







BST树
即二叉搜索树:
1.所有非叶子结点至多拥有两个儿子(Left和Right);
2.所有结点存储一个关键字;
3.非叶子结点的左指针指向小于其关键字的子树,右指针指向大于其关键字的子树;
如:
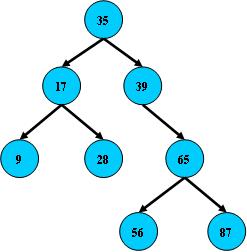
BST树的搜索,从根结点开始,如果查询的关键字与结点的关键字相等,那么就命中;
否则,如果查询关键字比结点关键字小,就进入左儿子;如果比结点关键字大,就进入
右儿子;如果左儿子或右儿子的指针为空,则报告找不到相应的关键字;
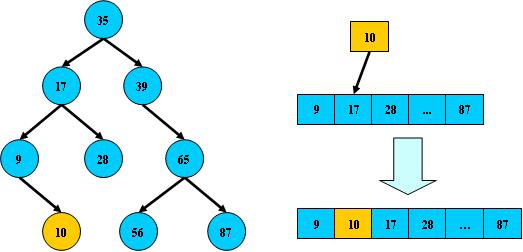
如果BST树的所有非叶子结点的左右子树的结点数目均保持差不多(平衡),那么B树
的搜索性能逼近二分查找;但它比连续内存空间的二分查找的优点是,改变BST树结构
(插入与删除结点)不需要移动大段的内存数据,甚至通常是常数开销;
如:
但BST树在经过多次插入与删除后,有可能导致不同的结构:
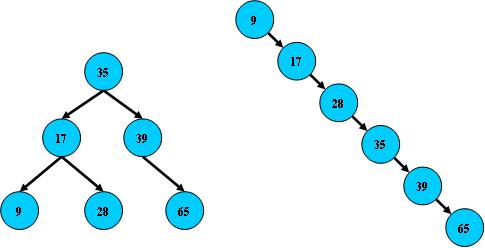
右边也是一个BST树,但它的搜索性能已经是线性的了;同样的关键字集合有可能导致不同的
树结构索引;所以,使用BST树还要考虑尽可能让BST树保持左图的结构,和避免右图的结构,也就
是所谓的“平衡”问题;
AVL平衡二叉搜索树
定义:平衡二叉树或为空树,或为如下性质的二叉排序树:
(1)左右子树深度之差的绝对值不超过1;
(2)左右子树仍然为平衡二叉树.
平衡因子BF=左子树深度-右子树深度.
平衡二叉树每个结点的平衡因子只能是1,0,-1。若其绝对值超过1,则该二叉排序树就是不平衡的。
如图所示为平衡树和非平衡树示意图:

RBT 红黑树
AVL是严格平衡树,因此在增加或者删除节点的时候,根据不同情况,旋转的次数比红黑树要多;
红黑是弱平衡的,用非严格的平衡来换取增删节点时候旋转次数的降低;
所以简单说,搜索的次数远远大于插入和删除,那么选择AVL树,如果搜索,插入删除次数几乎差不多,应该选择RB树。
红黑树上每个结点内含五个域,color,key,left,right,p。如果相应的指针域没有,则设为NIL。
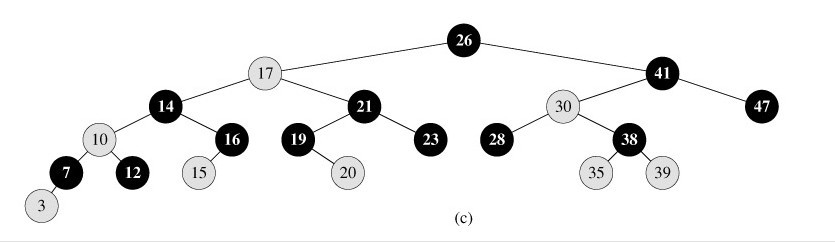
一般的,红黑树,满足以下性质,即只有满足以下全部性质的树,我们才称之为红黑树:
1)每个结点要么是红的,要么是黑的。
2)根结点是黑的。
3)每个叶结点,即空结点(NIL)是黑的。
4)如果一个结点是红的,那么它的俩个儿子都是黑的。
5)对每个结点,从该结点到其子孙结点的所有路径上包含相同数目的黑结点。
下图所示,即是一颗红黑树:
B-树
是一种平衡多路搜索树(并不是二叉的):
1.定义任意非叶子结点最多只有M个儿子;且M>2;
2.根结点的儿子数为[2, M];
3.除根结点以外的非叶子结点的儿子数为[M/2, M];
4.每个结点存放至少M/2-1(取上整)和至多M-1个关键字;(至少2个关键字)
5.非叶子结点的关键字个数=指向儿子的指针个数-1;
6.非叶子结点的关键字:K[1], K[2], …, K[M-1];且K[i] < K[i+1];
7.非叶子结点的指针:P[1], P[2], …, P[M];其中P[1]指向关键字小于K[1]的
子树,P[M]指向关键字大于K[M-1]的子树,其它P[i]指向关键字属于(K[i-1], K[i])的子树;
8.所有叶子结点位于同一层;
如:(M=3)
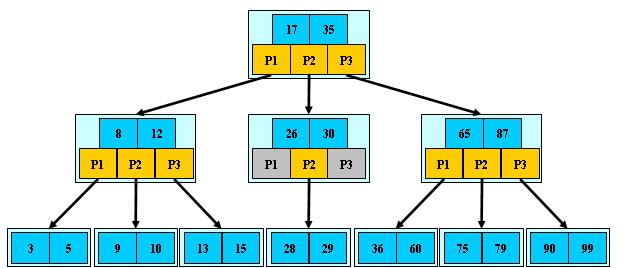
B-树的搜索,从根结点开始,对结点内的关键字(有序)序列进行二分查找,如果
命中则结束,否则进入查询关键字所属范围的儿子结点;重复,直到所对应的儿子指针为
空,或已经是叶子结点;
B-树的特性:
1.关键字集合分布在整颗树中;
2.任何一个关键字出现且只出现在一个结点中;
3.搜索有可能在非叶子结点结束;
4.其搜索性能等价于在关键字全集内做一次二分查找;
5.自动层次控制;
由于限制了除根结点以外的非叶子结点,至少含有M/2个儿子,确保了结点的至少
利用率,其最底搜索性能为:
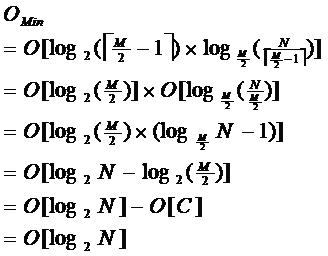
其中,M为设定的非叶子结点最多子树个数,N为关键字总数;
所以B-树的性能总是等价于二分查找(与M值无关),也就没有B树平衡的问题;
由于M/2的限制,在插入结点时,如果结点已满,需要将结点分裂为两个各占
M/2的结点;删除结点时,需将两个不足M/2的兄弟结点合并;
B+树
B+树是B-树的变体,也是一种多路搜索树:
1.其定义基本与B-树同,除了:
2.非叶子结点的子树指针与关键字个数相同;
3.非叶子结点的子树指针P[i],指向关键字值属于[K[i], K[i+1])的子树
(B-树是开区间);
5.为所有叶子结点增加一个链指针;
6.所有关键字都在叶子结点出现;
如:(M=3)
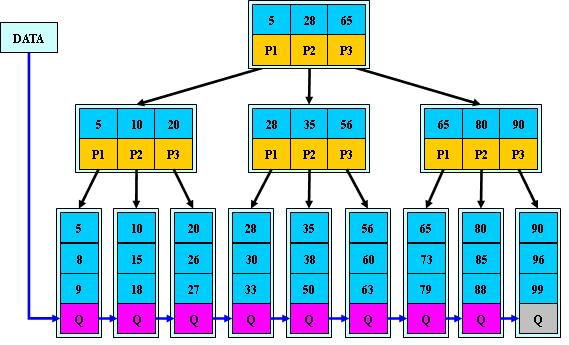
B+的搜索与B-树也基本相同,区别是B+树只有达到叶子结点才命中(B-树可以在
非叶子结点命中),其性能也等价于在关键字全集做一次二分查找;
B+的特性:
1.所有关键字都出现在叶子结点的链表中(稠密索引),且链表中的关键字恰好
是有序的;
2.不可能在非叶子结点命中;
3.非叶子结点相当于是叶子结点的索引(稀疏索引),叶子结点相当于是存储
(关键字)数据的数据层;
4.更适合文件索引系统;比如对已经建立索引的数据库记录,查找10<=id<=20,那么只要通过根节点搜索到id=10的叶节点,之后只要根据叶节点的链表找到第一个大于20的就行了,比B-树在查找10到20内的每一个时每次都从根节点出发查找提高了不少效率。
B*树
是B+树的变体,在B+树的非根和非叶子结点再增加指向兄弟的指针;
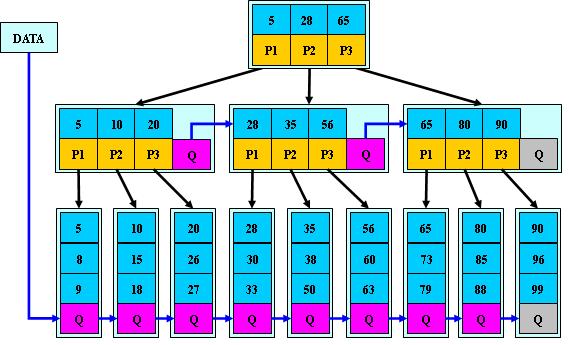
B*树定义了非叶子结点关键字个数至少为(2/3)*M,即块的最低使用率为2/3
(代替B+树的1/2);
B+树的分裂:当一个结点满时,分配一个新的结点,并将原结点中1/2的数据
复制到新结点,最后在父结点中增加新结点的指针;B+树的分裂只影响原结点和父
结点,而不会影响兄弟结点,所以它不需要指向兄弟的指针;
B*树的分裂:当一个结点满时,如果它的下一个兄弟结点未满,那么将一部分
数据移到兄弟结点中,再在原结点插入关键字,最后修改父结点中兄弟结点的关键字
(因为兄弟结点的关键字范围改变了);如果兄弟也满了,则在原结点与兄弟结点之
间增加新结点,并各复制1/3的数据到新结点,最后在父结点增加新结点的指针;
所以,B*树分配新结点的概率比B+树要低,空间使用率更高;
小结
B树:二叉树,每个结点只存储一个关键字,等于则命中,小于走左结点,大于
走右结点;
B-树:多路搜索树,每个结点存储M/2到M个关键字,非叶子结点存储指向关键
字范围的子结点;
所有关键字在整颗树中出现,且只出现一次,非叶子结点可以命中;
B+树:在B-树基础上,为叶子结点增加链表指针,所有关键字都在叶子结点
中出现,非叶子结点作为叶子结点的索引;B+树总是到叶子结点才命中;
B*树:在B+树基础上,为非叶子结点也增加链表指针,将结点的最低利用率
从1/2提高到2/3;
B+/B*Tree应用
数据库索引–索引文件和数据文件是分离的,索引文件仅保存数据记录的地址。
数据库索引–表数据文件本身就是按B+Tree组织的一个索引结构,这棵树的叶节点data域保存了完整的数据记录。这个索引的key是数据表的主键。
倒排索引–也可以由B树及其变种实现但不一定非要B树及其变种实现,如lucene没有使用B树结构,因此lucene可以用二分搜索算法快速定位关键词。实现时,lucene将下面三列分别作为词典文件(Term Dictionary)、频率文件(frequencies)、位置文件 (positions)保存。其中词典文件不仅保存有每个关键词,还保留了指向频率文件和位置文件的指针,通过指针可以找到该关键字的频率信息和位置信息。
-
关键词 文章号[出现频率] 出现位置
-
guangzhou
1[
2]
3,
6
-
he
2[
1]
1
-
i
1[
1]
4
-
live
1[
2]
2,
5,
-
2[
1]
2
-
shanghai
2[
1]
3
-
tom
1[
1]
1
参考文章
B-树和B+树的应用:数据搜索和数据库索引 http://blog.csdn.net/hguisu/article/details/7786014
B树、B-树、B+树、B*树 http://www.cnblogs.com/oldhorse/archive/2009/11/16/1604009.html
</div>















 1002
1002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









