







 本文提出了一个History Buffer Updating Algorithm,用于处理GCMP(Global Continuous MultiPoint)候选的更新。算法基于一系列假设,如新的聚类是独立的,候选对象也是独立的,并且GCMP有特定的时长和间隔要求。每个GCMP有三种状态,每个candidate有两种状态。算法通过哈希表存储HB中的candidates,根据核心点编号进行new clusters与candidates的匹配,更新summary结构,识别出complete或invalid GCMP。
本文提出了一个History Buffer Updating Algorithm,用于处理GCMP(Global Continuous MultiPoint)候选的更新。算法基于一系列假设,如新的聚类是独立的,候选对象也是独立的,并且GCMP有特定的时长和间隔要求。每个GCMP有三种状态,每个candidate有两种状态。算法通过哈希表存储HB中的candidates,根据核心点编号进行new clusters与candidates的匹配,更新summary结构,识别出complete或invalid GCMP。
一些定义:
HB:History Buffer,存放所有GCMP的candidates
Cnew:所有从new data中得到的new clusters的集合
前提假设:
1、所有的new clusters都是独立的,无任何交集。所有的candidates中的对象也是独立的,没有交集。
2、GCMP的要求:
1) 全局时长要求:K>1
2) 局部时长要求:L>1
3) 局部间隔要求:G>1
3、candidate的数据结构:拟采用summary结构,即只需要保留关于该candidate的几个相关参数的值:{kt, lt, gt, O, c},前三个分别表示当前已有的全局时长、最新的局部时长、最新的局部间隔时长的value,第四个是所含的objects的编号(可为事先编好的全局编号),最后一个是分配给该candidate的new cluster。
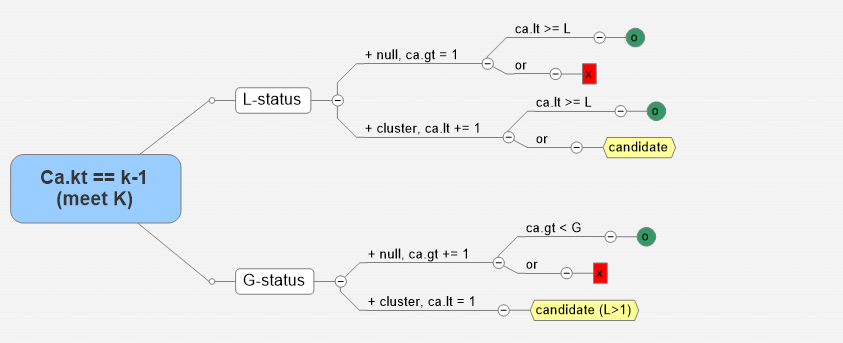
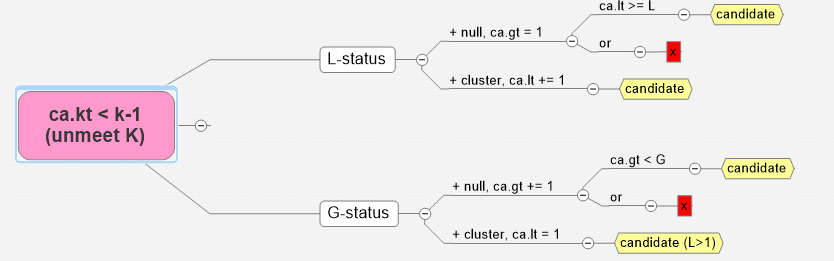
4、每个GCMP有三种状态:
1) complete。complete是指发现了完整的GCMP,要提交出去。
2) candidate。是指有待成为complete状态,存在HB中。
3) invalid。是指candidate经过当前时刻判断后,今后无法成为complete GCMP,要从HB中被清除出去。
5、每个candidate有两种状态:
1) L-status。是指在当前时刻,还未与new cluster融合时,处在局部连续的状态,此时的ca.lt即为当前局部连续的时刻数,ca.gt=0。
2)G-status。表明当前处在局部间断的状态,此时ca.gt即为当前间隔的时刻数,ca.lt=0。
6、HB中所有candidates的数据结构:拟采用哈希表。key是candidate的O中的core points的编号,value则是candidate的summary。方便将new cluster匹配到对应的candidate。
算法步骤
完成new clusters与candidates的快速匹配,通过匹配new clusters的core points的编号与candidate的key。匹配后,会出现相同new clusters匹配到了多个candidates处,以及有的candidates没有被匹配上任何new cluster的情况;
遍历所有的candidates,处理它们的summary结构{kt, lt, gt, O, c},即c的到来会使前四个参数出现哪些变化,从中找到complete GCMP或invalid GCMP,如果都不是,继续当candidate。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2688
2688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









