






定积分
定义
定积分是微积分中的一个重要概念,用于求解函数在某个区间上的累积效应或面积。

表示函数 f(x)在区间 [a,b]上的累积效应或面积。定积分的定义可以通过以下步骤来理解
分割区间: 将区间 [a,b]分割成 n 个小区间,每个小区间的长度为 Δxi,其中
![]()
且 x0=a,xn=b。
取样本点: 在每个小区间
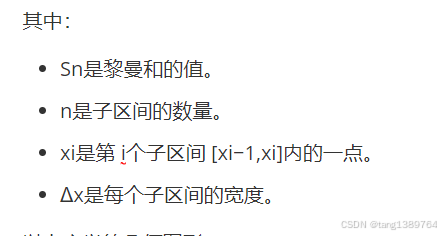
构造黎曼和: 构造黎曼和
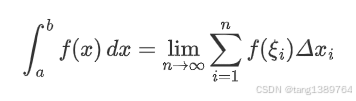
取极限: 当分割的区间数 n 趋向于无穷大,且每个小区间的长度 Δxi趋向于零时,黎曼和的极限即为定积分:
说明:
黎曼和是通过将区间 [a,b]分成 n 个等宽的子区间,每个子区间的宽度为
然后选择每个子区间内的一点 xi,计算矩形的面积之和来近似积分的。
黎曼和可以表示为:
几何意义
定积分
的几何意义是函数 f(x) 在区间 [a,b]上的曲线下面积。具体来说:
如果 f(x)≥0,则定积分表示曲线下方的面积。
如果 f(x)≤0,则定积分表示曲线上方的面积的负值。
性质
定积分具有以下重要性质:根据这些性质可在不同定积分中进行计算
线性性质:

其中 c 和 d 是常数。
区间可加性:
积分上下限交换:
定积分中值定理:
如果函数 f(x) 在闭区间 [a,b] 上连续,则存在 c∈[a,b],使得: 
微积分基本公式
牛顿-莱布尼茨公式:
其中,F(x)是 f(x)的一个原函数,即 F′(x)=f(x)。
微积分基本定理:
微积分基本定理分为两部分,分别描述了积分上限函数的性质和定积分的基本公式。
第一部分(Part 1)
如果 f(t) 在区间 [a,b]上连续,则积分上限函数

在区间 [a,b] 上可导,并且其导数为:
第一基本定理表明不定积分是微分的逆运算,保证了某连续函数的原函数的存在性。
第二部分(Part 2)
如果 F(x)是 f(x)的一个原函数,即 F′(x)=f(x),则:
第二基本定理则提供了定积分和不定积分之间的联系,使得定积分的计算变得简便。
定积分换元法
步骤
1.选择合适的变量替换: 选择一个合适的变量替换 t=g(x),使得积分变得更简单,并求反函数:
2.求导数: 对 x 的导数
3.替换积分变量: 将原积分中的 x 替换为 t,并将 dx 替换为
4.确定新的积分上下限: 将原积分的上下限 a 和 b 替换为新的上下限 t 的值。即 t 的下限为 t1,上限为 t2。
5.求解新积分: 求解新的定积分
多元函数
二元极限
几何意义:
当点 (x,y)从任意方式趋近于点 (a,b) 时,函数 f(x,y) 的值趋近于 L。换句话说,函数图像在二维平面的点 (a,b)附近趋近于一个三维立体平面上的点 (a,b,L)。可将(a,b)想象为(a,b,L)投影在二维平面的点。
如果 (x,y)从不同方式趋近于点 (a,b),函数 f(x,y) 的值不相等,则表示 f(x,y) 不存在。
偏导数
偏导数是多元函数求导的一种形式,表示在多个自变量中,当其中一个自变量改变而其他自变量保持不变时函数值的变化率。
这实质上是将其他自变量视为常数,然后按照单变量函数求导的方法进行运算。
偏导数的计算方法
对于二元函数z=f(x,y),求z对x的偏导数时,将y看作常量,对x求导;求z对y的偏导数时,将x看作常量,对y求导。
全微分
可微的必要条件条件
若z=f(x,y)在(x,y)点处可微,则偏导数
 存在。且
存在。且
![]()
可微的充分条件
z=f(x,y)在(x,y)的某个邻域内有连续的偏导数。
全微分的计算:
将函数在某点处,求出x的偏导数和y的偏导数,之后相加可得全微分。
近似计算
z=f(x, y)在点(x, y)处的全增量为

全微分为
在计算中我们通常使
所以


梯度
梯度是一个向量,表示多元函数在某一点处的最大变化率和变化方向。
性质
最大变化率:梯度 ∇f(a) 的方向是函数 f在点 a 处变化率最大的方向。
变化率:梯度 ∇f(a) 的大小(模)是函数 f 在点 a 处沿梯度方向的变化率。
沿梯度方向是是函数 f在点 a 处变化率增加最大的方向;沿梯度反方向是是函数 f在点 a 处变化率减小最大的方向;沿梯度垂直方向函数 f在点 a 处变化率为0。
梯度下降
梯度下降是一种优化算法,用于寻找多元函数的最小值。其基本思想是沿着函数的负梯度方向逐步更新参数,以减少函数值。
算法步骤
初始化:选择一个初始点 x0。
迭代更新:对于每次迭代 k,计算当前点的梯度

,并更新参数:
其中,η 是学习率(步长),控制每次更新的步幅。
终止条件:当梯度的模足够小或达到预设的迭代次数时,停止迭代。通常,终止条件可以是以下几种:
梯度的模足够小:当梯度的模(或范数)
小于某个阈值时,停止迭代。
说明:
梯度的范数表示梯度向量的大小,即梯度向量的长度。
梯度的范数(模) ∥∇f(xk)∥是这个向量的欧几里得长度,定义为:

达到预设的迭代次数:当迭代次数达到预设的最大迭代次数时,停止迭代。
函数值变化足够小:当函数值的变化
小于某个阈值时,停止迭代。
学习率
学习率 η是一个重要的超参数,控制着每次更新的步幅。选择合适的学习率对于梯度下降算法的性能至关重要:
学习率过大:如果步幅过大,算法可能会“跳过”最优解,导致在最优解附近来回震荡。
学习率过小:可能导致算法收敛速度过慢。
二重积分
二重积分是多元微积分中的一个重要概念,用于计算二维区域上的函数积分。它通常用于计算平面区域上的面积、质量、重心等问题。二重积分的基本思想是将一个二维区域分割成无数个小区域,然后在每个小区域上计算函数值的积分。
几何意义:
表示以 D 为底、以 f(x,y)为顶的曲顶柱体的体积。
二重积分的计算步骤-直角坐标系
在直角坐标系下,二重积分可以表示为两个定积分的乘积:
其中 D 是由 x=a 到 x=b 以及 y=g(x)到 y=h(x) 围成的区域。
1.确定积分区域 D:首先,你需要确定积分区域 D的边界。这个区域可以是矩形、圆形、多边形等。
2.设置积分限:根据积分区域 D,设置积分的限。例如,对于直角坐标系中的矩形区域,积分限通常是 a≤x≤b 和 c≤y≤d。
3.写出积分表达式:根据积分限写出二重积分的表达式:

4.计算内层积分:先对 y 进行积分,得到关于 x 的表达式。
5.计算外层积分:再对 x 进行积分,得到最终的积分值。
二重积分的计算步骤-极坐标系
极坐标系的二重积分计算步骤同直角坐标系,不同的是需要将直角坐标系的坐标转换为极坐标。
极坐标系的基本概念
原点:极坐标系的原点称为极点(通常记作 O)。
极径:从极点到某一点的距离称为径向距离(通常记作 r)。
极角:从极点到某一点的射线与极轴(通常是正 xx 轴)之间的角度称为极角(通常记作 θ)。
给定点的极坐标 (r,θ),可以转换为直角坐标 (x,y):
在极坐标下,二重积分的表达式为:
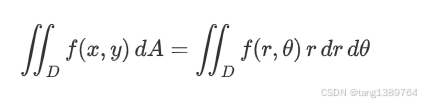
其中 r 和 θ 分别是极径和极角。
注意:转换为极坐标系的二重积分中需要多加一个r ,这个最容易忘记。

















 2772
2772

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









