







在条形码识别软件中有图像预览的功能。有时预览的图像需要进行转置(旋转180度或者90度)、缩放、镜像(左右反转)等操作。OpenCV提供了相应的函数进行以上操作。例如:
转置:cv::WarpAffine()
缩放:cv::resize()
镜像:cv::remap()
如果同时要转置,缩放和镜像,就需要进行三次图像运算。其实以上三个操作都是同一类型的变化,称作仿射变化。可以把这3次图像运算合并成一次,从而优化运算时间。如何合并这三次运算,需要从仿射变换的原理说起。
举个例子,我们需要对以下图像(蓝色)顺时针旋转90度(橙色),可以这么做:假设原来的图像宽w高h
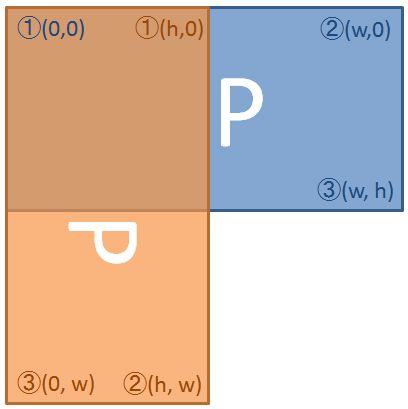
(1) 创建宽h高w内存区域存放新图像;
(2) 逐一把原图像中的像素(x0,y0)搬到新图像的对应像素(x1,y1)
例如原图像的左上角点①(0,0)被搬到新图像的右上角(h,0);
右上角点②(w,0)被搬到新图像的右下角(h,w);
右下角③(w, h)被搬到新图像的左下角(0,w)
以此类推,可以发现(x0, y0)和(x1, y1)之间存在以下规律:
X1=-y0+h; y1=x0;
对于其他各种几何变换,平移、缩放、镜像等,我们都可以用类似的方法进行运算。因此可以把上式写成通用的形式:
x1=ax*x0+bx*y0+cx
y1=ay*x0+by*y0+cy
在顺时针旋转90度的例子中,
ax=0,bx=1,cx=0;ay=−1,by=0,cy=w
更一般的,我们可以把上面写成矩阵形式:
(x1y1)=(axaybxbycxcy)×⎛⎝⎜x0y01⎞⎠⎟
或者齐次形式。
⎛⎝⎜x1y11⎞⎠⎟=⎛⎝⎜axay0bxby0cxcy1⎞⎠⎟×⎛⎝⎜x0y01⎞⎠⎟
我们把矩阵 MT=⎛⎝⎜axay0bxby0cxcy1⎞⎠⎟ 称作仿射矩阵。















 5615
5615

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









