







1.编码器
增量编码器只输出设备的位置变化和方向;
根据信号的相位来判定方向;脉冲的频率判定速度;
z通道只有一个信号,可以判定位置
绝对编码器,含有多个码道
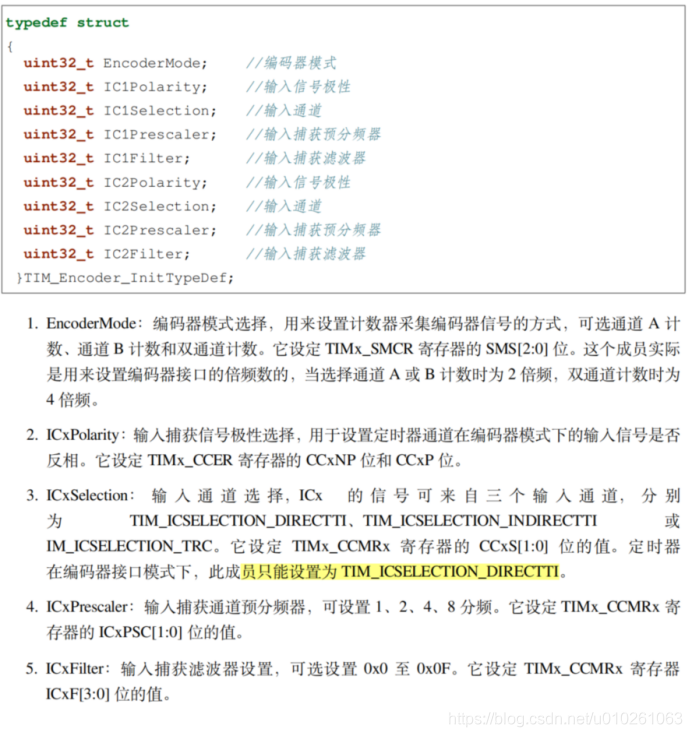
1.1.编码器参数
分辨率: 一圈产生的脉冲数量;ppr,其分辨率表示为编码器转轴旋转一圈所产生的脉冲数,即脉冲数/转 也叫多少线
精度: 读数和实际位置的最大误差,角度、角分,
最大响应频率, 每秒输出的脉冲数量
信号输出形式 直接/协议
1.2.STM32编码器结构
图 1-1STM32编码器结构
1.3.电机速度、方向的计算方法
编码器的计数方向代表转向
使用编码器模式 速度 = 每秒计数次数/编码器的分辨率
2.PID算法
比例环节,通过偏差来矫正误差的;加水没有人使用水,增大系数,加快系统相应;
积分环节:通过累计误差来矫正误差;解决稳态误差,一边加水,一边用水,用用量是均衡的;
微分环节:一边加水一边用水,用水量不是均衡的,可以实现调节偏差;超前调节,抑制震荡
2.1.连续PID

图 2-1连续的PID算法
一直增加能量,但是又有一直在损耗的因素存在,就会存在静态误差(一边加水,一边用水的例子,如果加水的量和用水的量相等,就会出现一直加水不到目标位置,这就是静态误差)
积分环节主要用于就是消除静态误差提高系统的无差度。但是积分作用太强会使系统超调加大,甚至使系统出现振荡。
增大积分时间有利于减小超调,是系统稳定性增加,但是会增长消除静差的时间
微分环节的作用是反应系统偏差的一个变化趋势,也可以说是变化率;
是具有较大惯性的被控对象使用 PI 控制器很难得到很好的动态调节品质,系统会产生较大的超调和振荡,这时可以引入微分作用
2.2.位置式PID
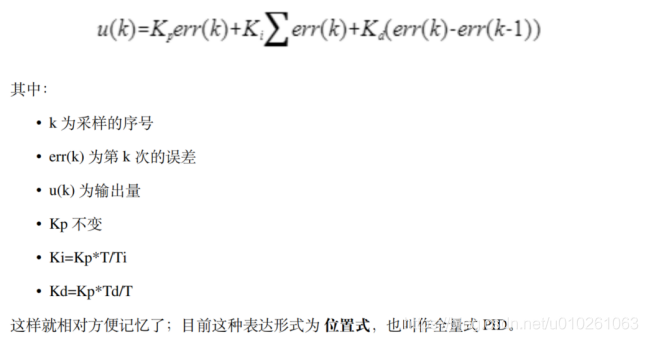
图 2-2
2.3.增量式PID
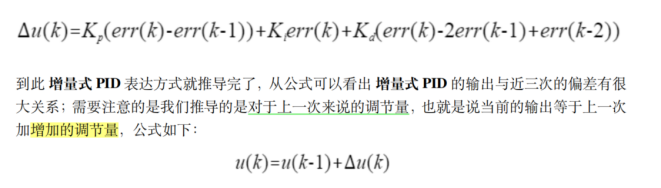
图 2-3
2.4.增量式和位置式PID对比区别
• 增量式算法不需要对积分项累加,控制量增量只与近几次的误差有关,计算误差对控制量计算的影响较小。而位置式算法要对近几次的偏差的进行积分累加,容易产生较大的累加误差;
• 增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作;而位置式的输出直接对应对象的输出,因此对系统影响较大;
• 增量式算法控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而 位置式算法适用于执行机构不带积分部件的对象,如电液伺服阀;
• 在进行 PID 控制时,位置式 PID 需要有积分限幅和输出限幅,而 增量式 PID 只需输出限幅。
3.直流有刷电机
空载转速:正常工作电压下电机不带任何负载的转速(单位为 r/min(转/分))。空载转速由于没有反向力矩,所以输出功率和堵转情况不一样,该参数只是提供一个电机在规定电压下最大转速的参考。
• 空载电流:正常工作电压下电机不带任何负载的工作电流(单位 mA(毫安))。越好的电
机,在空载时,该值越小。
• 负载转速:正常工作电压下电机带负载的转速。
• 负载力矩:正常工作电压下电机带负载的力矩(N· m(牛米))。
• 负载电流:负载电流是指电机拖动负载时实际检测到的定子电流数值。
• 堵转力矩:在电机受反向外力使其停止转动时的力矩。如果电机堵转现象经常出现,则会
损坏电机,或烧坏驱动芯片。所以大家选电机时,这是除转速外要考虑的参数。堵转时间
一长,电机温度上升的很快,这个值也会下降的很厉害。
• 堵转电流:在电机受反向外力使其停止转动时的电流,此时电流非常大,时间稍微就可能
会烧毁电机,在实际使用时应尽量避免。
• 减速比:是指没有减速齿轮时转速与有减速齿轮时转速之比。
• 功率:般指的是它的额定功率(单位 W(瓦)),即在额定电压下能够长期正常运转的最大功率,也是指电动机在制造厂所规定的额定情况下运行时, 其输出端的机械功率
3.1.驱动器
使用H桥可以实现电机正反转,使用与门可以实现同侧晶体管同时导通的情况;
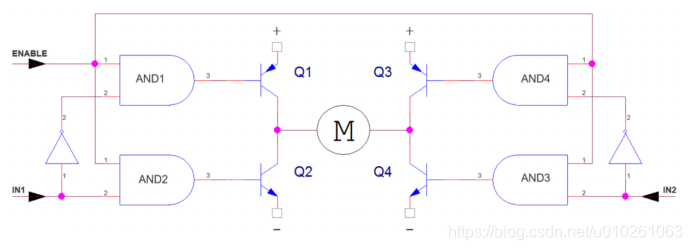
图 3-1
电机调速、使用pwm信号实现,调节占空比实现电机速度的控制
3.2.死区控制
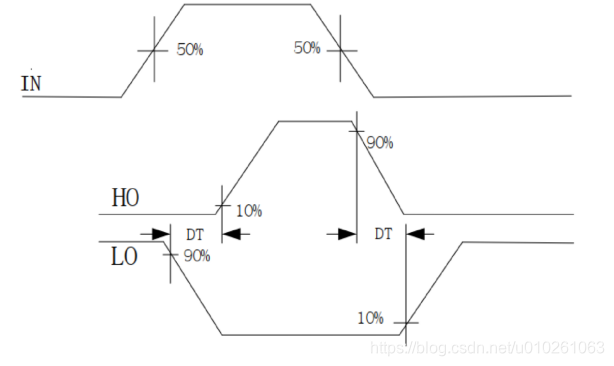
图 3-2
舵机控制
使用pwm信号;信号的占空比控制转动的角度。
4.步进电机
通常步进电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。磁场会带动 转子旋转一定的角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转步距角。
在不超载的情况下电机的转速和停止位置只取决于脉冲信号的频率和数量;并且步进电机的脉冲与步进旋转的角度成正比,脉冲的频率与步进的转速成正比 ,改变绕组通电的顺序,电机就会反转。
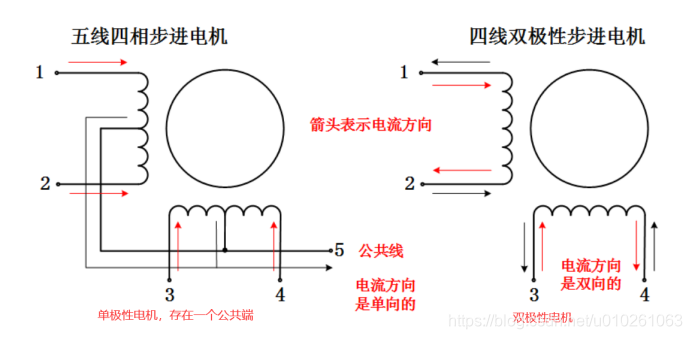
图 4-1单极性和双极性电机示意图
4.1.单相激励步进
每次只有一个线圈通电
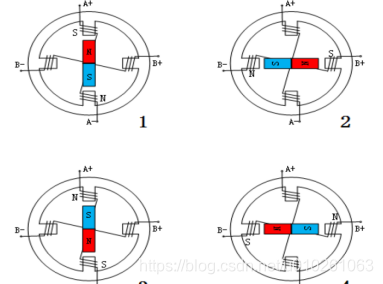
图 4-2单相激励步进
4.2.双向激励
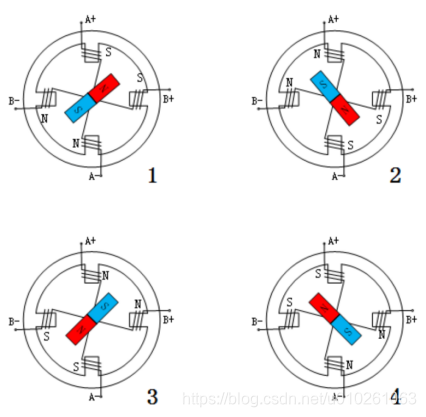
图 4-3双向激励步进
4.3.混合激励方式
- A 相通电, B 相不通电
- A、 B 相全部通电,且电流相同,产生相同磁性
- B 相通电, A 断电
- B 相通电, A 相通电,且电流相等,产生相同磁性
- A 相通电, B 断电
- A、 B 相全部通电,且电流相同,产生相同磁性
- B 相通电, A 断电
- B 相通电, A 相通电,且电流相等,产生相同磁性
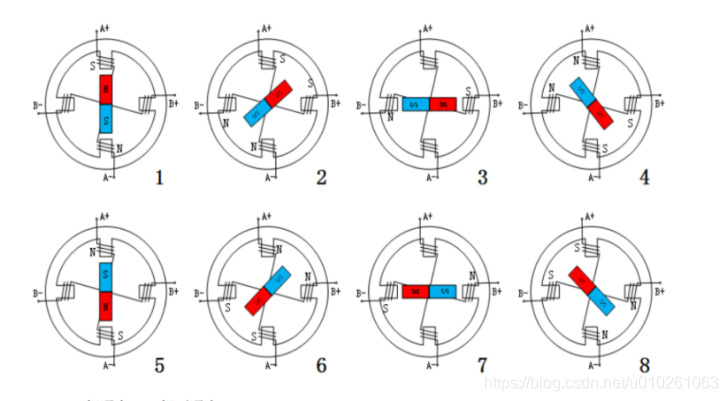
4.4.细分原理
改变定子的电流比例就可以使得转子在任意角度停住。细分的原理就是:通过改变定子的电流比例,改变转子在一个整步中的不同位置,可以将一个整步分成多个小步来运行。
4.5.静态指标术语
- 相数:产生不同对极 N、 S 磁场的激磁线圈对数,也可以理解为步进电机中线圈的组数,其中两相步进电机步距角为1.8°,三相的步进电机步距角为1.5°,相数越多的步进电机,其步距角就越小。
- • 拍数:完成一个磁场周期性变化所需脉冲数或导电状态用 n 表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即 AB-BC-CD-DA-AB,四相八拍运 行方式即 A-AB-B-BC-C-CD-D-DA-A。
- • 步距角:一个脉冲信号所对应的电机转动的角度,可以简单理解为一个脉冲信号驱动的角 度,电机上都有写,一般 42 步进电机的步距角为 1.8°
- • 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械 误差造成的)。
- • 静转矩:电机在额定静态电压作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力 矩是衡量电机体积的标准,与驱动电压及驱动电源等无关
4.6动态指标术语
• 步距角精度:步进电机转动一个步距角度的理论值与实际值的误差。用百分比表示:误差/步距角 *100%。
• 失步:电机运转时运转的步数,不等于理论上的步数。也可以叫做丢步,一般都是因负载太大或者是频率过快。
• 失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
• 最大空载起动频率:在不加负载的情况下,能够直接起动的最大频率。
• 最大空载的运行频率:电机不带负载的最高转速频率。
• 运行转矩特性:电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。
• 电机正反转控制:通过改变通电顺序而改变电机的正反转。
步进电机的转矩与速度成反比,速度越快力矩越小。
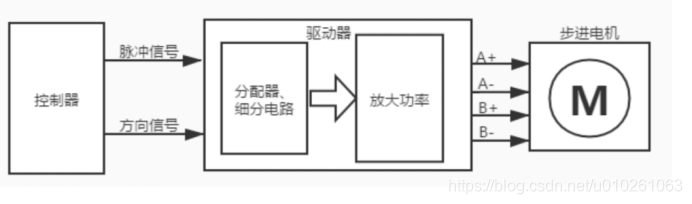
4.7.驱动器
控制器输出方向信号和脉冲信号来控制步进电机驱动器,驱动器将其功率放大然后作用到步进电机上。
5.直流无刷电机
启动时需要知道电机转子的起始位置,才知道需要导通的mos管
三相六臂全桥驱动电路来驱动无刷电机
5.1.工作原理
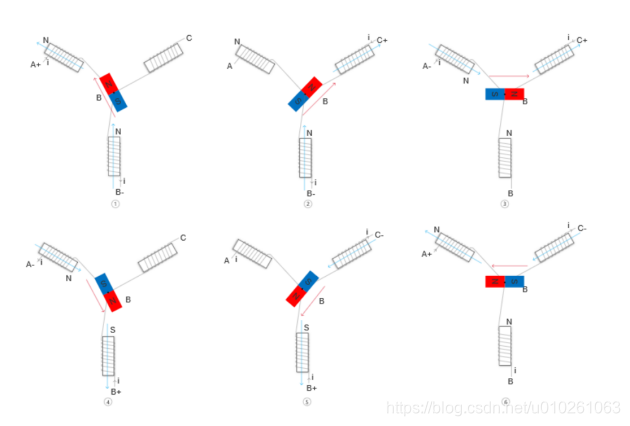
图 5-1三相星形联结的二二导通方式
5.2.驱动电路
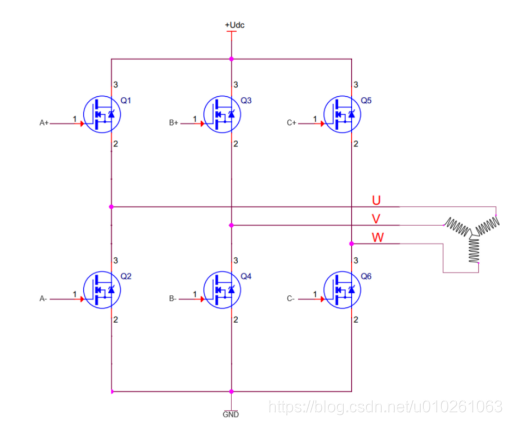
图 5-2驱动电路
驱动电路需要防止同侧的mos管同时导通的情况,否则烧毁电源或者是mos管
5.3.霍尔传感器
间隔120°的安装方式
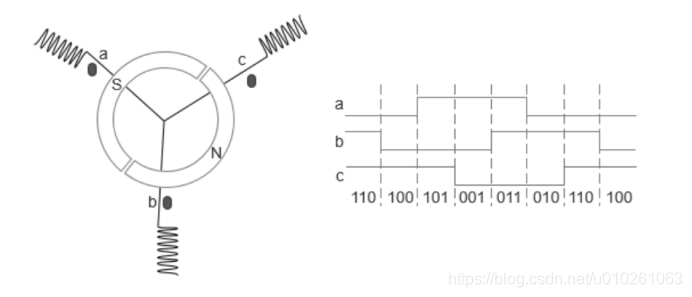
图 5-3霍尔传感器输出波形
电机厂家一般会给出霍尔传感器信号和对应mos管导通的真值表,一个是正转,一个是反转
驱动器保护
使用一个异或门和一个与门实现禁止同侧mos管同时导通的情况。
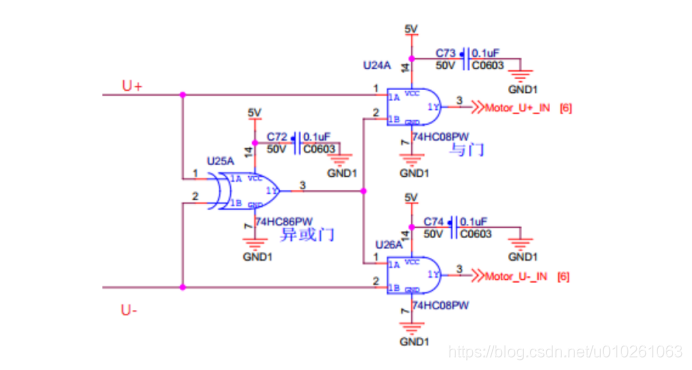
图 5-4防止同侧mos管导通的保护电路
5.4.直流无刷电机速度控制
使用pwm方式改变电压从而实现速度的控制
5.5.控制策略
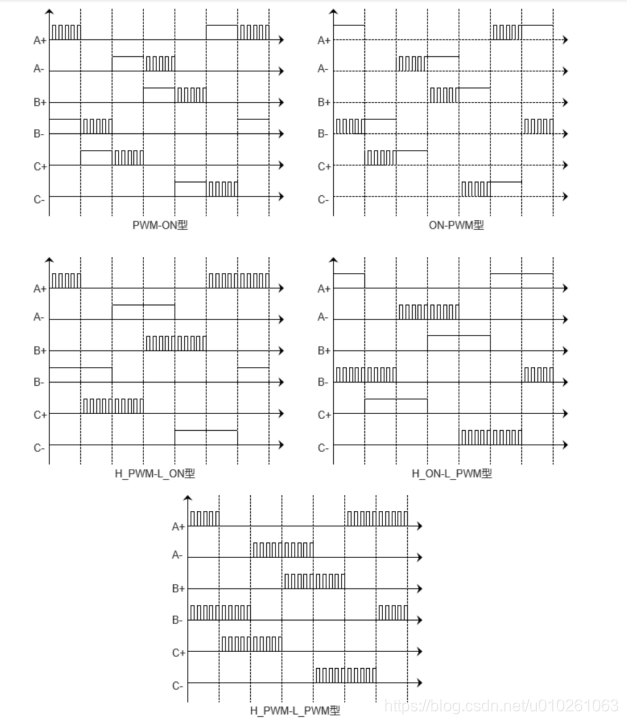
图 5-5五种控制策略
这 5 种调制方式图 5-5五种控制策略:
- PWM-ON 型。在 120° 导通区间,各开关管前 60° 采用 PWM 调制,后 60° 则恒通。
- ON-PWM 型。在 120° 导通区间,各开关管前 60° 恒通,后 60° 则采用 PWM 调制。
- H_PWM-L_ON 型。在 120° 导通区间,上桥臂开关管采用 PWM 调制,下桥臂恒通。
- H_ON-L_PWM 型。在 120° 导通区间,上桥臂开关管恒通,下桥臂采用 PWM 调制。
- H_PWM-L_PWM 型。在 120° 导通区间,上、下桥臂均采用 PWM 调制。


















 729
729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











