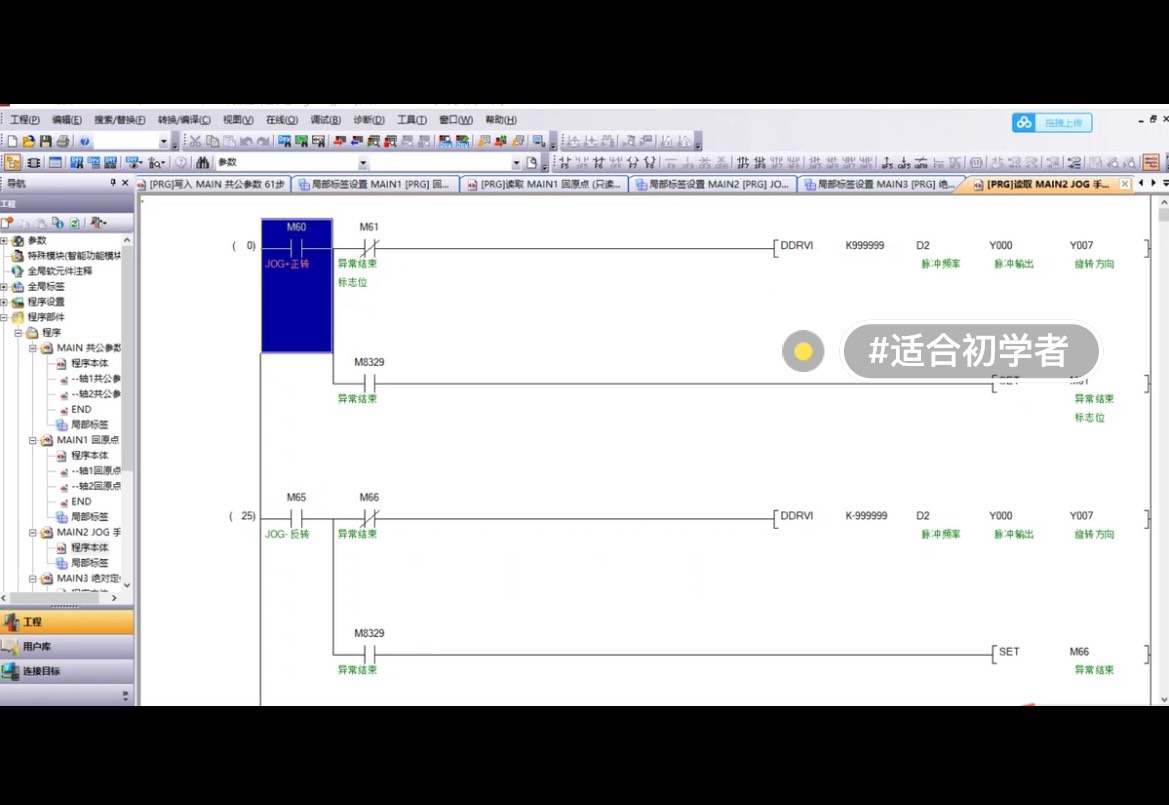
JOG手动是一种手动控制模式,可以通过外部设备或者面板上的按钮来控制伺服系统的运动。框架标准程序中提供了相应的指令和示例代码,帮助新手了解和掌握这一重要的操作方式。
绝对定位和相对定位是定位控制中常见的两种方式。绝对定位是指将伺服系统精确定位到指定的位置,而相对定位是指在当前位置的基础上进行相对的位移。框架标准程序中通过详细的说明和示例代码,帮助新手理解和应用这两种定位方式。
控制是定位控制的核心部分。框架标准程序中提供了多种常用的控制指令和函数,如位置控制、速度控制、力矩控制等。通过这些指令和函数,新手可以实现对伺服系统的精确控制,满足不同应用场景的需求。
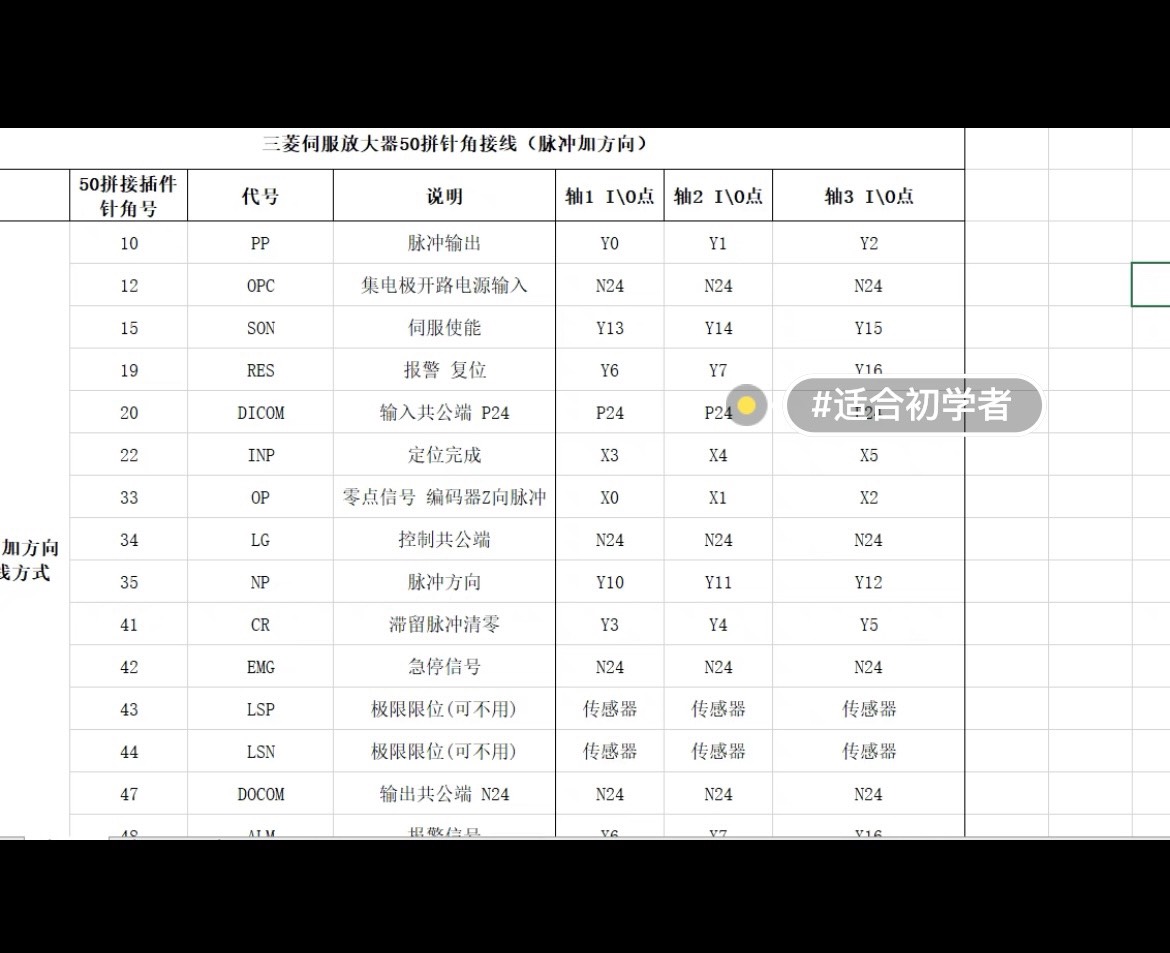
除了上述的内容,框架标准程序还包括有伺服驱动器的针脚接线。对于新手来说,了解并正确连接伺服驱动器的针脚非常重要,这关系到整个系统的正常运行。
总之,FX3U和三菱伺服控制的框架标准程序是一份很好的学习资源,特别适合新手学习定位控制。它的结构清晰,内容丰富,涵盖了定位控制中的多个重要部分,帮助新手理解和掌握伺服控制的基本原理和操作方法。无论是想了解定位控制的基础知识还是希望深入学习伺服控制的高级技术,这份框架标准程序都是一个很好的起点。希望通过阅读和实践,新手可以快速掌握定位控制的关键技术,并在实际应用中取得良好的效果。
相关的代码,程序地址如下:http://fansik.cn/683823238797.html


















 6360
6360

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









