







接着之前的文章来写,本篇将实现RT端的编程,用的是片上的1553B0控制器
1、RT配置
*(volatile INT32U *)(BM1553b0REG + (0x3 << 2)) = 0x0001; //启动/复位寄存器,D0-复位,D1-BC/MT启动,D2-中断复位,D3-时标复位
*(volatile INT32U *)(BM1553b0REG + (0x7 << 2)) = 0x8000; //配置寄存器3#,D15-增强模式使能
*(volatile INT32U *)(BM1553b0REG + (0x7 << 2)) = 0x8081; //配置寄存器3#,D0-增强方式码处理中,D3-数据接收器忙无效,D2-RT时标分配失败使能,D4-数据接收器无效非法化,D7-非法化无效, D15-增强模式使能
*(volatile INT32U *)(BM1553b0REG + (0x0 << 2)) = 0x0001; //中断屏蔽寄存器,D1-消息结束
*(volatile INT32U *)(BM1553b0REG + (0x2 << 2)) = 0x9802; //配置寄存器2#,D0-隔离广播数据,D1-增强RT存储器管理,D11-覆盖非法数据,D12-RT双重缓冲使能,D13-存储器忙位查找表使能,D15-增强模式中断
*(volatile INT32U *)(BM1553b0REG + (0x8 << 2)) = 0x2008; //配置寄存器4#,D3-与配置寄存器#5一起锁存RT地址,D13-忽略忙的模式命令
*(volatile INT32U *)(BM1553b0REG + (0x9 << 2)) = 0x0902; //配置寄存器5#,D0-RT地址奇偶校验,D1-RT地址0,D8-间隔检测使能,D11-扩展相交使能
//这里配置地址有些问题,只能配置到rt1,RT26改不过去,不知道是不是因为硬件电平问题
*(volatile INT32U *)(BM1553b0MEM + (0x100 << 2)) = 0x0000; //堆栈初始化首先还是配置寄存器,这里备注比较详细,可以对照61580的芯片手册查阅具体作用
这里博主遇见一个问题,就是RT的地址只能设置为1,设置到别的地址就无法通信,这个问题后续会解决。暂时拿RT1来进行测试。
int i;
for(i=0;i<4096;i++)
{
*(volatile INT32U *)(BM1553b0MEM + (i << 2)) = 0x0; //初始化存储器
}清空存储器区域。
int i=0,j=0;
for(i=1;i<32;i++)
{
*(volatile INT32U *)(BM1553b0MEM + ((0x140+i) << 2)) = 0x400+(i*0x20); //接收通道地址初始化
*(volatile INT32U *)(BM1553b0MEM + ((0x160+i) << 2)) = 0x800+(i*0x20); //发送通道地址初始化
*(volatile INT32U *)(BM1553b0MEM + ((0x1A0+i) << 2)) = 0x4200; //子地址控制字初始化 ,开启发送和接收EOM中断
//0x4200->0100 0010 0000 0000
}
*(volatile INT32U *)(BM1553b0MEM + (0x120 << 2)) = 0x0000; //方式字数据初始化 只有子地址为0x0000才存在方式字的说法然后是配置存储器区域,这里补一张RT存储区域定义图
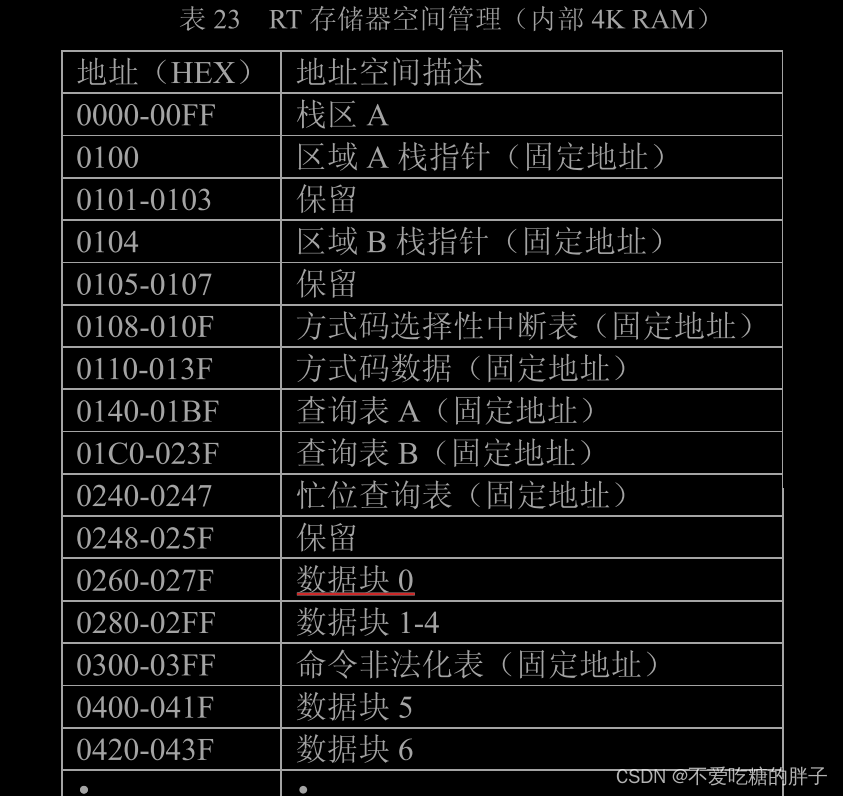
图上可以看出,从0x140开始是A查询表,这个RT查询表放置是接收/发送/广播数据块的地址。通过查询表里存的地址,就可以找到对应的数据块。PS:这个应该是给BC往RT读写数据用的,BC要知道它下发数据或者取走数据是从什么位置。
for(i=0;i<8;i++)
{
*(volatile INT32U *)(BM1553b0MEM + ((0x240+i) << 2)) = 0x0000; //忙位设置,初始化为0空闲
} 然后是忙位查询表设置,这个不是很懂,暂时用不到就没关注了。
*(volatile INT32U *)(BM1553b0REG + (0x1 << 2)) = 0x8f80; //配置寄存器2#,开启RT最后是打开RT。
2、RT中断服务程序
u16 tempVar = 0;
u16 temp;
u16 i;
tempVar = *(volatile INT32U *)((BM1553b0REG+(channel*0x00100000)) + (BUINTSTATUS << 2)); //读中断状态 消息结束中断
tempVar &= BUEOMINT;
if(tempVar==BUEOMINT) //判断消息结束
{
//读当前消息通道是来自A或B
tempVar = *(volatile INT32U *)((BM1553b0REG+(channel*0x00100000)) + (BUCFG1 << 2));
bumsgifm->channelAB=(tempVar>>13) & 0x1;
//读块状态字 这个不太懂是什么 手册上写的是BC/RT命令栈点寄存器
bumsgifm->blockStatusWord = *(volatile INT32U *)((BM1553b0REG+(channel*0x00100000)) + (BUCMDSTACKPOINT << 2));
//读时标
bumsgifm->timeTagWord = *(volatile INT32U *)((BM1553b0REG+(channel*0x00100000)) + (BUTIMETAG << 2));
//读RT/MT数据堆栈地址寄存器 数据块指针 这个是翻61580数据手册查到的 BM3610只说了MT 搞不懂
bumsgifm->dataBlockPointer = *(volatile INT32U *)((BM1553b0REG+(channel*0x00100000)) + (BURTDATASTACKADDR << 2));
//RT最后一个指令寄存器 0dH 接收的命令字+
bumsgifm->commandWord = *(volatile INT32U *)((BM1553b0REG+(channel*0x00100000)) + (BURTLASTCMD << 2));
//命令字 15-11 RT地址 10:T/R 9-5:字地址/方式 4-0:数据字计数/方式码
bumsgifm->remoteTerminalAddr = (bumsgifm->commandWord >> 11) & 0x1f;//RT终端地址
bumsgifm->tr = (bumsgifm->commandWord >> 10) & 0x01;//T/R
bumsgifm->subAddModeCode = (bumsgifm->commandWord >> 5) & 0x1f; //字地址/方式
bumsgifm->dataCntModeCode = (bumsgifm->commandWord ) & 0x1f; //数据字计数/方式码
printf("BUMSG.commandWord :%#x\n",bumsgifm->commandWord);
if(bumsgifm->tr == BURX) //判定接下来是接收指令
{
memset( bumsgifm->data,BUZERO,BUMSGDATANUM);
if(!bumsgifm->dataCntModeCode)
{
temp=BUMSGDATANUM;
}
else
{
temp=bumsgifm->dataCntModeCode;
}
for(i=0;i<temp;i++)
{
bumsgifm->data[i] = *(volatile INT32U *)((BM1553b0MEM+(channel*0x00100000)) + ((0x400+i) << 2));
}
rev_1553B_CH0=1; //启动接收标志,解析函数在主循环执行
}
}以上是RT中断服务程序,解析了数据帧的命令字和控制字(至于为什么有这两段字可以解析,可以看前一篇BC端设置的文章,还有更前面的1553B协议解析篇),还有就是读取数据。
这部分程序可以实现BC=>RT的下发,博主目前是跑通了。
3、RT发送数据到BC
这部分是难点,博主卡在这有半个月最少。
首先需要着重强调一点,就是RT所有的动作都需要由BC来主控。
可以理解成:BC对RT有绝对的控制权,除非BC要求RT说话,RT才能说话。
这个过程很多博文没解释清楚一个问题:BC是怎么知道RT有话要说,才去让RT开口说话呢?
解释这个问题就需要提到一个东西:矢量字 (奇奇怪怪的名字,但是就是它来实现的)
RT 如果主动给BC发送数据?矢量字使用问题?
1553中所有的消息控制都是通过BC端控制的。BC端可以发出BCRT、RTBC、ModeCode、RTRT类型消息。实际应用中经常会出现RT需要主动给BC端上报信息,这种情况下可以通过发送矢量字来实现(Mode Code 16)。
具体流程:
1) BC端周期性发送 Mode Code 16 消息(发送矢量字),RT端周期的接收矢量字指令。RT端默认发送的矢量字设为0,BC端检测到RT发送的矢量字是0的时候,不做任何操作。
2) 如果RT端需要主动发送数据给BC,RT端先准备好数据,然后将矢量字对应位置位(对应位写1)。
3) BC端检测到RT端发送过来的矢量字有位为1,BC根据事先约定的对应关系,发送对应的指令(比如RTBC指令)。
4) RT接到RTBC指令后,发送数据给BC,数据发送消息结束后,RT端将矢量字对应位清0。
5) 如果RT有新的数据要发送给BC,重复2)到4)。
矢量字对应位和RT 子地址常用的对应关系如下表所示。
表 矢量字对应位和RT子地址常用对应关系表
SA1对应矢量字第0位
如果BC端检测到矢量字第0位置1,发送对应SA1的RTBC指令
SA2对应矢量字第1位
如果BC端检测到矢量字第1位置1,发送对应SA2的RTBC指令
SA3对应矢量字第2位
如果BC端检测到矢量字第2位置1,发送对应SA3的RTBC指令
SA4对应矢量字第3位
-----------------
SA5对应矢量字第4位
-----------------
SA6对应矢量字第5位
-----------------
SA7对应矢量字第6位
-----------------
SA8对应矢量字第7位
-----------------
SA9对应矢量字第8位
-----------------
SA10对应矢量字第9位
-----------------
SA11对应矢量字第10位
-----------------
SA12对应矢量字第11位
-----------------
SA13对应矢量字第12位
-----------------
SA14对应矢量字第13位
-----------------
SA15对应矢量字第14位
如果BC端检测到矢量字第14位置1,发送对应SA15的RTBC指令
SA16对应矢量字第15位
如果BC端检测到矢量字第15位置1,发送对应SA16的RTBC指令
注:上表只是一般常用的对应的关系,用户应根据实际需要使用矢量字功能。矢量字和RT SA对应关系是BC端和RT端通信之前双方约定好的,不限于RTBC指令。
引用一段某公司的矢量字应用答疑。
个人理解这个矢量字:BC会不断以某个间隔去问RT你有没有需要说的,他们之前提前规定了N种说话类型,RT会在需要说话的时候提前把要说话的类型提前反馈给BC(状态字),就是上引用里提到的SA0-SA30。
矢量字就是包含在状态字里,这个概念也很重要。实际上1553通信由这几种字来实现:控制、命令、数据、状态。(这里怎么玩的,可以去翻看前面的协议介绍篇)

这个过程里,第一个命令字是BC给的,然后RT回一个状态字,这个过程是以某个间隔不断进行的。 状态字给到BC后,RT就会开始发送数据字。
最后一个问题,RT端怎么把需要发送的数据给到BC?这个过程实际上是RT端将数据存到RT端的存储器区域,然后协议芯片会在前面两步骤完成之后,将这部分数据拼凑成数据字发送出去。
所以,对于编程来说,只需要找到放数据的存储器区域即可,提前写进去然后修改矢量字即可(SA1)。
这里不得不提到博主任务书里的RT26-SA30-32→BC这个RT发送数据到BC的过程描述,之前一直没搞明白为什么有个SA30,还有个32。后面博主知道32是代表的子地址32,但是SA30是真的没明白,又没办法直接和甲方交流。这里搞明白了,是RT地址26在置位SA30后,往32子地址里写入数据,就可以发送到BC。PS:这里的32和SA30都说相对于BC来说的。
暂时写到这里,博主的RT上传部分程序编写又卡住了,矢量字有一个对应关系,这个SA30怎么设置呢?















 343
343











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









