







memtable是k-v数据在内存中的存储对象,当内存中的memtable达到一定的大小时,就需要dump到磁盘中,而sstable就是数据在磁盘中的存储对象,今天看看leveldb的table对象。有关部分代码在leveldb源码文件下的table文件夹内。
其实有关sstable部分的源码剖析不好讲,最主要的是要弄清楚sstable的存储格式,在这里我就提几个理解sstable结构的要点,后面从代码中理解sstable结构:
- 因为是memtable dump到磁盘的,所以sstable的记录是有序的。
- 同Log文件一样,物理结构也是划分为固定大小的存储块
在table文件夹下:
- format:格式定义
- block/block_builder:block相关的操作
- table/table_builder:table相关的操作
- iterator_wrapper:优化的迭代器
介绍完sstable,下面来看源码,首先锁定block:
block结构
成员变量:
const char* data_;//包含了entrys、重启点数组和写在最后4bytes的重启点个数
size_t size_;//大小
uint32_t restart_offset_; // Offset in data_ of restart array
bool owned_;//block是否存有数据的标志位,析构函数delete data时会判断这里有一个关键点:重启点
首先,你要了解,一份KV数据作为block内的一个entry(条目),考虑节省空间,leveldb对key的存储进行前缀压缩,每个entry中会记录key与前一个key前缀相同的字节(shared_bytes)和自己独有的字节(unshared_bytes),读取时,对block进行遍历,每一个key根据前一个key可以构造出来,entry存储形式如下:
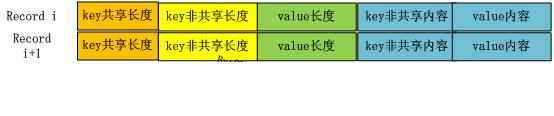
然后,如果完全按照上面所述的处理,对每个key的查找,都要从block的头开始遍历,所以进一步细化粒度,对 block 内的前缀压缩分区段进行。 若干个 key 做前缀压缩之后,就重新开始下一轮。restart_offset_ 就是记录重启点信息在block的偏移量。Block::NumRestarts()返回重启点的个数。所以整个block的格式应该是(trailer先不管,放置压缩标志位和CRC校验):

block实现
- DecodeEntry函数
static inline const char* DecodeEntry(const char* p, const char* limit,
uint32_t* shared,
uint32_t* non_shared,
uint32_t* value_length) {
if (limit - p < 3) return NULL;
*shared = reinterpret_cast<const unsigned char*>(p)[0];
*non_shared = reinterpret_cast<const unsigned char*>(p)[1];
*value_length = reinterpret_cast<const unsigned char*>(p)[2];
if ((*shared | *non_shared | *value_length) < 128) {
// Fast path: all three values are encoded in one byte each
p += 3;
} else {
if ((p = GetVarint32Ptr(p, limit, shared)) == NULL) return NULL;
if ((p = GetVarint32Ptr(p, limit, non_shared)) == NULL) return NULL;
if ((p = GetVarint32Ptr(p, limit, value_length)) == NULL) return NULL;
}
if (static_cast<uint32_t>(limit - p) < (*non_shared + *value_length)) {
return NULL;
}
return p;
}如上所说,每一个entry写入block是先写入key的共享长度(shared),非共享长度(non_shared)和value长度(value _length),而对于表示长度的整型变量,前面说过leveldb是编码成varint存储的,所以首先要对这三个数解码。函数一开始假设这三个长度两都很小,编码成varint都只有一个字节,所以取出三个字节,然后通过
if ((*shared | *non_shared | *value_length) < 128)判断三个数的最高位是否有置为1,因为在varint编码中,最高位为1代表后面的字节也属于这个数,而如果有一个varint的长度大于1,自然假设也就不成立了。只好一一解码:
if ((p = GetVarint32Ptr(p, limit, shared)) == NULL) return NULL;
if ((p = GetVarint32Ptr(p, limit, non_shared)) == NULL) return NULL;
if ((p = GetVarint32Ptr(p, limit, value_length)) == NULL) return NULL;最后返回p代表此entry的key-value值首地址。GetVarint32Ptr()函数可见我前面关于varint的介绍,也看参考coding.cc文件。
- 迭代器类
为了实现在block内查找target entry,block定义了一个Iter的嵌套类,继承自虚基类Iterator
成员变量:
private:
const Comparator* const comparator_;//比较器
const char* const data_; // 数据起始点
uint32_t const restarts_; // 重启点数组在block的偏移量
uint32_t const num_restarts_; // 重启点个数
// current_ is offset in data_ of current entry. >= restarts_ if !Valid
uint32_t current_;//迭代器指向block内的数据偏移量,真实位置data_ + current_
uint32_t restart_index_; // 迭代器指向的数据所在重启区的索引,该区的重启点(起点)位置对应data_ + DecodeFixed32(data_ + restarts_ + restart_index_* sizeof(uint32_t)),如你所见,迭代器的大部分操作都是这样的底层字节移动,没有用易于明白的数组索引来实现
std::string key_;
Slice value_;//目前指向的key-value值,不包括前面的长度信息
Status status_;迭代器的操作,就说一个seek
virtual void Seek(const Slice& target) {
// Binary search in restart array to find the last restart point
// with a key < target
uint32_t left = 0;
uint32_t right = num_restarts_ - 1;
while (left < right) {
uint32_t mid = (left + right + 1) / 2;
uint32_t region_offset = GetRestartPoint(mid);
uint32_t shared, non_shared, value_length;
const char* key_ptr = DecodeEntry(data_ + region_offset,
data_ + restarts_,
&shared, &non_shared, &value_length);
if (key_ptr == NULL || (shared != 0)) {
CorruptionError();
return;
}
Slice mid_key(key_ptr, non_shared);
if (Compare(mid_key, target) < 0) {
// Key at "mid" is smaller than "target". Therefore all
// blocks before "mid" are uninteresting.
left = mid;
} else {
// Key at "mid" is >= "target". Therefore all blocks at or
// after "mid" are uninteresting.
right = mid - 1;
}
}这里面用的是二分查找法,在重启点数组中不停地定位到中间重启点
uint32_t mid = (left + right + 1) / 2;
uint32_t region_offset = GetRestartPoint(mid);用上文的DecodeEntry函数出mid重启点的key-value值指针,然后和目标值target比较大小,更新左右点left,right。直到left < right结束循环。定位了target所在的重启区,然后深入定位target
SeekToRestartPoint(left);
while (true) {
if (!ParseNextKey()) {
return;
}
if (Compare(key_, target) >= 0) {
return;
}
}当current_的位置超过了重启点数组的位置,说明此block无所找的entry。
嗯,好了,关于sstable的block就写到这里,个人感觉block的实现代码还是值得一看的,可以去看看作者为了平衡查找速度和block大小设计出的block结构,还有迭代器的实现,作者对于每个变量的定位相当精彩,例如:
inline uint32_t NextEntryOffset() const {
return (value_.data() + value_.size()) - data_;
}uint32_t GetRestartPoint(uint32_t index) {
assert(index < num_restarts_);
return DecodeFixed32(data_ + restarts_ + index * sizeof(uint32_t));
}如果本博客有关内容存在偏差,欢迎大家指正。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









