









 本文详细解析了CloudCompare中的Octree算法,涉及预计算位移值、cell codes结构、层级划分和cellPos编码。理解了如何通过这些结构快速定位和索引点云数据,提升计算性能。
本文详细解析了CloudCompare中的Octree算法,涉及预计算位移值、cell codes结构、层级划分和cellPos编码。理解了如何通过这些结构快速定位和索引点云数据,提升计算性能。
官方参考地址:CloudCompare octree - CloudCompareWiki
CC的octree算法主要体现在DgmOctree.h和DgmOctree.cpp中,他采用了一种分级的结构,最大支持21级,如下,
static const int MAX_OCTREE_LEVEL = 21;然后,会事先计算得到一个分级表,
预先计算好的数据表
CC这么做的原因是,把事先能计算好的数据先存储起来,用空间换时间的办法,来加速运算速度。
(1) PRE_COMPUTED_BIT_SHIFT_VALUES
//! Pre-computed bit shift values (one for each level)
struct BitShiftValues
{
//! Default initialization
BitShiftValues()
{
//we compute all possible values
for (unsigned char level = 0; level <= DgmOctree::MAX_OCTREE_LEVEL; ++level)
{
values[level] = (3 * (DgmOctree::MAX_OCTREE_LEVEL - level));
}
}
//! Values
unsigned char values[DgmOctree::MAX_OCTREE_LEVEL+1];
};
static BitShiftValues PRE_COMPUTED_BIT_SHIFT_VALUES;
unsigned char DgmOctree::GET_BIT_SHIFT(unsigned char level)
{
//return (3 * (DgmOctree::MAX_OCTREE_LEVEL - level));
return PRE_COMPUTED_BIT_SHIFT_VALUES.values[level];
}所以这个value实际相当于这样一个表,
[0] 63
[1] 60
[2] 57
[3] 54
[4] 51
[5] 48
[6] 45
[7] 42
[8] 39
[9] 36
[10] 33
[11] 30
[12] 27
[13] 24
[14] 21
[15] 18
[16] 15
[17] 12
[18] 9
[19] 6
[20] 3
[21] 0(2) PRE_COMPUTED_POS_CODES
static const int MAX_OCTREE_LENGTH = (1 << MAX_OCTREE_LEVEL);
//! Pre-computed cell codes for all potential cell positions (along a unique dimension)
struct MonoDimensionalCellCodes
{
//! Total number of positions/values
/** There are 1024 possible values at level 10, and 2M. at level 21.
\warning Never pass a 'constant initializer' by reference
**/
static const int VALUE_COUNT = DgmOctree::MAX_OCTREE_LENGTH;
//! Default initialization
MonoDimensionalCellCodes()
{
//we compute all possible values for cell codes
//(along a unique dimension, the other ones are just shifted)
for (int value = 0; value < VALUE_COUNT; ++value)
{
int mask = VALUE_COUNT;
DgmOctree::CellCode code = 0;
for (unsigned char k = 0; k < DgmOctree::MAX_OCTREE_LEVEL; k++)
{
mask >>= 1;
code <<= 3;
if (value & mask)
{
code |= 1;
}
}
values[value] = code;
}
//we compute all possible masks as well! (all dimensions)
//DgmOctree::CellCode baseMask = (1 << (3 * DgmOctree::MAX_OCTREE_LEVEL));
//for (int level = DgmOctree::MAX_OCTREE_LEVEL; level >= 0; --level)
//{
// masks[level] = baseMask - 1;
// baseMask >>= 3;
//}
}
//! Mono-dimensional cell codes
DgmOctree::CellCode values[VALUE_COUNT];
//! Mono-dimensional cell masks
//DgmOctree::CellCode masks[DgmOctree::MAX_OCTREE_LEVEL + 1];
};
static MonoDimensionalCellCodes PRE_COMPUTED_POS_CODES;这里,MAX_OCTREE_LENGTH == (1<<21) == 2097152 == 0x200000 ,是一个位置的极限值,这个表实际上相当于,
[0] 0
[1] 1
[2] 8
[3] 9
[4] 64
[5] 65
[6] 72
[7] 73
[8] 512
[9] 513
[10] 520
[11] 521
[12] 576
[13] 577
[14] 584
[15] 585
[16] 4096
[17] 4097
[18] 4104
[19] 4105
[20] 4160
[21] 4161
[22] 4168
[23] 4169
[24] 4608
[25] 4609
[26] 4616
[27] 4617
[28] 4672
[29] 4673
[30] 4680
[31] 4681
......计算基础之cellCode
在设计算法之前,我们需要了解一下OcTree层级的概念。
比如我的所有点都在一个64x64x64的立方体内,那第0层级的边长就是64,也就是最大的cube框的边长,那么一个立方体包含8个cube框,下一级第1层级框的边长大小就是64/2,依此类推,再下一级就是64/4,64/8......
另外,给一个相关讲解的参考地址,
参考:数据立方体_点云空间数据组织——八叉树-白红宇的个人博客
作者对八叉树进行了讲解,我摘录了其中的一点。如下,
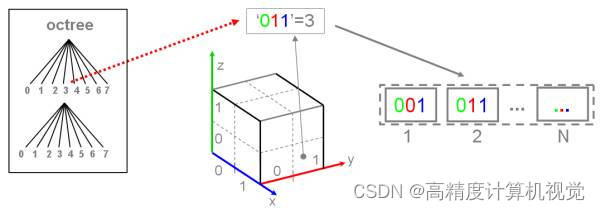
八叉树将空间分割成八块,根据2进制, 3位2进制即可表示8个数字,3位中的顺序:zyx ,顺序区分,从小递增到大,如: 011,即z为0,x为1,y为 1的块位置。所以 64位操作系统最多可分割为64/3 = 21级, 32位操作系统最多可分割为32/3 = 10级。
建立单维索引( CellCode)
将原有的1位2进制转为3位,如:001转为000 000 001,010 转为 000 001 000,以此类推。另外两个维度的code分别左移1位和2位即可。
软件初始化时就计算完了所有CellCode。
具体可参考前面讲到的结构体static MonoDimensionalCellCodes PRE_COMPUTED_POS_CODES;
好了,前面的这个要怎么理解和使用呢?
比如,我计算得到cellPos=(2,2,2),那
PRE_COMPUTED_POS_CODES.values[2] == 8 == 000 001 000
假设对应的层级也是21,那么,GenerateTruncatedCellCode中,返回的数据结果就是
return (
PRE_COMPUTED_POS_CODES.values[cellPos.x << shift]
| (PRE_COMPUTED_POS_CODES.values[cellPos.y << shift] << 1)
| (PRE_COMPUTED_POS_CODES.values[cellPos.z << shift] << 2)
) >> GET_BIT_SHIFT(level);具体可以参考DgmOctree::GenerateTruncatedCellCode函数。
也就是
000 001 000 | 000 001 000 << 1 | 000 001 000 << 2 == 000 111 000
再比如,我计算得到cellPos=(3,3,3),那
PRE_COMPUTED_POS_CODES.values[3] == 9 == 000 001 001
那么,在21级,相应的cellcode就是
000 001 001 | 000 001 001 << 1 | 000 001 001 << 2 == 000 111 111
又比如,我计算得到cellPos=(4,4,4),那
PRE_COMPUTED_POS_CODES.values[3] == 64 == 001 000 000
那么,在21级,相应的cellcode就是
001 000 000 | 001 000 000 << 1 | 001 000 000 << 2 == 111 000 000
看出规律了吗?
作者的意思,就是要设计一个像c++中std::map这样的一个结构,能够迅速通过这个cellCode,找到任意层级的cellPos。
例如,前面在第21层级的cellPos=(4,4,4),到了第20层级,就要右移3位,因为
GET_BIT_SHIFT(20) == 3
不难判断,这个cellCode对应的cellPos正是(2,2,2)。
好了,有了这些相关基础知识之后, 我们开始讲解点云的八叉树算法的架构与原理。
ccPointCloud : ccGenericPointCloud
class QCC_DB_LIB_API ccPointCloud : public CCCoreLib::PointCloudTpl<ccGenericPointCloud, QString>
{
}这里,ccGenericPointCloud的父类是GenericIndexedCloudPersist
class QCC_DB_LIB_API ccGenericPointCloud : public ccShiftedObject, public CCCoreLib::GenericIndexedCloudPersist
{
friend class ccMesh;这是一个纯虚类,GenericIndexedCloudPersist,其所有的上级父类也都是纯虚类,或者说是接口,包括GenericIndexedCloud,GenericIndexedCloud, 以及GenericCloud,
class CC_CORE_LIB_API GenericIndexedCloudPersist : virtual public GenericIndexedCloud
{
......
}
class CC_CORE_LIB_API GenericIndexedCloud : virtual public GenericCloud {
......
}
class CC_CORE_LIB_API GenericCloud{
......
}计算过程(程序结构)
当在CloudCompare中按下Edit-->Octree-->Compute之后,就会启动ocTree的计算,
void MainWindow::doActionComputeOctree()
{
if ( !ccEntityAction::computeOctree(m_selectedEntities, this) )
return;
refreshAll();
updateUI();
}computeOctree会对所有选中的实际进行计算,在该函数中,先是得到entity的点云clouds,然后逐个对其进行计算,octree = cloud->computeOctree(..),或者直接生成octree = ccOctree::Shared(new ccOctree(cloud)),
bool computeOctree(const ccHObject::Container &selectedEntities, QWidget* parent)
{
for (ccHObject* ent : selectedEntities)
{
......
ccGenericPointCloud* cloud = ccHObjectCaster::ToGenericPointCloud(ent, &lockedVertices);
......
clouds.insert(cloud);
......
}
.......
for (const auto cloud : clouds)
{
......
switch (coDlg.getMode())
{
case ccComputeOctreeDlg::DEFAULT:
octree = cloud->computeOctree(&pDlg);
break;
case ccComputeOctreeDlg::MIN_CELL_SIZE:
case ccComputeOctreeDlg::CUSTOM_BBOX:
{
......
octree = ccOctree::Shared(new ccOctree(cloud));
......
}
break;
}
}
......
}接下,调用ccGenericPointCloud::computeOctree,
ccOctree::Shared ccGenericPointCloud::computeOctree(CCCoreLib::GenericProgressCallback* progressCb, bool autoAddChild/*=true*/)
{
deleteOctree();
ccOctree::Shared octree = ccOctree::Shared(new ccOctree(this));
if (octree->build(progressCb) > 0)
{
setOctree(octree, autoAddChild);
}
else
{
octree.clear();
}
return octree;
}在这里面,会先new出一个ccOcTree,并把this也就是ccGenericPointCloud传入进去给m_theAssociatedCloud,然后通过build进行octree的计算,
int DgmOctree::build(GenericProgressCallback* progressCb)
{
if (!m_theAssociatedCloud)
{
assert(false);
return -1;
}
if (!m_thePointsAndTheirCellCodes.empty())
{
clear();
}
m_theAssociatedCloud->getBoundingBox(m_pointsMin, m_pointsMax);
m_dimMin = m_pointsMin;
m_dimMax = m_pointsMax;
//we make this bounding-box cubical (+0.1% growth to avoid round-off issues when projecting points in the octree)
CCMiscTools::MakeMinAndMaxCubical(m_dimMin, m_dimMax, 0.001);
return genericBuild(progressCb);
}这里要注意,ccOctree的父类正是DgmOctree,
class QCC_DB_LIB_API ccOctree : public QObject, public CCCoreLib::DgmOctree计算OcTree
结构体IndexAndCode中,给出的是点的index和所在的cube的code,大体上是这样定义的,
struct IndexAndCode
{
//! index
unsigned theIndex;
//! cell code
CellCode theCode;
......
}
using cellsContainer = std::vector<IndexAndCode>;
//! The coded octree structure
cellsContainer m_thePointsAndTheirCellCodes;接下来我们看一下DgmOctree::genericBuild函数的主体,
int DgmOctree::genericBuild(GenericProgressCallback* progressCb)
{
......
try
{
m_thePointsAndTheirCellCodes.resize(pointCount);
}
......
updateCellSizeTable();
//for all points
cellsContainer::iterator it = m_thePointsAndTheirCellCodes.begin();
for (unsigned i = 0; i < pointCount; i++)
{
const CCVector3* P = m_theAssociatedCloud->getPoint(i);
//does the point falls in the 'accepted points' box?
//(potentially different from the octree box - see DgmOctree::build)
if ( (P->x >= m_pointsMin[0]) && (P->x <= m_pointsMax[0])
&& (P->y >= m_pointsMin[1]) && (P->y <= m_pointsMax[1])
&& (P->z >= m_pointsMin[2]) && (P->z <= m_pointsMax[2]) )
{
//compute the position of the cell that includes this point
Tuple3i cellPos;
getTheCellPosWhichIncludesThePoint(P, cellPos);
......
it->theIndex = i;
it->theCode = GenerateTruncatedCellCode(cellPos, MAX_OCTREE_LEVEL);
......
++it;
++m_numberOfProjectedPoints;
}
......
//we sort the 'cells' by ascending code order
ParallelSort(m_thePointsAndTheirCellCodes.begin(), m_thePointsAndTheirCellCodes.end(), IndexAndCode::codeComp);
//update the pre-computed 'number of cells per level of subdivision' array
updateCellCountTable();
......
}下面我们来看这个函数是如何计算octree的,
(1) 函数中先是通过m_thePointsAndTheirCellCodes.resize分配内存,
m_thePointsAndTheirCellCodes.resize(pointCount); (2)然后,通过updateCellSizeTable不断分割尺寸,得到每一级cube框的大小,例如,假设最大的框的边长为64,那么一个立方体包含8个cube框,下一级框的边长大小就是64/2,依此类推,再下一级就是64/4,64/8......
void DgmOctree::updateCellSizeTable()
{
//update the cell dimension for each subdivision level
m_cellSize[0] = m_dimMax.x - m_dimMin.x;
unsigned long long d = 1;
for (int k = 1; k <= MAX_OCTREE_LEVEL; k++)
{
d <<= 1;
m_cellSize[k] = m_cellSize[0] / d;
}
}然后,函数开始逐个点逐个点地计算。
(3) 通过getTheCellPosWhichIncludesThePoint计算点的cellPos。这里的cellPos是指最小的cube的序号,和前面的讲解一样,假设0级cell大小是64,那么第20级的cell大小就是cs = 64/2^20 = 0.00006103515625,那么在某个维度上其序号就是(x-xmin)/cs,如下,
//! Type of the coordinates of a (N-D) point
using PointCoordinateType = float;
//! Returns the position FOR THE DEEPEST LEVEL OF SUBDIVISION of the cell that includes a given point
/** The cell coordinates can be negative or greater than 2^MAX_OCTREE_LEVEL-1
as the point can lie outside the octree bounding-box.
\param thePoint the query point
\param cellPos the computed position
**/
inline void getTheCellPosWhichIncludesThePoint(const CCVector3* thePoint, Tuple3i& cellPos) const
{
const PointCoordinateType& cs = getCellSize(MAX_OCTREE_LEVEL);
//DGM: if we admit that cs >= 0, then the 'floor' operator is useless (int cast = truncation)
cellPos.x = static_cast<int>(/*floor*/(thePoint->x - m_dimMin.x) / cs);
cellPos.y = static_cast<int>(/*floor*/(thePoint->y - m_dimMin.y) / cs);
cellPos.z = static_cast<int>(/*floor*/(thePoint->z - m_dimMin.z) / cs);
}(4) 获取点的cellCode,
这个,是我们在基础部分讲过的函数DgmOctree::GenerateTruncatedCellCode,
DgmOctree::CellCode DgmOctree::GenerateTruncatedCellCode(const Tuple3i& cellPos, unsigned char level)
{
assert(cellPos.x >= 0 && cellPos.x < MonoDimensionalCellCodes::VALUE_COUNT
&&cellPos.y >= 0 && cellPos.y < MonoDimensionalCellCodes::VALUE_COUNT
&&cellPos.z >= 0 && cellPos.z < MonoDimensionalCellCodes::VALUE_COUNT);
const unsigned char shift = MAX_OCTREE_LEVEL - level;
return(PRE_COMPUTED_POS_CODES.values[cellPos.x << shift]
|(PRE_COMPUTED_POS_CODES.values[cellPos.y << shift] << 1)
|(PRE_COMPUTED_POS_CODES.values[cellPos.z << shift] << 2)
) >> GET_BIT_SHIFT(level);
}(5)按cellCode大小排序
ParallelSort(m_thePointsAndTheirCellCodes.begin(), m_thePointsAndTheirCellCodes.end(), IndexAndCode::codeComp);
值得说明的是,在函数中,对变量m_fillIndexes也进行了计算,因为源码比较简单,一目了然,这里就不展开讲了。
本文结束。


















 554
554

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









