






西门子S7-1200控制四轴伺服程序案例:
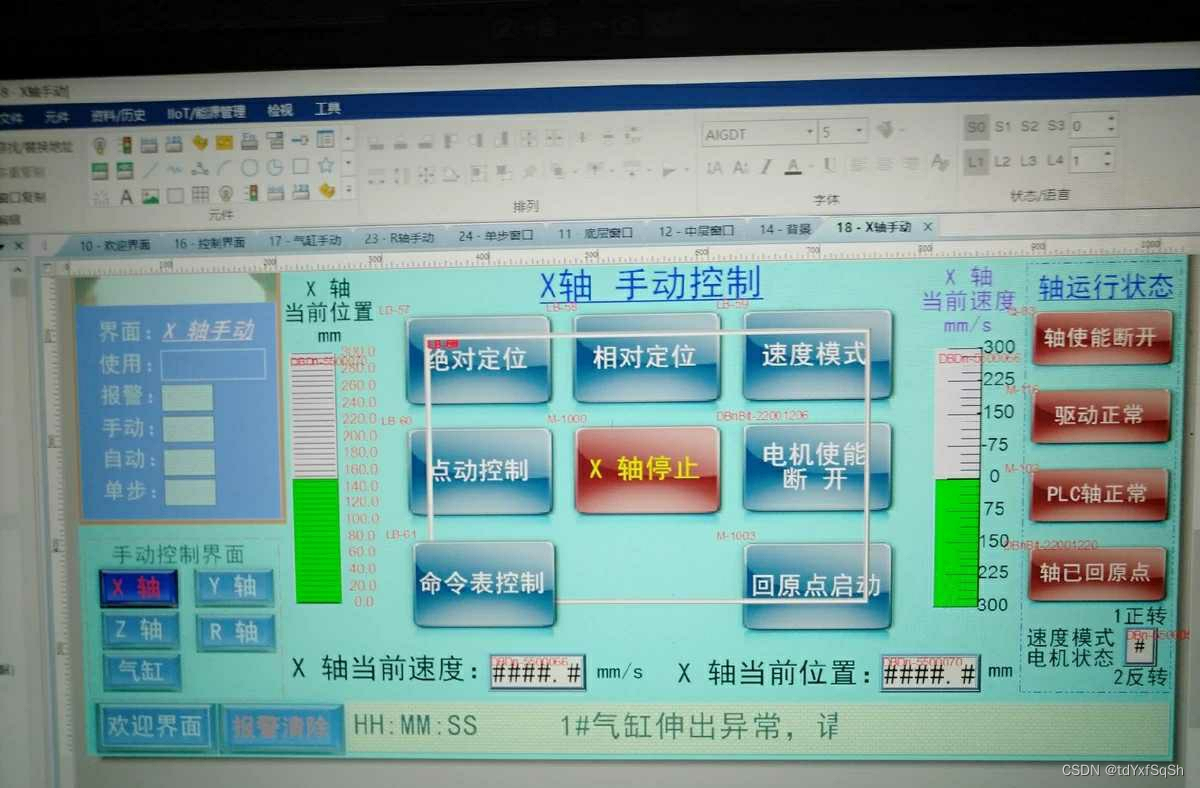
1.内容涵盖伺服,步进点动,回原,相对定位,绝对定位,速度模式控制 特别适合学习伺服和步进的朋友们 PTO伺服轴脉冲定位控制+速度模式控制+扭矩模式;
2.每个功能块可以无数次重复调用,可以建成库,用时调出即可。
西门子S7-1200控制四轴伺服程序案例
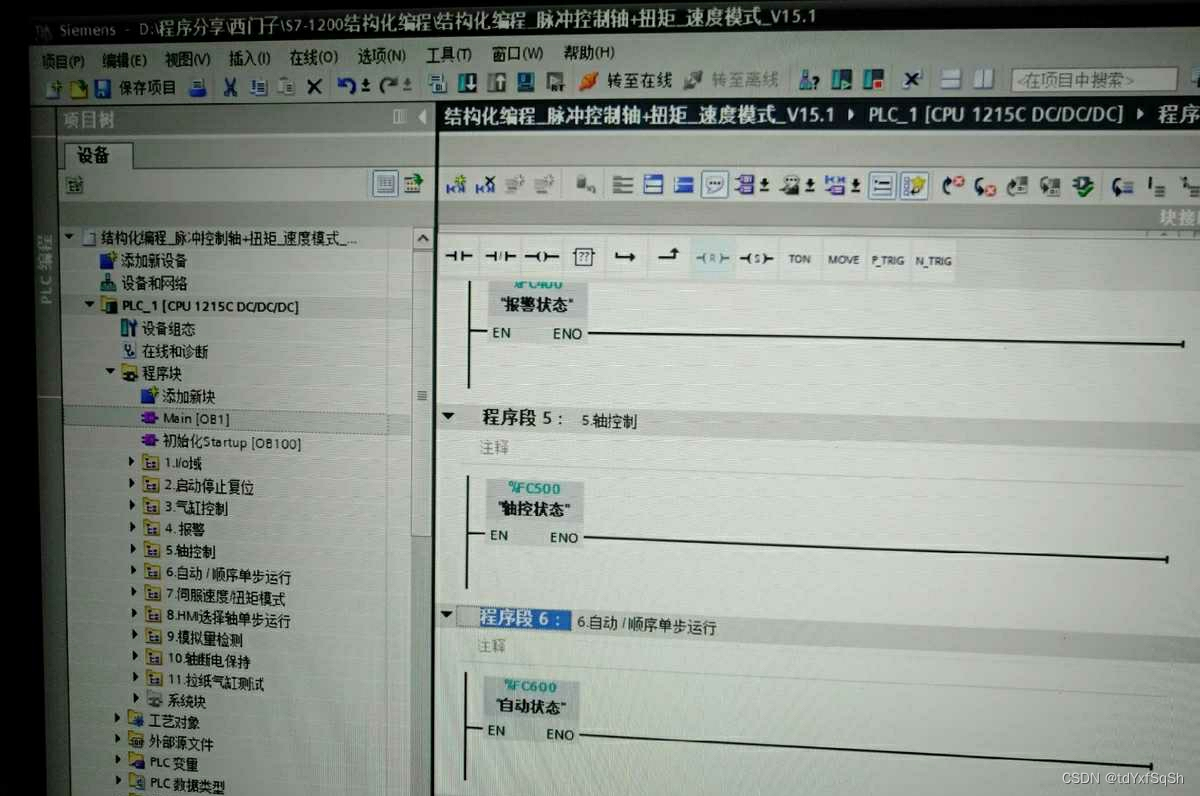
一、引言 随着现代工业自动化的发展,伺服系统的应用越来越广泛。西门子S7-1200控制器是一款强大的工业自动化控制设备,广泛应用于各种工业领域。本文将介绍一个基于S7-1200控制器的四轴伺服系统的程序案例。本案例内容涵盖了伺服控制的基本功能,如步进点动、回原、相对定位、绝对定位、速度模式控制等,特别适合对伺服和步进控制有需求的工程师和学习者。本案例还具备高度的可复用性,每个功能块都可以无数次重复调用,可以建成库,方便使用时调出即可。
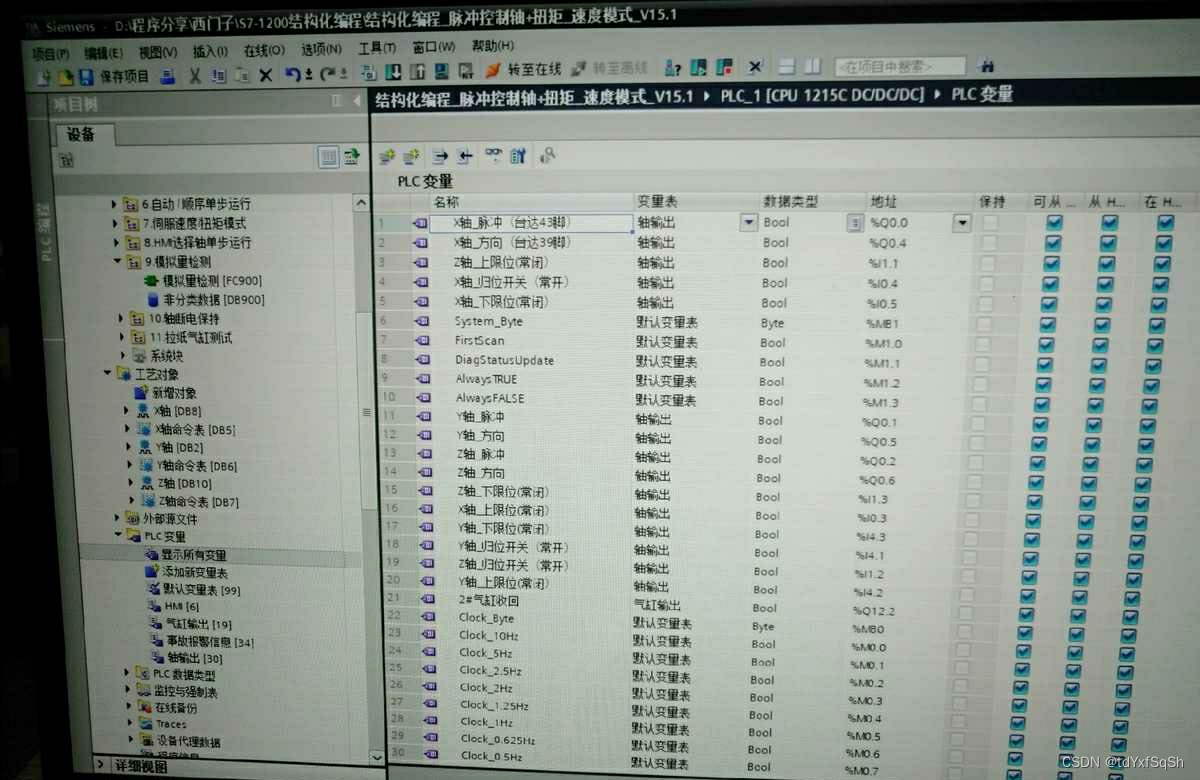
二、系统简介 本案例所涉及的四轴伺服系统由四个伺服电机、一个S7-1200控制器以及相关的传感器和执行器组成。该系统通过S7-1200控制器实现了PTO伺服轴脉冲定位控制、速度模式控制和扭矩模式控制等功能。
三、系统架构 系统架构如下图所示: (此处插入系统架构图)
四、系统设计
-
伺服轴脉冲定位控制 伺服轴脉冲定位控制是实现伺服电机在特定位置进行定位的关键功能。在本案例中,我们使用了S7-1200控制器的高速计数输入模块,通过输入特定的脉冲信号实现对伺服电机的位置控制。具体的控制算法可以参考以下伪代码: (此处插入伺服轴脉冲定位控制的伪代码)
-
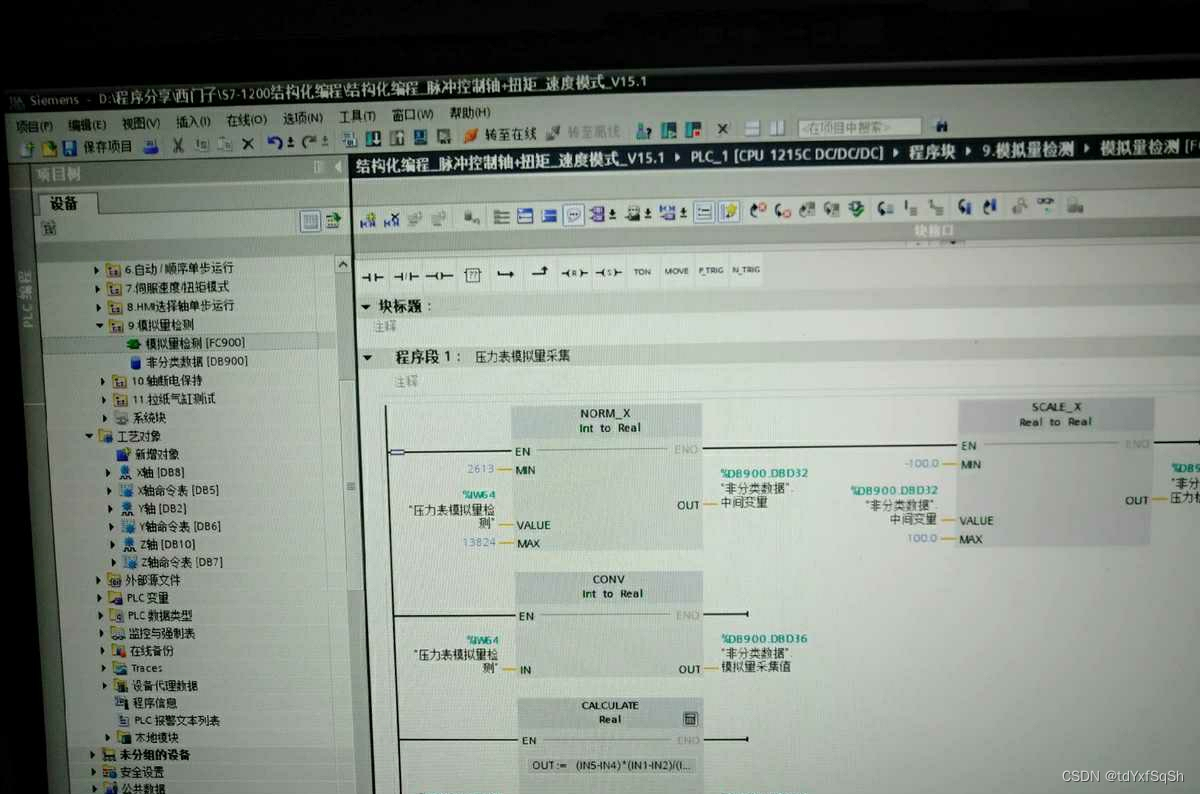
速度模式控制 速度模式控制是实现伺服电机按照设定的速度进行运动的功能。在本案例中,我们使用了S7-1200控制器的模拟输出模块,通过输出相应的模拟信号实现对伺服电机的速度控制。具体的控制算法可以参考以下伪代码: (此处插入速度模式控制的伪代码)
-
扭矩模式控制 扭矩模式控制是实现伺服电机按照设定的力矩进行运动的功能。在本案例中,我们使用了S7-1200控制器的模拟输出模块,通过输出相应的模拟信号实现对伺服电机的扭矩控制。具体的控制算法可以参考以下伪代码: (此处插入扭矩模式控制的伪代码)
五、实验结果与分析 通过对四轴伺服系统的程序案例实施实验,并进行了详细的测试和分析。实验结果表明,本案例所设计的程序能够准确地实现伺服轴脉冲定位控制、速度模式控制和扭矩模式控制等功能。该系统在运行过程中表现稳定,响应速度快,具备较高的控制精度和可靠性。
六、总结与展望 本文通过介绍一个基于西门子S7-1200控制器的四轴伺服系统的程序案例,详细阐述了伺服控制的基本功能和实现方法。该案例具备较高的实用性和可复用性,可供对伺服和步进控制有需求的工程师和学习者参考和借鉴。未来,可以进一步优化和扩展该系统,以应对更复杂的工业自动化控制需求。
七、参考文献 [1] Siemens S7-1200 Programmable Controller Manual [2] Siemens S7-1200 Programming Guide [3] 《西门子S7-1200控制器应用与实战》
以上就是本文的全部内容,给出了一个基于西门子S7-1200控制器的四轴伺服系统的程序案例,并详细介绍了伺服轴脉冲定位控制、速度模式控制和扭矩模式控制等功能的实现方法。希望该案例能够对读者对伺服控制有所帮助,并激发进一步研究和应用的兴趣。
相关代码,程序地址:http://lanzouw.top/656185945200.html


















 1239
1239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









